基于图像识别的车量检测系统毕业论文
2020-02-23 18:20:21
摘 要
自提出智能交通系统(Intelligent Vehicle Highway System,IVHS)这一概念以来,交通信息的采集,尤其对动态实时信息的采集一直是重中之重。道路的车流量和机动车的实时速度一直都是交通系统关注的重要参数。本文围绕基于图像识别的的车量检测的相关技术展开,主要工作如下:
论文首先讲述对源图像进行预处理的相关操作,以及传统的目标检测算法:帧差法、光流法、背景减除法,结合它们的优缺点,最后决定用基于混合高斯模型的背景减除算法实现对运动车辆的检测和对道路背景的建模。
其次,为了实现测量车速这一功能,我们采用了基于Blob特征的运动目标跟踪方法实现对同一车辆的连续跟踪,该算法包含两个部分:估计目标在下一时刻将出现的位置,更新目标的跟踪队列。在实现预测目标下一时刻位置的过程中,我们结合系统将要应用到的实际情形的特点,对Kalman算法的流程与参数做出一定简化,提出了满足系统要求的目标跟踪算法。
最后,在目标检测和目标跟踪算法的支撑下,按照软件开发的流程:需求分析,概要、详细设计,编码实现,完成了基于图像识别的车量检测系统的开发。
关键字:运动目标检测;运动目标跟踪;车速测量
Abstract
Since the concept of the Intelligent Vehicle Highway System (IVHS) was proposed, the collection of traffic information, especially the collection of dynamic real-time information, has always been a top priority. The traffic flow of roads and the real-time speed of motor vehicles have always been important parameters for the transportation system. This thesis focuses on the related technology of vehicle detection based on image recognition. The main tasks are as follows:
The thesis first introduces some operations on the original image preprocessing, and the traditional target detection methods: frame difference method、optical flow method、background subtraction method.Comparing their advantages and disadvantages, I finally decided to choose the background subtraction method algorithm,which is based on the mixture Gaussian model,to realize the detection of moving vehicles and the modeling of road background.
