信号交叉口智能网联车协同换道方法研究毕业论文
2020-02-19 16:39:57
摘 要
车辆换道行为是交通流理论研究的重要组成部分,为了研究在车路协同技术环境下智能网车交通流的特性,本文基于车辆换道的效率和安全性,展开智能网联车与周围道路及车辆的信息交互进行协同换道研究。前期调研表明:现有的智能网联车协同换道方法研究主要集中在常规路段,较少涉及信号交叉口路段。由此,本文开展针对信号交叉口车路协同环境下,智能网联车换道需求、换道方式及其协同换道方法的研究。
通过分析车路协同条件下信号交叉口特定的时空特征,研究智能网联车换道决策规则,建立智能网联车换道决策方法;并基于车-车通信获取周围车辆运动状态信息建立车辆换道安全间距模型,制定换道决策。规划换道过程中周围车辆的具体协同方式,剖析车辆和周围车辆的具体运动状态,量化建立数学规划模型,以降低换道车辆对周围车辆的影响、提高换道效率、增加换道过程的平滑舒适性为目标,规划最优的换道时长和车辆纵向加速度。采取五阶多项式的换道轨迹拟合换道车辆运动过程中的横向运动过程,提出换道实施规划方法。最后假定车辆换道的具体场景,通过算例验证模型的可行性。
关键词:车路协同;协同换道;换道决策;数学规划;五阶多项式
Abstract
Vehicle lane-changing behavior is an important part of traffic flow theory research. In order to study the characteristics of intelligent network vehicle traffic flow under the environment of vehicle-road collaboration technology, based on the efficiency and safety of vehicle lane-changing, this paper carries out collaborative lane-changing research on the information interaction between intelligent connected vehicles and surrounding roads and vehicles. Previous research shows that the existing research on Cooperative lane-changing methods of Intelligent connected vehicles mainly focuses on conventional sections, and seldom involves signalized intersection sections. Therefore, this paper carries out the research on the demand, mode and method of lane-changing of Intelligent connected vehicles under the traffic-road collaboration environment at signalized intersections.
By analyzing the specific temporal and spatial characteristics of signalized intersections under the condition of vehicle-road coordination, this paper studies the lane-changing decision rules of Intelligent connected vehicles, establishes the lane-changing model of Intelligent connected vehicles, and establishes the safe distance model of vehicle lane-changing based on vehicle-vehicle communication to acquire the information of the surrounding vehicle motion state, formulates the decision of lane change, and plans the specific cooperation mode of vehicles around the process of Lane The specific motion state of vehicles and surrounding vehicles is analyzed, and a mathematical programming model is established quantitatively, aiming at reducing the influence of lane-changing vehicles on surrounding vehicles, improving lane-changing efficiency and increasing the smoothness and comfort of lane-changing process, the optimal lane-changing time and vehicle longitudinal acceleration are planned. Fifth-order polynomial lane-changing trajectory is used to fit the lateral motion process of lane-changing vehicles, and a lane-changing implementation planning method is proposed. Finally, a specific scenario of vehicle lane change is assumed, and the feasibility of the model is verified by an example.
Key Words:Vehicle-road coordination; Cooperative lane-changing; Lane-changing decision; Mathematical programming; Fifth-order polynomial
目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 1
1.2.1 换道决策方法 1
1.2.2 换道模型 2
1.2.3 研究现状评述 3
1.3 研究目标与内容 3
1.4 本章小结 4
第2章 信号交叉口协同换道情景 5
2.1 信号交叉口协同换道环境 5
2.2 换道场景 6
2.3 换道需求 7
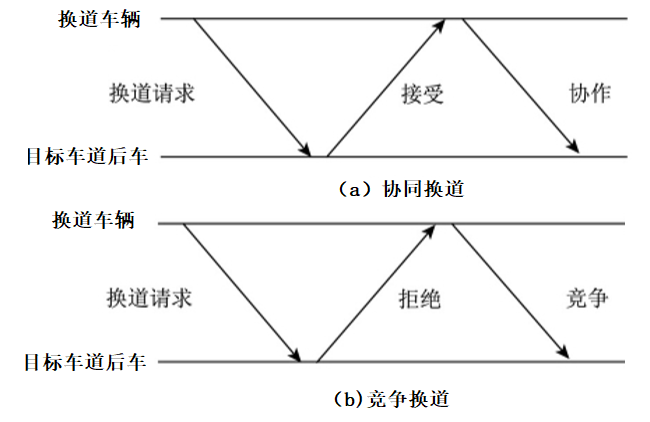
2.4 换道方式 7
2.5 本章小结 9
第3章 协同换道模型 10
3.1 换道决策方法 10
3.1.1 决策规则 10
3.1.2 决策条件 11
3.2 协同方法 14
3.2.1 车车协同 14
3.2.2 车路协同 16
3.3 换道模型 17
3.3.1 纵向运动状态模型 17
3.3.2 横向运动状态模型 20
3.4 本章小结 22
第4章 算例 23
4.1 算例介绍 23
4.2 换道建模 24
4.3 模型求解 24
4.3 本章小结 26
第5章 总结 27
5.1 研究成果 27
5.2 创新点 27
5.3 研究展望 28
参考文献 28
致 谢 30
第1章 绪论
1.1 研究背景及意义
随着城市道路交通的快速发展和汽车保有量逐渐增加,道路交通事故越来越频发。在大量的交通事故中,因车道变换而引起的事故占有相当大的比例。车道变换是一个较为复杂的过程,相比车辆的跟驰行为,车辆在换道过程中不仅需要考虑当前车道上车辆信息,同时需要考虑目标车道上的车辆与道路环境信息等众多因素,绝大多数的换道事故是由于驾驶员在进行车道变换时对周围环境信息获取不足而产生的。在交叉口环境下,车辆间距相比常规路段更小,同时车辆行驶受交叉口标志标线以及信号相位的影响,驾驶员换道时需要考虑的因素相比常规路段更为复杂。另一方面,车辆通过交叉口时需要进行目标方向车道的选择,车辆换道强制性强、换道频率高,换道对其他车辆行驶影响大,同时易受其他车辆驾驶行为影响,车辆换道困难。
随着智能信息时代的到来,车路协同技术成为智能交通系统研究与发展的热点。车路协同技术通过探测传感设备获取车辆与路道信息,利用无线通信技术实现车与车、车与路之间的实时信息的交流互动和协同配合。车路协同技术使车辆换道时能够实时获得周围车辆和道路的信息,增强了换道车辆对周围环境的判断能力。
车路协同技术的发展为未来车辆之间的协同换道提供了技术支持和通信基础,当车辆产生换道需求时,换道车辆获取周围车辆和道路环境信息,可有效解决车辆换道时由于信息获取不足而造成的驾驶员错误判断的问题;同时周围车辆接收到换道请求后,进行协同配合提供换道条件,可显著提高换道效率,因此研究车路协同环境下的智能车协同换道方法具有重要意义。特别在交叉口环境下,车辆换道空间受限,其换道时间要求较短,换道需求较高且带有强制性等特点,因此需要制定交叉口环境下的车辆换道方法以提高换道过程的安全性,减少换道车辆对周围非换道车辆行驶的影响,进而减少因车辆换道带来的行车延误。
1.2 国内外研究现状
目前国内外针对智能网联车的协同换道方法研究主要集中在常规路段的自主换道,考虑交叉口环境下的换道行为的研究较少。总体来说,智能网联车的换道方法的研究可分为两部分:制定换道决策和建立换道模型[1]。换道决策为车辆产生换道需求后系统根据当前道路交通情况,判断其是否满足换道条件,制定换道策略;换道模型是对换道过程中换道车辆的运动过程的具体规划,规划换道轨迹。
1.2.1 换道决策方法
现有的换道决策方法主要基于规则模型、离散选择模型、人工智能模型等其他模型建立[1]。离散选择模型适合用于研究不同的驾驶员个体的换道决策行为的差异性,基于模糊算法的人工智能模型可以较好地反应驾驶人决策行为的不确定性的特征。规则模型是最常见的换道决策方法构架,其中:Gipps[2]最早提出基于规则模型的换道决策,决策方法将车辆是否变换车道的判断过程抽象为具有一系列的决策条件的决策树,最终输出决策(换道/不换道)结果,建立了基于规则模型的换道决策基础逻辑。基于规则模型的决策方法可以根据实际场景加减或更换换道决策条件,模型比较灵活,但模型无法考虑驾驶员在进行决策判断时的个人行为差异。NETSIM模型[3]在Gipps提出的决策规则的基础上以车辆间距为主要的决策条件,通过比较目标车辆与其后车当前的车辆间距和可接受车间距大小来决定是否执行换道,换道时可接受的车间距的提出引起之后部分学者关于换道安全间距的研究。
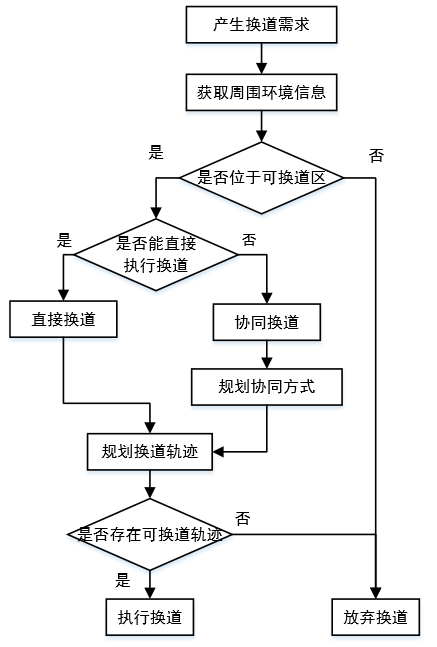
杨刚[4]在并行协同换道的研究中制定的换道规则通过车车通信获得场景中各车辆的状态信息,采用换道安全距离判断是否换道;李珣[5]在决策规则中根据车辆间的速度和间距设定车辆之间的威胁度,以此来反应换道车辆对周围车辆的影响和判断车辆是否能安全换道;Arbis[6]基于博弈论建立换道决策规则,通过比较换道收益大小判断是否换道;等人[7-8]在元胞自动机模型中加入换道规则研究车辆的换道模型。上述学者虽然在换道决策时处理方法不同,但决策逻辑仍基于规则模型,在决策条件的选取上各有差异。总结来看,智能网联车的换道决策规则的整体流程和逻辑大致可分为以下几步:获得换道场景中车辆位置与运动状态信息;根据决策条件判断车辆能否换道;若条件允许换道,规划车辆的换道轨迹,执行换道过程;若不满足换道条件,对车辆运动状态进行调整进行协同换道或放弃换道。
1.2.2 换道模型
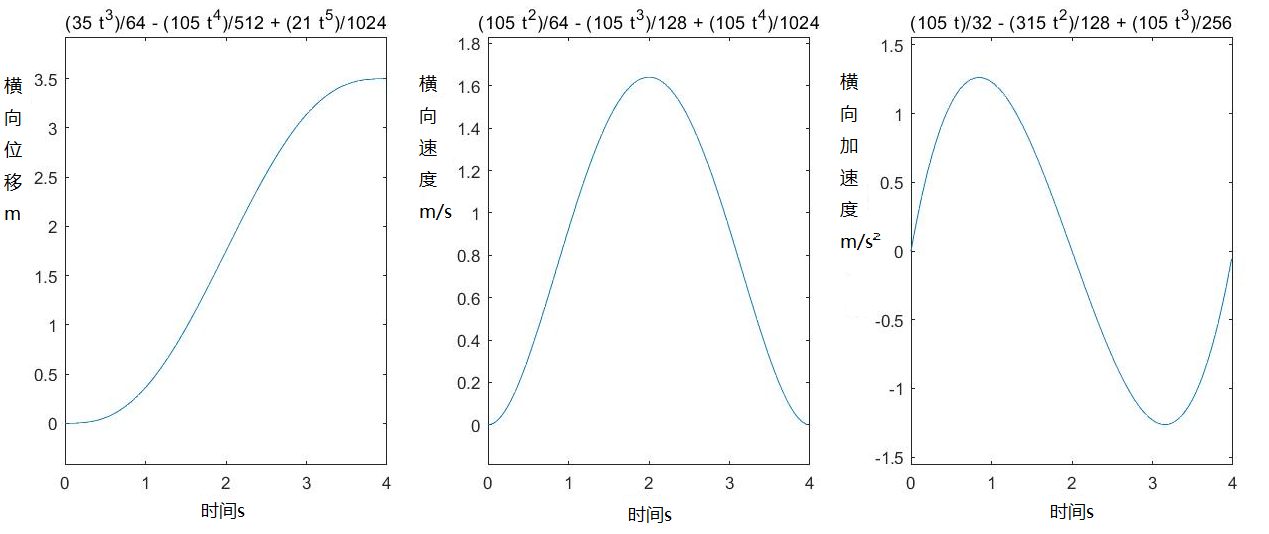
车辆的换道模型规划车辆的具体运动状态。现有的研究采用换道轨迹曲线拟合车辆的换道过程,应用于智能网联车的换道轨迹规划模型诸较多,例如基于多项式函数的换道轨迹规划模型[9]。该方法通过五阶多项式生成平滑的车辆换道轨迹曲线,应用最为广泛。后面许多学者在此基础上进行了拓展研究:如游峰[10-11]等人在多项式算法的基础上,建立了道路上存在障碍物的情景下的换道实施模型; Luo[12]首次提出了动态的车辆换道轨迹规划模型,使用与时间相关的多项式来表示车道变换轨迹曲线。除此之外,基于几何方法生成的换道轨迹模型包括等速偏移换道轨迹和圆弧换道轨迹[13],模型将车辆的轨迹曲线理想化为由直线和圆弧构成,模型较为简单,生成的轨迹曲线存在曲率不连续的缺点,与车辆的实际运动轨迹不相符。部分学者采用B样条曲线对上述换道轨迹进行再规划[13],在直线和圆曲线的连接处加入缓和曲线进行平滑处理以解决上述模型的缺陷,但车辆在低速状态下进行车道变换时,轨迹存在着最大曲率即横向最大加速度过大的缺点。梯形加速度换道轨迹从基于车辆的在换道过程中的横向加速度变化规律,将横向加速度的变化过程抽象为两个大小相同的正反梯形,该轨迹符合车辆变化过程中曲率连续变化的特征[14],但制定轨迹时需预先设定车辆换道横向最大加速度与加速度变化率,轨迹制定后若需调整换道过程则比较困难,模型不够灵活。Wang[15]等许多学者将规划机器人路径的人工势场模型用于智能车辆的轨迹规划,然而这些方法在产生最优轨迹时,并未考虑车辆的一些特性,这可能导致规划的轨迹并不适合于车辆进行跟随。
1.2.3 研究现状评述
现有车辆协同换道方法研究主要集中在常规路段,信号交叉口环境下车辆的换道行为与常规路段存在一定差异[16]。在信号交叉口路段,车辆换道的过程同样可分为制定换道决策与规划换道轨迹。
在换道决策方面,常规路段的换道决策由于目标车道的行驶车速等换道需求而决定,当周围环境无法满足换道条件时,放弃换道或协同换道;在交叉口路段车辆的换道强制性强,同时在换道时间和换道距离上需要考虑交叉口的时空环境,因此现有的常规路段的换道决策方法无法应用于信号交叉口路段。在换道执行过程中,现有的协同换法往往只考虑当满足换道条件时,结合周围车辆的运动状态信息制定最优的换道轨迹,对于换道条件不充分情形下的换道实施方法研究较少,同时忽略了换道车辆的周围车辆在换道过程中的具体协同方式。
1.3 研究目标与内容
针对关于信号交叉口环境下的协同换道的研究现状的不足,本文的研究目标主要分为以下三点:
(1)制定车辆在信号交叉口环境下的换道决策方法,实现车辆在产生换道需求后可根据周围环境信息做出换道方式的正确选择。
(2)规划车辆在信号交叉口环境下采取协同换道时,换道车辆与周围车辆和道路环境之间的具体协同方式,使得协同换道过程高效、安全的完成。
(3)规划换道过程中周围车辆的运动状态和换道车辆的换道轨迹,保证运动过程符合车辆自身特征和道路环境的约束。
基于以上研究目标,根据国内外的相关研究,在现有智能网联车的常规路段的换道方法的基础上,结合信号交叉口的时空特征建立车辆的协同换道方法,研究的主要内容如下:
(1)描述和界定换道场景。对产生车辆换道行为的信号交叉口环境和典型换道场景进行描述,分析信号交叉口环境对于车辆的换道需求和换道方式所产生的影响,基于研究目标,确定本文研究范畴。
(2)制定换道决策规则和决策条件。以规则模型为换道决策的逻辑基础,根据换道场景和车辆获取的相关信息制定换道决策规则,确定换道决策的决策条件。
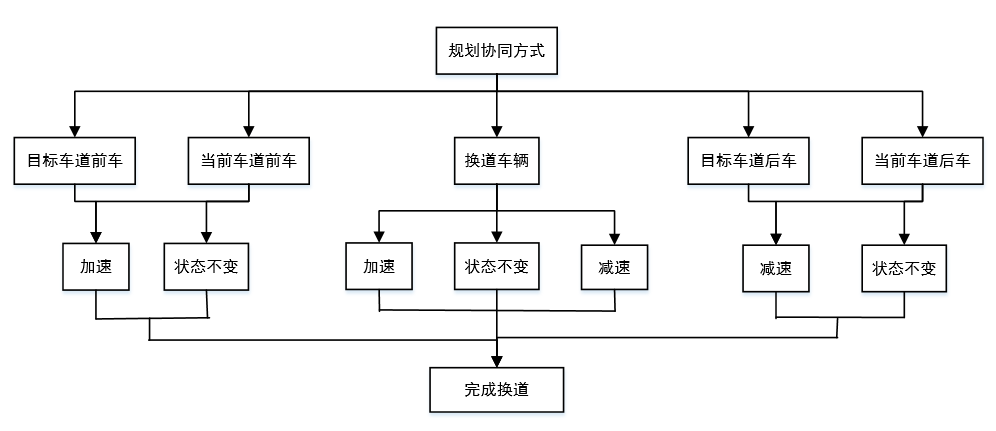
(3)规划换道车辆的具体协同方式。当车辆采取协同换道时,研究车辆与车辆之间的协同、车辆与道路环境之间的协同,规划换道车辆和周围车辆的协同方式。
(4)规划换道车辆和周围车辆的运动状态。建立换道模型规划换道车辆和周围车辆在换道过程中的横纵向位移、速度和加速度。
1.4 本章小结
本章节探讨了信号交叉口环境下智能网联车协同换道的研究背景和意义,整理了国内外关于协同换道的相关资料,从换道决策方法和换道轨迹模型出发,分析了现有的各类研究方法的特征,针对现有的协同换道方法大多集中在常规路段且忽视了车辆的具体协同方式的不足,明确了本文的研究目标和研究内容。
第2章 信号交叉口协同换道情景
信号交叉口协同换道情景是研究协同换道机制的基础。信号交叉口环境相比常规路段,具有更强的时空协同特征,对车辆换道行为的影响较大。因此,建立车辆产生换道行为发生的典型场景描述换道过程中换道车辆对周围车辆之间的相互关系,分析该环境对车辆的换道需求和换道方式的影响,确定文章的研究范围。
2.1 信号交叉口协同换道环境
本文研究信号交叉口环境下的智能网联车的协同换道方法。交叉口路段指两条或两条以上线路在同一平面上相交所形成的区域(立体交叉口不考虑在内),车辆通过交叉口要进行一系列的行为:信息感知、跟驰行为、换道行为、转向或直行等。交叉口的功能区则是这一系列行为发生的空间范围,即在该区域内车辆的运动状态会受到交叉口的影响,交叉口的功能区包括:交叉口上游区域、交叉口下游区域和交叉口交织区域。普遍存在于城市道路交通中的信号交叉口,由于不合理的换道引起的交通事故和通行延误不在少数。
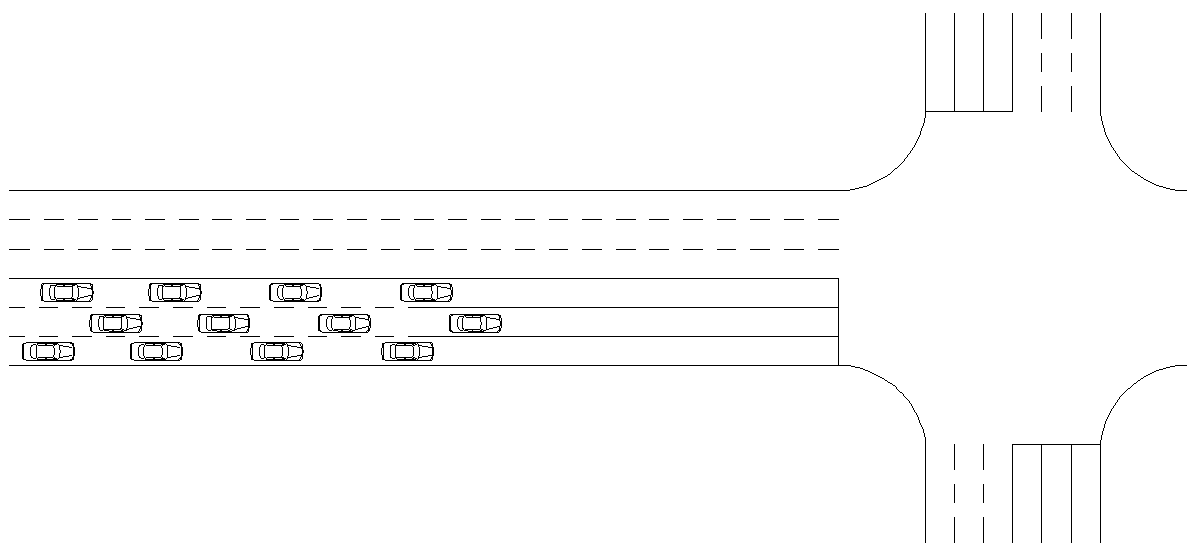
车辆的换道行为主要发生在信号交叉口上游功能区,因此该功能区为换道行为产生的具体场景,信号交叉口的上游区域的对车辆的换道存在空间和时间上的影响:
(1)信号交叉口上游区域相比常规路段在空间上存在着换道区域的限制。信号交叉口上游车道分隔线可分为虚线段和实线段,车辆可在行驶过程中越过虚线分隔线执行换道,实线段禁止换道。因此在空间上可将信号交叉口上游区域分为可换道和不可换道区域。由于城市道路的交叉口路段一般位于较为平坦地带,路况较好,不考虑带有坡度、弯度和存在路面障碍的交叉口。
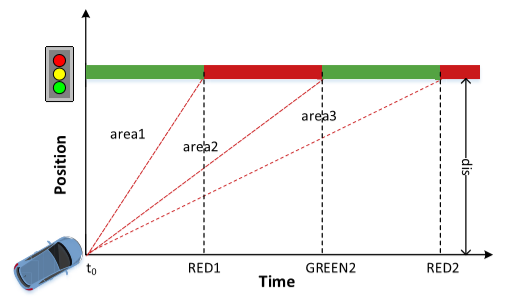
(2)车辆在交叉口上游区域行驶时受当前信号相位的影响,不同信号相位期间车辆的运行状态不同。将交叉口的信号相位分为红灯时间和绿灯时间两段,由于黄灯时间车辆需要选择是否通过交叉口,情况较为复杂,忽略黄灯时长的影响。在车路协同的环境下,交叉口上游的车辆可获取信号相位的红灯时长和绿灯时长以及当前时刻所处的信号相位状态。
图1表示信号交叉口上游区域的时空图,图中dis表示某辆车距离交叉口停车线的距离,设为交叉口上游车道分隔线为实线段的长度,则当时,车辆位于可换道区域内。设为当前时刻所处的信号相位,信号相位的绿灯和红灯时长分别为,则。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: