摄影测量学的运动恢复结构:一个为科学应用的低成本而有效的工具外文翻译资料
2022-07-21 15:28:30
英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
摄影测量学的运动恢复结构:一个为科学应用的低成本而有效的工具
M.J. Westoby a, J. Brasington b, N.F. Glasser a, M.J.Hambrey a, J.M. Reynolds c
a阿伯里斯特维斯大学penglais校园,地理和地表科学学院,英国
b英国伦敦大学玛丽皇后学院地理学院
c雷诺兹国际有限公司,单位17,模具商业园,模具,英国
摘要
高分辨率地形测量一般需要高成本的资金和物流,因此数据采集通常交给专业的第三方机构。对于许多在地表科学的应用,由于数据收集的高成本,导致许多领域难以实现,致使更便宜、更便携的测量平台(即地面激光扫描或GPS)的实现不切实际。本文概述了一种革命性的、低成本的、用户友好的摄影测量技术来获取一系列范围的高分辨率数据集,称为运动恢复结构(SfM)。传统的软拷贝摄影测量方法需要相机的三维定位和姿势,或地面控制点的三维位置,以方便现场的三角测量和重建。与之相比,SfM方法解决了相机的姿势和几何场景的自动和同时性问题,使用基于在多个重叠匹配特性的高度冗余调节束来抵消图像。 我们先展示了一个全面的技术介绍,然后是使用概要的方法创建了高分辨率的数字高程模型(DEMs),通过使用消费级数码相机获得了大量的图片排版。作了一个初始的技术评估,一个由SfM推导的数字高程模型可以直接与类似的用地面激光扫描获得的模型相比较。这个比较表明可以在复杂的地形和土地覆盖范围通过使用SfM实现分米级垂直精度。SfM的应用例子跨过一系列范围,包括三个截然不同的地貌,一个裸露的岩石海岸悬崖;一个有缺口的复杂冰碛坝;和一个极度雕刻的基岩脊。SfM技术代表了在地表科学的摄影测量应用领域的重要进步。我们的研究结果和经验表明,SfM是捕获复杂的地形最廉价的,有效的和灵活的方法。
1.介绍
在过去的十年中,我们见证了测绘学在改变数字高程模型和地形地貌分析的一场技术革命。它刺激了传统的地面测量的发展,如出现差分GPS(如,Brasington et al .,2000)和无棱镜,机器人全站仪(如,Keim et al .,1999; Fuller et al .,2003),地形数据的获取已通过新生一代的遥感技术而发生了大多数显著性蜕变。机载和更新的地面激光扫描(如Lohani 和Mason, 2001; Rosser et al., 2005; Heritage 和 Hetherington, 2007; Jones et al., 2007; Hodge et al., 2009; Notebaert et al., 2009) 和软拷贝摄影测量 (如,Lane et al., 2000; Westaway et al., 2000; Brasington 和 Smart, 2003) 特别是,这些技术进步已经彻底改变了数字高程模型 (DEMs) 的质量,延长它们的空间范围、分辨率和精度。
机载和地面遥感的发展也已经反映在水文测量的进步中,特别是通过单一和多波束声纳(例如,Parsons et al., 2005; Sacchetti et al., 2012)。这些声学探测,预示着这种可能性,能够厘米间距和三维点高质量构建真正连续而高精度地混合地面,淡水和海洋环境的地形模型。最后,关闭工艺循环,获取遥感数据可以从一系列的便宜而轻量级,部署着成像传感器的平台,如无人驾驶车辆或无人机(如,Lejot et al., 2007; Niethammer et al., 2012)栓的风筝和飞艇(例如,Marzolff et al., 2003; Boike 和 Yoshikawa, 2003; Smith et al., 2009; Vericat et al., 2009)逐渐变得越来越普遍。
而在地理空间技术的发展步伐已经被加快的情况下,在偏远的高山环境中进行高质量的地形数据采集仍然是具有挑战性的。在这些充满敌意的景观中,陡峭而松散的斜坡和卫星覆盖不足阻碍了GPS或全站仪在地面调查中的应用。替代地面的方法如地面激光扫描(TLS)是复杂的,需要高投资成本和大型仪器的便携性以及在偏远地区的电力供应。机载调查,包括激光雷达和摄影,也是由于高的山地景观的三维性导致图像透视和显著的视线损失而受限制使用。此外,部署调查平台,包括高原直升机和规模较小的无人机是高度依赖于有利的天气条件,而这些地方往往会有高风速和被云覆盖。潜在的解决方案可能最终取决于高分辨率卫星数据的可用性,但目前现有的主动和被动传感器的空间分辨率,通常相比地面技术和适于详细的地貌应用上太粗糙,而不能创建DEMs。
1.1. 摄影测量方法
十几年以来或自从自动空中和近景数字摄影测量的出现,它已成为三维地形建模的一个强大的并广泛使用的工具(Remondino 和 El-Hakim, 2006; Matthews, 2008; Fraser 和 Cronk, 2009)。软拷贝三角和基于图像的地形提取算法的发展,从根本上增强了可以来自重叠的立体像对的地形数据的质量(Chandler, 1999; Lane et al., 2000))。同样,在紧凑的单镜头反光(SLR)相机成本和质量的改进(Clarke 和 Fryer, 1998; Chandler et al., 2005; Remondino 和 Fraser, 2006) ,已经能民主性获得摄影造型并鼓励在地貌上广泛使用。这包括监测河床和平面图(如 Lane, 2000; Chandler et al., 2002; Brasington 和 Smart, 2003; Bird et al., 2010),河岸(如Barker et al., 1997; Pyle et al., 1997)和腐蚀沟(如Barker et al., 1997; Pyle et al., 1997),并在冰川学领域,冰川表面变化的量化(如Baltsavias et al., 2001; Keutterling 和Thomas, 2006)。数字摄影测量技术也被应用到许多地质难题,包括不连续的特性(如Krosley et al., 2006; Sturznegger and Stead, 2009)和岩质边坡的稳定性分析(如Haneberg, 2008)。近距离应用还包括土壤侵蚀的直接量化和实验室规模的地貌演化模型(e.g. Stojic et al., 1998; Hancock 和Willgoose, 2001; Lane et al., 2001; Brasington 和 Smart, 2003; Rieke-Zapp 和 Nearing, 2005; Heng et al., 2010).
1.2. 运动恢复结构
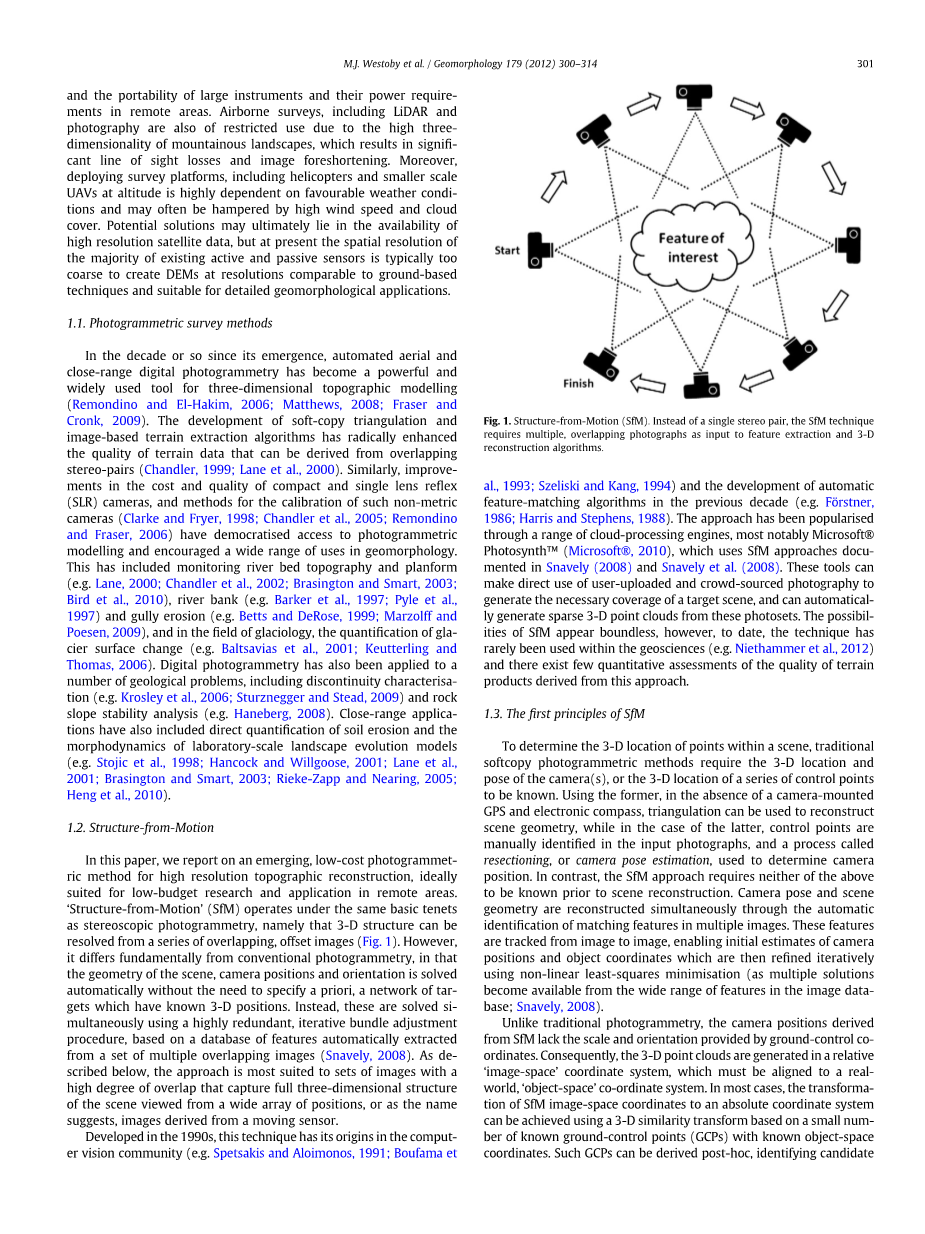
在本文中,我们报告一个新兴的、低成本的,用于高分辨率地形重建的摄影测量方法,非常适合低预算的研究和在偏远地区的应用。“运动恢复结构(SFM)是在下立体摄影测量相同的基本原则下进行,即是三维结构可以从一系列重叠的偏移的图像解决(图. 1)。然而,它在根本上不同于传统的摄影测量,在几何场景,摄像机的位置和方向上能自动求解,无需指定一个先验的,一个具有已知的三维位置的目标网络。相反,这些都是使用,基于从一组多个重叠的图像(Snavely, 2008)中提取的数据库的自动特征,而运用的一个高度冗余的,迭代平差过程同时解决。如下所述,该方法是最适合于具有高程度的重叠,捕捉从各种各样的位置观看现场的全三维结构图像集,或顾名思义,来自一个运动传感器图像。
在20世纪90年代开发出的这种技术有它在计算机视觉界的起源(e.g.Spetsakis 和Aloimonos,1991, Boufama et al .,1993 Szeliski 和Kang,1994)和自动特征匹配算法在过去十年的发展。(如. Fouml;rstner, 1986; Harris 和Stephens, 1988).这个方法是通过一系列的云处理引擎推广,最明显的是Microsoftreg;Photosynthtrade;(Microsoftreg;,2010),它使用SfM方法记录Snavely(2008) 和Snavely et al(2008) 。这些工具可以直接使用的用户上传和人群来源的摄影,以产生一个目标场景的必要的覆盖,并且可以从这些图片集自动生成稀疏的三维点云。SfM出现了无限的可能性,然而,迄今为止,这项技术已经很少在地表科学中使用(如Niethammer et al .,2012 )和存在少量使用这种方法的地形产品质量的定量评估。
图 1.
运动恢复结构(SFM)。不是一个单一的立体像对,SFM技术需要多个重叠的照片作为输入,用于提取特征和三维重建算法。
1.3. SfM的第一原则
确定在一个场景中点的三维位置,传统的软拷贝摄影测量方法需要相机的三维位置和姿势,或已经知道一系列控制点的三维位置。使用前着,没有一个摄像机安装GPS和电子罗盘,三角测量可以用来重建场景的几何结构,而在后者的情况下,控制点是输入照片的人工识别,这一过程被称为切除,或相机姿态估计,用于确定摄像机的位置。相比之下,SfM方法不需要知道上面的场景重建。相机姿势和场景几何通过在多个图像匹配特征的自动识别时同时重建。这些特性从图像到图像,使初步估计摄像机的位置和对象坐标,然后使用非线性最小二乘法最小化(多个解决方案变得可用在图像数据库中广泛的特征; Snavely 2008 )。
不同于传统的摄影测量,从SFM得出的摄像机位置缺乏由地面控制坐标提供的规模和方向。因此,三维点云是在相对的图像空间坐标系统中生成的,这个系统必须与真实世界,“对象空间”坐标系保持一致。 在大多数情况下,SfM图像空间坐标转换为绝对坐标系统,可以通过使用一个三维相似变换,这个变换基于小的地面控制点(GCPs)与已知物体空间坐标。这样的GCPs可以推导出事后识别候选特征清晰可见的,生成的点云和领域,并通过地面调查获得他们的坐标(i.e.,使用GPS)。然而在实践中,常常容易部署高对比度和在获取图片之前就在该领域明确定义的重心的物理目标。这种方法简化了图像的明确协同定位和目标对象的空间,也在有兴趣的领域中保证了一个可靠的、均匀的目标网络,在SfM重建中使任何非线性结构的错误进行评估。它也是有用的在GCP网络中合并一定的冗余,在对抗目标区域可能出现的稀疏数据。
1.4 本文的目标
本文的目的是提供一个介绍SfM和使用方法的详细解释,说明生成一个完全呈现的3 d模型所需的步骤,从最初的获取摄影数据开始。这里的重点是勾勒一个实际的工作流,这个工作流可以被对部署SFM地貌学研究感兴趣的环境科学家和从业人员应用。为了达到这个目标,我们描述一个使用免费应用束SFMToolkit3( Astre 2010 )来处理照片和产生初始点云的工作流。这个包包含许多开源应用程序,包括在执行顺序,SiftGPU(Lowe, 1999, 2004)、打包机( Snavely et al .,2008 )、CMVS和PMVS2( Furukawa 和Ponce, 2007; Furukawa et al., 2010),如果需要的话,这些都可以独立运行。
在一系列对比鲜明的景观和地形中应用SfM,包括沿海峭壁,一个冰碛湖,规模较小冰川雕刻基岩山脊。重要的是,我们还对一个派生的地形模型,进行了详细的质量评估,这是在威尔士阿伯里斯特威斯一角300到300米的悬崖峭壁上进行的模型,,通过与来源于地面激光扫描测量的高分辨率地形模型进行比较。
2.方法
2.1 运动恢复结构工作流
2.1.1 图像采集和关键点提取
SfM的
全文共9001字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[154952],资料为PDF文档或Word文档,PDF文档可免费转换为Word