Secondly, in order to realize the function of measuring vehicle speed, we use the tracking of the moving object based on the Blob feature to achieve continuous tracking of the same vehicle. The algorithm consists of two parts: predicting the position of the target at the next moment, and updating the tracked target queue. In the process of realizing position of the predicted target at the next time, we combine the characteristics of the actual situation that the system will be applied to simplify the process and parameters of the Kalman tracking algorithm, and propose a tracking algorithm that satisfies the system requirements.
Finally, on the basis of moving target detection and moving target tracking algorithm, according to the flow of software development: demand analysis, outline design, detailed design, coding implementation, I will complete vehicle detection system based on image recognition.
Key words:moving target detection; moving target tracking;
vehicle speed measurment.
目 录
摘 要 I
Abstract II
目 录 1
第1章 绪论 1
1.1研究背景和意义 1
1.2国内外研究现状 1
1.2.1国外研究现状 2
1.2.2国内研究现状 2
1.3本文主要工作和章节安排 3
1.3.1主要工作 3
1.3.2章节安排 3
第2章 对视频中物体检测的算法基础 5
2.1引言 5
2.2对图像的一些预处理 5
2.3物体检测的经典算法 6
2.3.1帧差法 6
2.3.2光流法 7
2.3.3背景减除法 8
2.4基于混合高斯模型的目标检测算法 8
2.4.1背景建模 8
2.4.2参数初始化 9
2.4.3背景更新 9
第3章基于Blob特征的目标跟踪算法 11
3.1Blob特征提取 11
3.2运动目标跟踪 12
3.2.1关联矩阵 12
3.2.2 Kalman跟踪 13
第4章基于图像识别的车量检测系统设计与实现 15
4.1基于图像识别的车量检测系统设计方案 16
4.1.1软件的需求分析 16
4.1.2软件设计 16
4.2基于图像识别的车量检测系统的实现 17
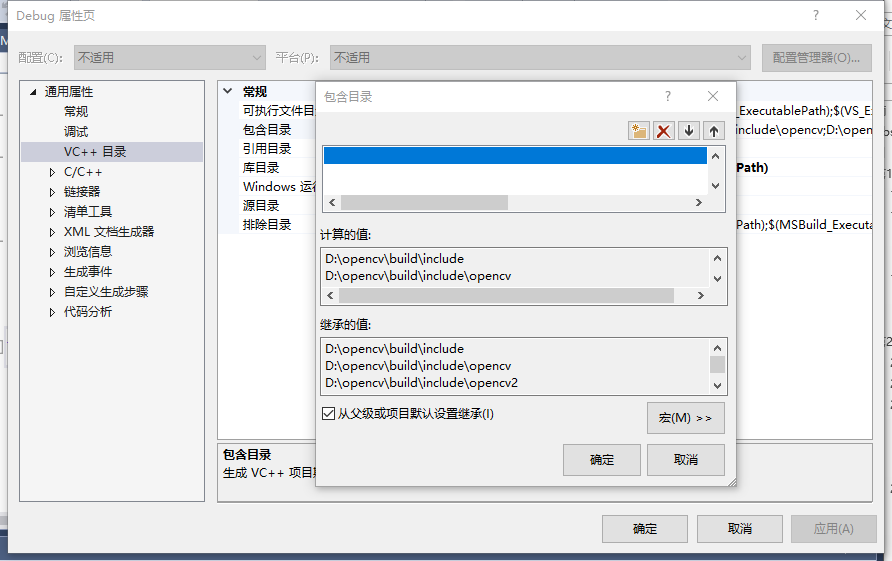
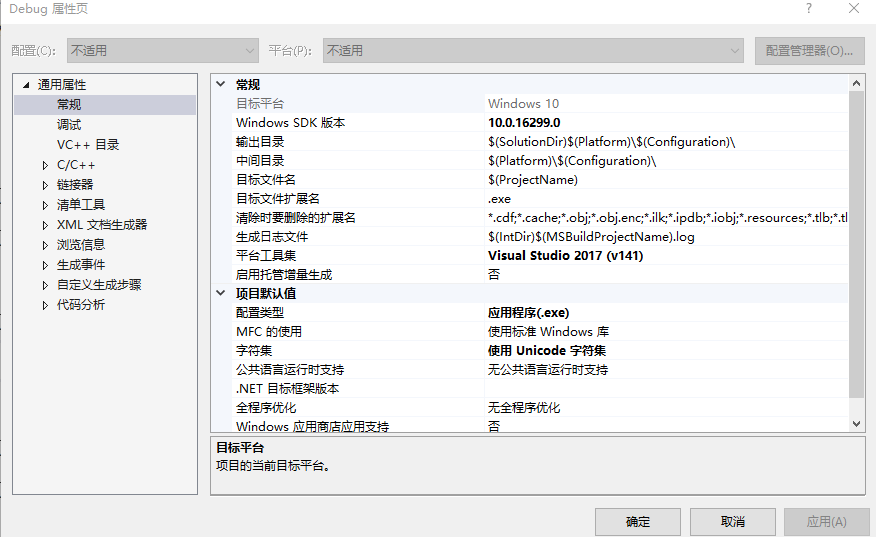
4.2.1开发环境的搭建 17
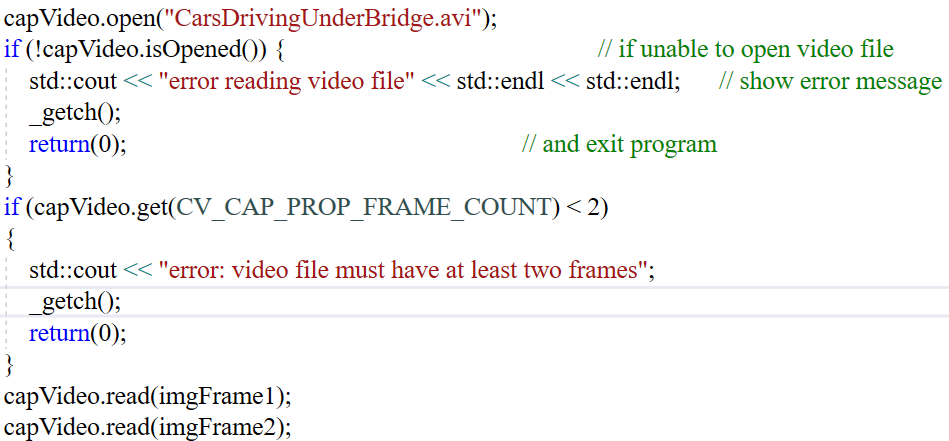
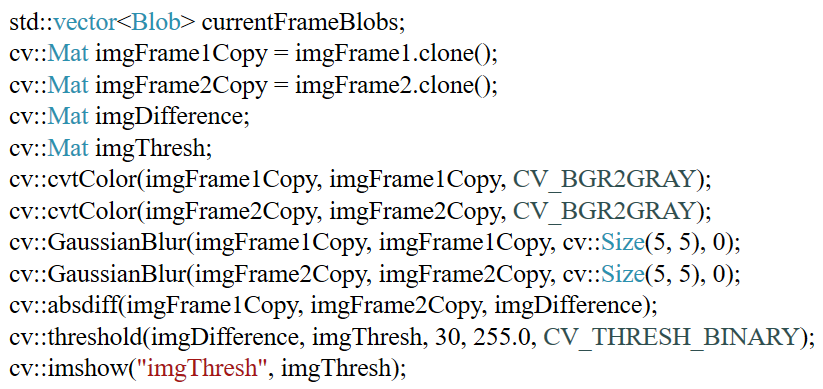
4.2.2视频输入模块和视频预处理模块的实现 19
4.2.3车辆检测模块的实现 20
4.2.4车辆跟踪模块和车辆测速模块的实现 21
4.2.5显示模块的实现 22
第5章总结与展望 24
5.1总结 24
5.2展望 24
参考文献 25
致 谢 26
第1章 绪论
1.1研究背景和意义
当今社会,一个城市想要实现经济的持续、健康、高速的发展,发达和畅通安全的道路交通系统是必不可少的,这也是一个城市现代化的唯一途径。随着经济的快速增长,人民生活水平不断提高,购买力和需求也不断提高。尽管汽车给人们的生活带来了很多的便利,但顺便也带来了一系列的麻烦:尾气排放造成的环境污染问题,车辆数目过多造成的管理困难和安全隐患问题,这些问题引起了社会的高度关注。为了解决这些问题,同时结合时下大热的智能化的趋势,一些人提出了智能交通系统(Intelligent Transport System,简称ITS)。智能交通系统旨在整合计算机技术、数据通信技术、传感器技术、电子控制技术、人工智能等先进技术,构建大规模、全面、实时、准确、高效的交通管理系统。智能交通系统的前身是智能车辆高速道路系统(IVHS),它可以有效解决各种交通难题,受到了国内外政府和技术人员的广泛关注与应用。ITS具有广泛的应用范围,如机场,高速公路交通管理系统,城市交通管理系统和客运分流系统。ITS的广泛使用对社会产生了积极的影响,例如:智能交通系统在一定范围内减少了机动车出行产生的尾气排放,降低了交通事故的数量,它减少了化石燃料的消耗,也为人们的出行带来了方便。
在智能交通系统中,交通信息的收集,特别是动态实时信息的收集一直是重中之重。道路的车流量,占道率,和机动车的实时速度一直都是交通系统关注的重要参数,因此建立车辆检测[1]和识别系统是智能交通系统的核心[2]。根据道路的实时车流量和占道率,合理的对车流进行分流与安排潮汐车道,对各类道路安排合适的限定速度,严格监控车速等将大大降低交通事故发生的频率和概率。
目前智能交通系统较常用的车辆检测方法有:环形线圈检测、微波雷达检测、超声波检测、红外检测、基于视频的检测[3]。基于视频的检测相比于另外几种检测方式,拥有对道路破坏与影响小、能持续稳定工作、检测效率和质量高、自动化程度高,节省人力等优点,因此受到广泛的关注和应用。
1.2国内外研究现状
基于视频的车辆检测系统,需要能够识别来自给定视频的移动车辆、标记车辆和跟踪、获得运动车辆的位移和数量信息、通过视频帧数计算出运动时间进而得出运动车辆的平均速度。接下来,主要概述了国内外车辆检测、车辆跟踪、车速测量等相关技术的研究现状。
1.2.1国外研究现状
在国外,计算机视觉发展的历史可以追溯到1966年。那一年,一个非常著名的人工智能专家马文·明斯基,在1966年的夏天,为他的学生安排了一个非常有趣的暑期工作,让学生在电脑前连接摄像头,然后编写一个程序,让计算机告诉我们相机看到了什么。20世纪70年代,美国首先开始基于计算机视觉的车辆视觉检测研究,并最先提出智能交通系统。第一次将计算机视觉图像处理用于道路交通的运动目标车辆检测的是位于加利福利亚州帕萨迪纳的喷气推进实验室。1978年,实验室提出了一个可行的解决方案,使用计算机视觉处理而不是传统的交通监控系统。随后,越来越多的相关研究人员投入了基于计算机视觉的车辆检测研究[4]。1984年,Abramczuk研究用虚拟检测线对车辆进行检测,从而测得车辆的速度[5]。在20世纪90年代,欧洲许多国家开始研究基于视频监控的智能交通系统,其中英国开发的Trafficmaster系统[6]可以对道路上的车辆的速度和车流量进行实时的监控,来辅助交通管理。2000年,日本加大对智能交通系统的投入与研发力度,并取得了一系列成果:(1)对驾驶员有利的导航系统。通过将道路的畅通情况,路线所需时间,交通管制情况以及停车位空满情况提供给驾驶员,辅助驾驶员采取最佳的行动;(2)公路自动收费系统。日本为此安装了不停车收费系统(ETC),通过基于DSRC的交互通信将车辆与道路关联,IC卡与车道上的ETC设备交互,记录消费信息,在接下来几年里,将ETC普及到全国的收费站。随着对ITS研究的不断深入,各种技术和解决方案如雨后春笋纷纷出现。Kavehvash提出了基于多摄像头的智能交通监控系统[7]的解决方案。Gudigar A提出了对道路交通标志的检测与识别方案 [8]等。
1.2.2国内研究现状
我国关于基于视频的目标检测的基础研究还很薄弱,但是许多研究机构和科研人员已经投入运动目标检测与识别的研究。中国科学院自动化研究所分别于2005年和2006年举办了两次全国智能视频监控研讨会,组织国内专家进行学术交流。中国科学院自动化研究所模式识别国家重点实验室的视觉监控处于国内领先地位,并根据其理论,独立开发了具有完全知识产权的交通监控原型系统。2014年,杨后超在车辆跟踪方面,根据同一辆车在相邻帧中大小与位置相似的特点以及据质心偏移原理采用了外接矩形框的跟踪方法。但在跟踪过程中在车辆间近距离发生相对静止行驶时,系统会产生一定的偏差,且若在白天条件下车上附有的红色信息超过一定的界限时,可能会导致整个系统错误地切换到夜间检测状态,存在切换过程中的误差[9]。2015年,孟凡清针对基于SIFT和SURF特征的目标跟踪算法存在的实时性差、计算量大等问题,提出了一种基于ORB的运动目标跟踪法。首先对检测到的运动目标进行ORB特征提取并在帧间进行匹配,最后再结合提纯后的特征点完成目标特征的更新及定位。但当匹配合适的特征较少或者目标本身特征点较少时,该算法精确度便会显著降低[10]。2016年,白天等人提出了一种基于类型识别与轨迹分析的车流量统计算法。该算法通过对检测到的运动目标进行跟踪从而获得相应的车辆目标轨迹的集合,再通过支持向量机对得到的运动目标轨迹与该目标实施学习与鉴别,之后再对真实的轨迹以及相应运动目标的数量进行统计实现对车流量的计数。该算法能够适应黑夜及其他光线环境较为复杂的场景,鲁棒性强,但是需对各个运动目标的轨迹数据进行记录,因此具有处理速度较慢,实时性较差的劣势[11]。
1.3本文主要工作和章节安排
1.3.1主要工作
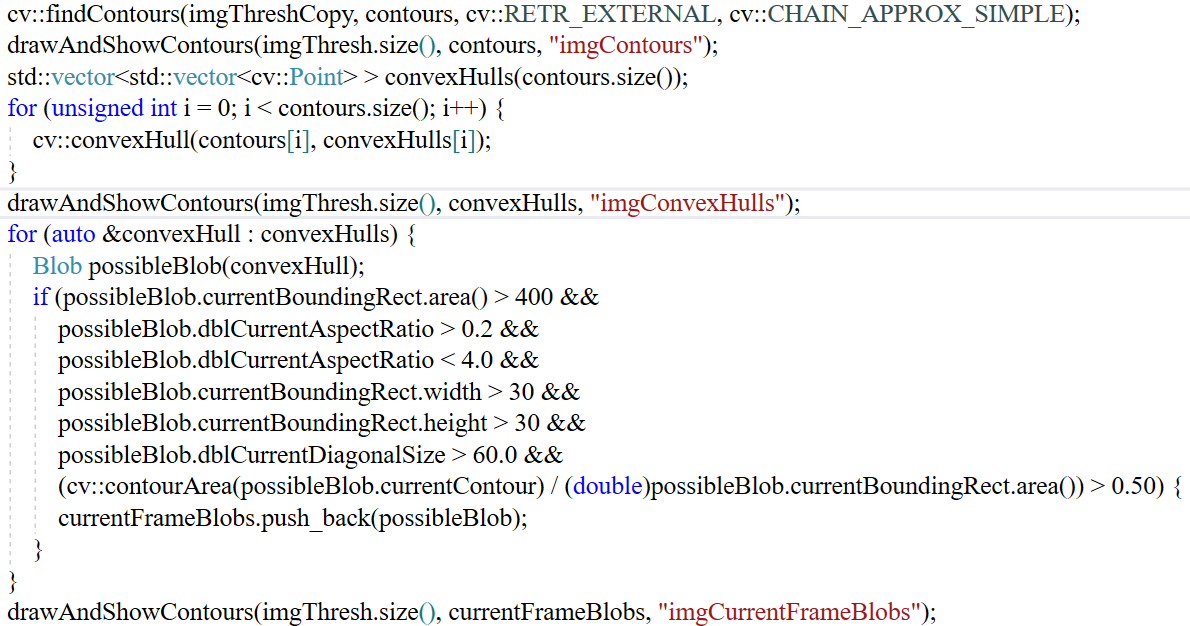
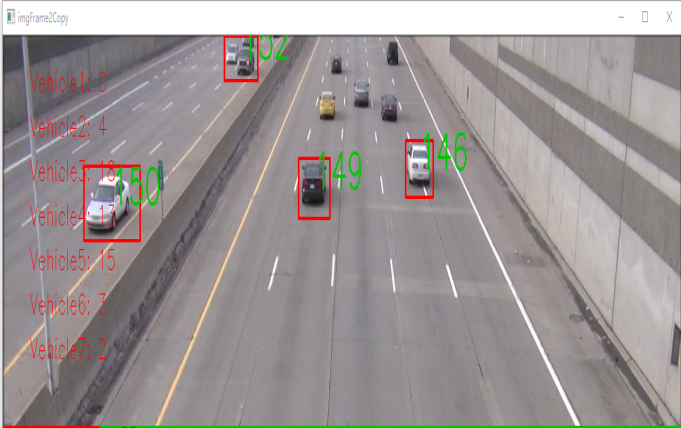
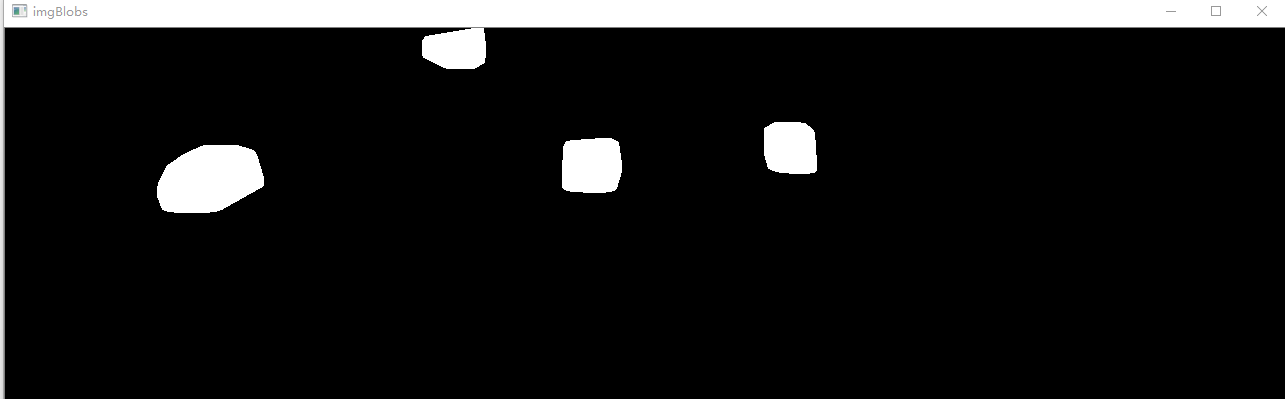
本文的目标是实现基于视频的车量检测系统,完成预期的车流量检测、车道占用率检测以及车速检测这三个功能,在时间充裕的条件下,将以上三个功能统计的数据用可视化表格的方式呈现出来,同时,在视频清晰度允许的情况下将识别出的车辆进行分类(大型车、小轿车、非机动车)。该系统主要涉及图像预处理、运动目标检测、运动目标跟踪三个方面。本文拟采用计算机视觉中的Blob特征检测原理来达到跟踪运动目标的目的。Blob中文含义包括“一滴”,“一抹”,“一团”,在计算机视觉中,Blob是指图像中的具有相似颜色,纹理等特征所组成的一块连通区域,因此Blob特征检测又叫团块检测,它的作用就是将一个经过预处理的图像,通过检测“灰度突变”,将图像中的所有Blob检测出来,然后预测某一Blob的下一位置,并将其与下一帧的所有Blob相比较,找到与预测距离最近的Blob,即实现对同一物体的跟踪。
1.3.2章节安排
本文的章节安排如下:
第1章为绪论,介绍基于图像识别的车量检测系统的研究背景、意义、国内外研究现状。
第2章讨论检测运动车辆的算法。首先介绍对原始图形的预处理过程,然后介绍了三种常见运动目标检测算法:帧差法,光流法,背景减除法。接下来是讲述如何使用混合高斯模型对背景建模。
第3章论述跟踪运动车辆的算法。首先介绍Blob特征提取,然后在Kalman跟踪算法的基础上,对其做出一定简化提出基于Blob特征的运动目标跟踪算法。
第4章是系统的设计与实现,详细地介绍系统实现的流程和各个功能模块的实现过程,并展示完成后的系统。
第5章为总结,对整篇论文工作进行总结。
第2章 对视频中物体检测的算法基础
2.1引言
本文的目标是完整描述实现基于图像识别的车量检测系统的过程,为了该系统的实现,可以按照功能将它划分为:运动物体(车辆)检测、运动物体(车辆)跟踪两大部分。只有将视频或者图像中行驶的车辆准确的识别出来,才能交给后续的运动车辆跟踪模块去处理,因此在第2章先介绍与运动物体检测相关的形态学处理和相关的检测算法。
2.2对图像的一些预处理
在原始的视频图像中,我们感兴趣的只是运动物体,但是占据图像绝大部分的却可能是我们不感兴趣的背景区域,这些冗余的信息如果我们不进行预处理,会在后面的运动物体检测时,大量浪费系统资源,严重降低系统效率,甚至直接影响物体检测的结果,所以提供给用来检测运动物体的图像必须是原始图像经过处理和变换后的图像。
灰度变换[12]是根据一定的目标条件,按照一定的变换关系逐点变化图像中每个像素的灰度值的方法,这么做的目的是改善图像质量并使图像显示更清晰。灰度变换往往放在图像预处理的第一步,以便向后续预处理步骤提供高质量成像效果的图像,按照变换函数是否线性,将灰度变换分为线性变换和非线性变换。在实现该系统的过程中,通过直接调用openCV库中的cvCvtColor()函数对每一帧图像进行灰度处理,它的实现原理为公式2.1。
(2.1)
cb=0.299 cg=0.587 cr=0.144
dst[i]是处理后图像的第i个像素点的亮度值
src[i][0]是源图像的第i个像素点的B通道的值
src[i][1]是源图像的第i个像素点的G通道的值
src[i][2]是源图像的第i个像素点的R通道的值
由公式2-1可知,通过cvCvtColor()函数进行的灰度转换是线性转换。
说到高斯滤波,就不得不先提及卷积,计算机视觉中的卷积是指一个像素点的值由它周围的像素点乘以相应的权值然后求和决定。高斯滤波就是用一个核对图像中的每一个像素点进行卷积运算,处理的值为像素的灰度信息,其目的是降低高斯噪音,实现线性平滑。在本文中的应用就是检测出图像中的车辆轮廓,同时降低车辆的影子对检测车辆轮廓的干扰。
背景是在任何感兴趣的时间段内,静止在场景中或周期性运动的目标;前景,则是指在感兴趣的时期,场景中运动或者我们感兴趣的目标。在交通系统中路面是背景,运动的车辆是前景。如果可以创建背景模型,将背景模型和当前图像进行比较,然后减去已知背景信息,则剩余的大致为所需的前景目标。
图像分割[13]是指将图像划分为彼此独立的特定区域并从中提取感兴趣的对象的过程。按照分割方法,可将其分为基于阈值的分割方法、基于区域的分割方法、基于边缘的分割方法以及基于特定理论的分割方法。本文采用基于阈值的分割方法,更具体的说,灰度值被用作图像分割的阈值。原理如公式2.2。
(2.2)
其中T是阈值,对象的图像元素g(i,j)等于1,并且背景的图像元素g(i,j)等于0。因此,阈值分割算法的关键是确定阈值。在确定阈值之后,将阈值逐个与像素的灰度进行比较,并且可以并行地对每个像素执行像素分割,分割的结果直接给图像区域。
2.3物体检测的经典算法
2.3.1帧差法
帧差法是对两个相邻帧中的相应位置上的像素执行差分操作,如果差值大于我们设置的的阈值,则认为运动因子存在,并且相应的像素被提取为运动目标的一部分,流程如图2.1所示。

以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: