基于大数据的可用停车位预测方法研究毕业论文
2020-02-23 18:20:41
摘 要
经济迅猛发展,大众出行方式日益多样,汽车数量大幅增长,停车位不足成为交通难题。可用停车位预测是城市智能交通中停车引导系统的关键技术,有助于驾驶员高效地选择停车场地以及规划行车路线。针对该问题,国内外现有的预测方法研究重点在于短期预测,但对未来一段时间内停车场可用停车位变化趋势的预测远比实时获取可用停车位数量重要。因此需要建立短期、及长期预测的可用停车位预测模型。
本文的数据来源为武汉市某医院地下停车场的停车数据,基于大数据平台技术,对可用停车位时间序列进行数据特征的统计与分析,提出基于长短期记忆(Long Short-Term Memory, LSTM)神经网络的可用停车位单步和多步预测模型,并进行与传统模型的对比,从而表明所用模型在预测性能上的优势。探讨多步预测法常见的两种策略,分析两者的理论特征及各自优缺点,提出实际应用中的适用场景,为多步预测方法研究提供了理论支持。
基于可用停车位数据进行仿真实验,实验结果表明基于LSTM神经网络的可用停车位单步预测模型在预测精度和稳定性上表现更优,在多步预测上也体现了较好的预测性能。
关键词:可用停车位;大数据平台;长短期记忆;神经网络
Abstract
With the continuous development of urban construction in China, residents’ demand for travel has increased and the number of urban vehicles has increased dramatically. The shortage of parking spaces has become a major problem for urban transport. Predicting the available parking space technology is the key technology of intelligent parking guidance system in urban intelligent transportation, which plays an important role for drivers to efficiently and reasonably select parking lots and plan their driving routes. With regard to this issue, the existing forecasting methods at home and abroad focus on short-term forecasting, but it is more important to predict the changing trend of parking spaces available in parking lots than in real-time. Therefore, it is necessary to establish a parking prediction model with single-step and multi-step prediction functions.
The data source of this article is the parking data of an underground parking lot of a hospital in Wuhan City. Based on the big data platform technology, the data characteristics of available parking space time series are analyzed. A single-step and multi-step prediction model of available parking spaces based on Long Short-Term Memory (LSTM) neural network is proposed and compared with the traditional model, which validated the advantages of the model used in prediction performance. The multi-step prediction scenarios of the iterative method and the direct method are discussed. By analyzing the theoretical characteristics of the two methods and their respective advantages and disadvantages, the applicable scenarios in the practical application are put forward, which provides certain theoretical support for the research of multi-step prediction methods.
Based on the available parking space data, simulation experiments are performed. The experimental results show that the LSTM neural network-based parking space single-step prediction model performs better in prediction accuracy and stability, and it also shows better prediction performance in multi-step prediction.
Key Words: Available parking space;Big data platform;Long Short-Term Memory;Neural Networks
目 录
第1章 绪论 1
1.1 研究背景 1
1.2 研究意义 1
1.3 研究现状 2
1.3.1 短期预测 2
1.3.2 长期预测 3
1.4 研究内容 3
1.5 论文结构 4
第2章 数据特征分析 5
2.1 数据挖掘工具 5
2.2 数据预处理 5
2.2.1 数据源介绍 5
2.2.2 数据筛选 6
2.3 数据基本特征分析 7
2.3.1 数据规律性 7
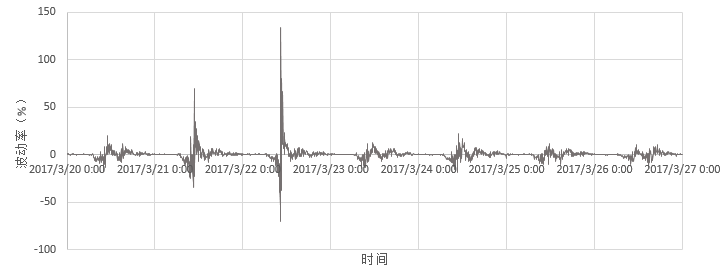
2.3.2 数据波动性 7
2.4 数据的周期性分析 8
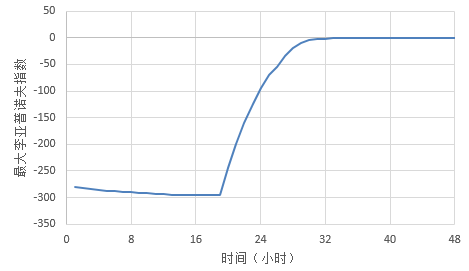
2.5 数据的混沌性分析 9
第3章 可用停车位单步预测方法研究 11
3.1 LSTM神经网络 11
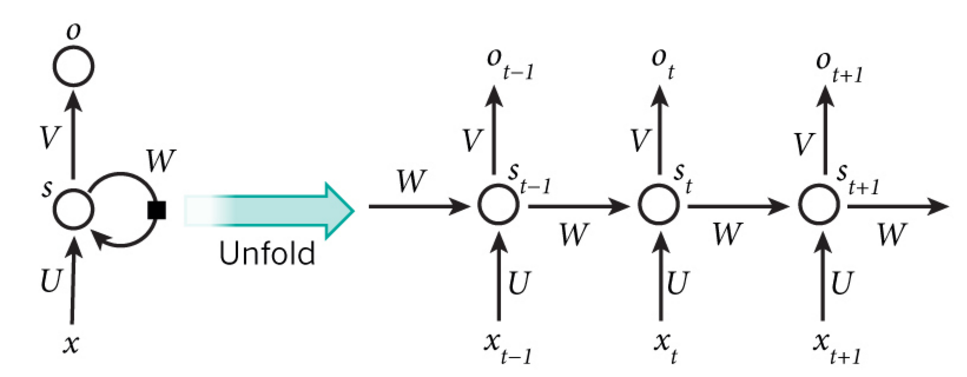
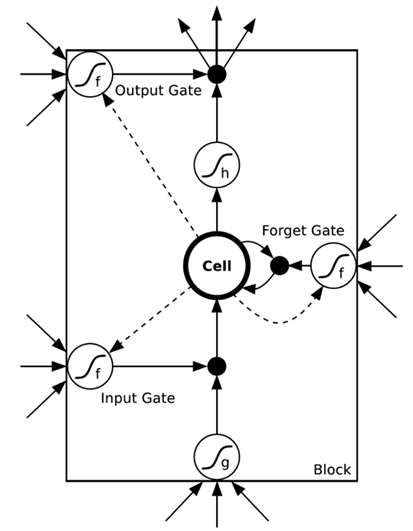
3.1.1 LSTM神经网络的基本结构 11
3.1.2 LSTM神经网络的关键参量 13
3.1.3 LSTM神经网络预测算法 14
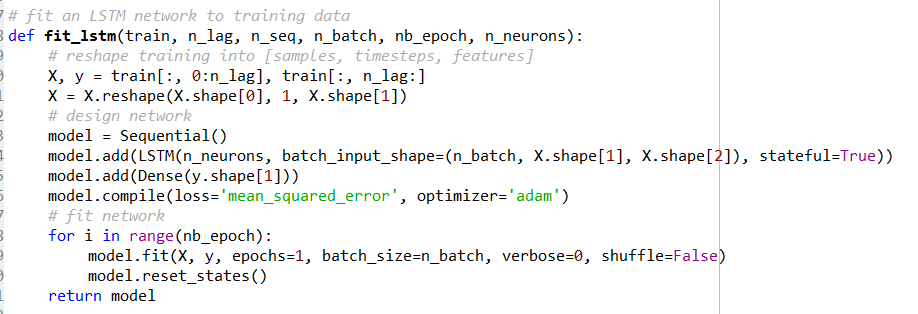
3.2 基于LSTM的可用停车位单步预测模型 16
3.2.1 基于LSTM的单步预测模型构建 16
3.2.2 模型预测性能的评价方案 16
3.3 基于LSTM的可用停车位单步预测模型实现 17
3.3.1 单步预测模型的实现 17
3.3.2 单步预测实验结果分析 18
3.3.3 影响模型性能的因素 20
第4章 可用停车位多步预测方法研究 22
4.1 多步预测方法原理 22
4.2 基于LSTM的可用停车位多步预测模型 22
4.3 多步预测实验结果分析 23
第5章 总结与展望 25
5.1 本文研究内容 25
5.2 未来工作展望 25
参考文献 26
致 谢 28
第1章 绪论
1.1 研究背景
随着经济的发展与人口的急剧增长,居民的出行需求与出行方式也逐渐发生了变化,使城市汽车使用量大幅增长。这对交通和环境造成了一定的危害,城市交通出现了一系列难题,交通严重拥堵,交通设施不足等问题。
据统计,截至2017年,我国汽车数量达2亿辆,并以月均百万辆的趋势增长,停车位的供需之间存在严重不平衡。造成“停车难”的另一个原因是未能有效利用停车信息。
发展智能交通刻不容缓。为了以网络化、智能化技术高效地管理停车场,改善城市交通状况,智能交通系统应运而生,其中停车引导系统(Parking Guidance Systems,PGS)是重要的组成部分之一[1]。停车引导系统可帮助驾驶员快速找到符合当时场景的可用停车位,不仅节省驾驶员的时间又缓解了交通压力,大量应用于医院、商业圈等的大型停车场。
合理有效地决策,依赖于实时准确的数据与数据特征。目前,智能停车引导系统以实时数据为主要数据源,可用停车位(Available Parking Spaces, APS)的预测方法可以为智能引导提供下一时刻的灵活的数据。
1.2 研究意义
智能终端已成为各种行业服务的接口,包括餐饮、购物、导航、就医、出行等。由于驾驶员希望通过终端查询可用停车位以避免自己到达停车场后出现停车位全满的情况这一需求,智能引导系统不能只统计实时的可用停车位,停车场中车辆的数量可能会在短时间内发生明显变化,因而,通过停车场内停车位数量的变化趋势,动态预测未来某段时间内的停车位,更有助于用户做出适合当时所处场景的停车位置选择。
对于医院、商场附近的停车场来说,预测未来某段时间的可用停车位,从而准确引导驾驶高效地停放车辆,这有利于附近道路上的车辆分流,缓解交通拥塞,避免交通隐患。同时,有效管理车辆,提高社会经济效益。
实时预测停车位可提前告知驾驶员哪里有合适的位置,如果可用停车位的有效预测时间长,那驾驶员有机会前往该停车位。但停车场内的停车位数量可能时刻发生变化,因此,精准提供实时停车位数已不能满足智能交通引导的要求。例如,在繁华路段,经常出现驾驶员在前往停车场的路程中,查询到停车位数较多,但当其到达目标停车场时停车位已满,这使得驾驶员不得不离开当前位置,继续寻找其他有停车位的地方。从符合交通动态特点的角度考虑,对未来时间段内可用停车位变化趋势预测的重要性远大于实时获取可用停车位数量。因此需要建立可用停车位单步、多步预测模型,使驾驶员做出更优选择。
大数据平台技术逐渐成熟、“互联网 交通”日益兴起,利用新技术研究可用停车位的预测具有重要的现实意义。在交通繁华路段,智能引导系统通过对周边停车场可用停车位数量的预测,并参考停车费用、交通状况等因素,帮助驾驶员寻找合理的停车位与前往路线,有效避免了低效停车。这对于提高城市交通管理的信息化、智能化水平有着一定的积极作用,也有助于居民交通出行的便利。降低交通事故,改善空气环境,对建立更加完善的交通体制有一定的指导意义。
1.3 研究现状
考虑到上述分析的实际情况,将可用停车位预测方法分为单步(短期)预测和多步(长期)预测。单步预测是对未来时间点数值的预测;多步预测是向前预测多步,即对预测范围内多个时间点的数值预测。
1.3.1 短期预测
国内外很多学者对可用停车位的单步预测开展过一些研究,预测方法有传统的时间序列预测,如ARIMA模型、马尔可夫分析法等,此外还有神经网络、遗传算法等启发式算法。
传统时间序列预测方法是依据数据的变化趋势,通过历史数据和当前数据预测下一段时间的数据。Dunning等人以ARIMA模型预测停车位,实验发现停车场可用停车位较多时,模型的预测精度高,停车场的可用停车位减小时,预测精确度开始下降[2]。Ji在此基础上进一步研究,将ARIMA模型、马尔可夫模型和小波分析理论结合起来,小波分析分解原始数据,再分别预测低频信号和多个高频信号,并将混沌时间序列应用于预测方法中,通过混沌分析挖掘可用停车位时间序列的规律[3]。Rajabioun等人提出一个多变量自回归模型,其创新之处在于考虑停车可用性的时间和空间相关性[4]。许增昭依据可用停车位的变化规律,对马尔可夫法和GM(1,1)的适用情景进行对比讨论,在短期预测工作基础上,构建灰色马尔可夫模型以预测停车场的可用停车位[5]。
启发式算法利用部分信息对计算结果进行学习、再推理,包括模拟自然界中某些生命体的行为方式。曹智慧[6]和高广银[7]等人构建BP神经网络模型预测停车场的可用停车位数量,改变神经元数、调整自学习速率等方式来优化神经网络,提升模型的预测性能。郑喆等人提出了基于DBN-SVR模型的短期预测方法,运用差分处理法减弱数据的趋势性,反差分处理预测值,提升了预测精度[8]。张军等人采用粒子群优化算法初始设定小波神经网络模型参数,并以基于梯度的方法训练小波神经网络,最终停车场可用停车位预测效果得到显著提升[9]。
1.3.2 长期预测
在可用停车位时间序列预测这一研究领域,国内外学者的研究主要集中在短期预测。多步预测研究相对较少,因为多步预测需要考虑诸多难点,比如误差累积、精确度降低和不确定性提高[10]。但多步预测可以为驾驶员提供更加可靠且持久的信息。
Liu等人依据混沌时间序列的特征,提出加权一阶局域法来预测可用停车位,实现可用停车位的迭代多步预测[11]。姜桂艳等人结合小波分析理论、BP神经网络模型和自适应指数平滑法,根据上一时刻的预测误差值来分配各个模型在混合模型中所占权重,构建了交通参数的单步、多步混合预测模型[12]。杨飞构建了多个基于回声状态网络的短时交通流预测模型,且各模型在训练速率和稳定性等方面都有显著提升[13]。
综上所述,可用停车位预测方法研究已经得到了国内外学者的广泛关注,取得了一定的研究成果,但仍需深入研究与进一步改进。考虑交通行车的实际情况,本文研究了更符合实用场景的可用停车位的单步、多步预测模型,并验证了新模型具有显著的预测性能。
1.4 研究内容
本文通过对可用停车位时间序列的数据特征统计与分析,挖掘数据本身存在的变化规律,进而提出基于LSTM神经网络的可用停车位单步、多步预测模型,并验证新模型具有良好的预测效果。最后总结本文研究内容。
本文的研究主要在以下几个方面:
(1)多角度分析可用停车位时间序列特征
首先对可用停车位的原始数据进行观测与基本特征分析,统计可用停车位数据的周期性与随机性;进一步对可用停车位进行周期性分析,发现工作日的可用停车位数据与周末的存在不同变化规律,帮助合理划分、选取训练集;分析数据的混沌性,为多步预测模型提供理论支持。
(2)提出可用停车位单步预测模型
构建基于LSTM可用停车位单步预测模型,优化输入层、输出层、隐含层的节点数,训练得到适合的可用停车位预测模型。最后,将得到的可用停车位预测模型对比于传统算法,分析它们的预测性能。
(3)提出可用停车位多步预测模型
构建基于LSTM可用停车位多步预测模型,将其与传统算法做比较,验证它们的预测效果。最后分析迭代法和直接法在多步预测领域的适用场景。
1.5 论文结构
本文研究的出发点是以数据驱动进一步改进网络训练方法,分析数据的内部特征,利用时间序列数据中的中长距离信息依赖的特点,减小APS预测模型需要的数据维度。进而利用LSTM神经网络改善可用停车位预测方法对精度等方面的性能要求。本文共有5个章节。章节内容如下:
第1章是绪论。本章介绍了本文的研究背景与研究目的,可用停车位单步和多步预测方法的研究现状,并简要概述了本文的研究内容和各章节安排。
第2章是对可用停车位的数据特征的统计与分析。从多个角度挖掘数据本身的内在特征,分析的结果为后文训练集的选取和预测模型的建立提供了重要的理论基础。
第3章首先介绍了LSTM神经网络的基本结构、关键参数等,然后提出了基于LSTM神经网络的可用停车位单步预测模型。并将新模型对比于其它传统模型,验证提出的新模型在预测精度和稳定性等方面表现更优。
第4章提出了基于LSTM神经网络的可用停车位多步预测模型。在多步预测上采用了直接法和迭代法两种策略,并讨论了两者的适用场景。
第5章总结了本文的主要研究内容,并对可用停车位预测下一阶段的工作提出合理的展望。
第2章 数据特征分析
2.1 数据挖掘工具
伴随数据的爆发式增长,众多行业领域迎来新的机遇与挑战,传统的数据库平台已经不能满足这些数据的海量存储与深度复杂的处理分析。随着大数据时代的到来,如何高效合理地挖掘数据潜在价值逐渐成为智慧城市的聚焦点,从数据中洞察变化趋势、提取可用价值,是现阶段所有行业领域都关心的问题。
新的数据分析技术也随之应运而生。Hadoop分布式技术为数据的处理、计算与分析提供了新的技术手段。TipDM作为顶尖的数据挖掘平台,目前已集成数十种预测算法和分析技术,可实现数据分析、数据预处理、数据建模等功能。Python在数据挖掘领域,提供了具有数据处理、分类、预测等功能的众多扩展库,如NumPy、SciPy、matplotlib等科学计算库,可以说Python是数据挖掘的最常用语言之一。
2.2 数据预处理
获取停车场可用停车位数据的方式多种多样,最简单的方法是通过记录停车场显示屏上的数据获取可用停车位数。但其缺点是获取数据的周期过长,在单位时间内实验数据少。本文中,数据来源于合作的多家停车场,可以直接访问停车场信息数据库来获取可用停车位数量。在实验前期,需要先处理数据,以便让数据更易存储、搜索和使用。通过对数据的标准化处理,清洗无效数据,提高数据的可用性。
2.2.1 数据源介绍
部分停车原始数据如图2.1所示。
|
 图2.1 部分停车数据示例图
图2.1 部分停车数据示例图停车数据表中的部分字段如表2.1所示。
表2.1 部分重要数据字段
字段序号 | 字段名称 | 数值类型 | 字段含义 |
1 | id | bigint(18) | 记录编号 |
2 | node_id | smallint(5) | 节点编号 |
3 | agent_id | bigint(18) | 所属运营商 |
4 | region_code | varchar(12) | 地区编码 |
5 | park_code | varchar(12) | 停车场编号 |
6 | parkname | varchar(50) | 停车场名称 |
7 | cartype | tinyint(4) | 车型 1-大型车 2-中型车 3-小型车 4-其他 |
8 | car_id | varchar(10) | 车牌号 |
9 | carnocolor | varchar(10) | 车辆颜色 |
10 | iotype | tinyint(2) | 车辆进(出)停车场 1-进场 2-出场 |
11 | time | bigint(20) | 车辆进(出)时间 |
12 | seatnum | int(10) | 可用停车位数量 |
13 | operno | varchar(18) | 操作人员身份证号 |
2.2.2 数据筛选
数据清洗是数据预处理过程中必要的前期处理,将初始数据输入到数据过滤器中,以一定的清洗规则删除不符合要求的数据,得到合格的数据。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: