通过神经网络和拟合的样本线,识别和分类控制图中单个和并发的非自然模式外文翻译资料
2022-11-22 13:12:08

英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
目 录
通过神经网络和拟合的样本线,识别和分类控制图中单个和并发的非自然模式
S.A. Lesany, A.Koochakzadeh and S.M.T. Fatemi Ghomi
Department of Industrial Engineering, Najafabad Branch, Islamic Azad University, Isfahan, Iran;
Department of Industrial Engineering, Qom Branch, Islamic Azad University, Qom, Iran;
Department of Industrial Engineering, Amirkabir University of Technology, Tehran, Iran
摘要:在Schewhart的控制图表中,对非自然和重要模式的正确、及时的识别和分析是非常重要的,因为它们提醒了失控的情况。实际上,当识别出控制条件时,模式提取增加了图表的灵敏度。人工神经网络由于其在模式识别上的高效率,在许多研究中被用来识别非自然的模式。在大多数这样的研究中,高度敏感的模式被误分类的风险很大。更明确地说,提出的模型为识别低参数系数的模式是错误的。该研究为使用LVQ和MLP网络的过程控制图的基本模式识别和分析提供了一个模型,并进行了拟合线分析。在此模型中,不仅在不同的灵敏度等级上存在误分类的风险显著降低,而且当基本模式同时发生时,也会有识别和分析的可能性。通过仿真验证了该模型的有效性和有效性。
关键词:过程控制图;模式识别;神经网络;拟合
1.介绍
Schewhart的控制图表是统计过程控制(SPC)最重要的工具,这些图表使不可避免的波动和质量特征能够在适当的时间范围内得到控制和监督。在第一眼看到控制模式时,如果没有看到外部控制范围内的样本,则认为该过程是控制的。这一传统的结论能够在一定程度上满足需求;然而随着重要模式的逐渐引入,这样的分析和结论不再足够。换句话说,即使所有的点都在控制范围内,重要的模式仍然可以表达这个过程已经失去控制的事实。因此模式识别被认为是图表灵敏度增强的最重要的规则之一。事实上,非随机行为和重要模式的出现,提醒我们在生产过程中有一些不可忽视的波动。此外,由于Schewhart的控制图表仅依赖于最后一个样本的数据而不考虑连续数据,因此对行为模式的准确、即时的识别和分析似乎是至关重要且不可避免的。值得一提的是,控制图中模式识别的概念对于所有样本的控制限制都是一样的。更明显的是,如果样本是不同的大小,并且对每个样本分别计算控制限制,行为模式和它的模拟将不再有意义(Grant和Leavenworth 1996)。
在文献中作为基本模式,在大多数控制图表中都有与过程相关的基础,并形成了定性特征;基本模式可以是单一的或同时出现的(参见图1)。各种因素可能导致非自然模式的形成:例如新操作符、新生产方法、新机器和对不同的检验方法和标准所做的变更是一些转变模式(Montgomery 2001)。工具的逐渐磨损和季节性的影响是导致趋势模式的一些因素(Montgomery 2001)。环境变化,如温度变化、操作者的疲劳、操作人员的连续移动或与生产机械相关的任何变量都会引起循环行为(Montgomery 2001)。
为了识别和分析控制图表中的非自然规律,针对最小化模式误分类的风险,提出了许多研究研究。2005年,Yang 和 Yang提出了一种基于统计相关系数的模型来识别控制图中的模式(Yang and Yang 2005)。Lin、Guh和Shiue(2011)提出了支持向量机(SVM),用于在线实时识别非自然模式。
在最近的研究中,人工神经网络因其对模式识别的能力而得到广泛应用:Pham和Oztemel(1994)使用LVQ网络对非自然模式进行分类;Cheng(1995,1997)定义了多层网络,模拟了工艺标准偏差和平均值的波动情况;Hwarng(1995)开发了一个模型,反向传播(BP)算法,分析了一个简单的周期模式,所提议的网络的输出是根据标准偏差调整;Chang和Aw(1996)使用了带有模糊视图的神经网络来识别,对各种生产过程中的平均波动进行分类;Anagun(1998)设计了一种基于神经的模型,统计过程控制中的模式识别网络。
Guh和Hsieh(1999)设计了一个模型来识别控制图中的非自然规律,他们的研究提出了一种与基本模式相对应的参数估计方法。Guh等人(1999)提出了模型中一些模式的错误分类,然后是一个解决方案。Guh和Tannock(1999)提出了一种基于感知器网络和BP算法的模型,以识别并发模式,该网络模拟了一些基本模式的同时发生。Guh(2004)提出了一种基于遗传算法的前馈神经网络,利用遗传算法对控制图模式进行识别。Guh(2005)引入了一种混合模型,它由一些感知器网络和一个专家系统组成,除了对基本模式的识别和分析外,还在很大程度上解决了模式错误分类问题。Guh(2010)提出了一个使用神经网络的模型,该模型同时控制平均图表和距离图。
Chiu, Chen和Lee(2001)使用BP和AR(1)时间序列模型设计了一个感知器网络,以识别过程参数值的变化。他们的研究结果表明,神经网络在区分基于标准偏差的变化速率方面非常成功,而传统的控制图表不能识别相同的过程变化。Pham和Sagiroglu(2001)通过设计多层感知器(MLP)网络,通过设计多层感知器(MLP)网络来识别过程控制图表模式,对四种训练方法的机理进行了比较研究,分别是BP、QP (Quick Prop)、DBD (Delta Bar Delta)和EDBD(扩展的Delta Bar Delta)。根据他们的研究结果,BP是在这一领域设计的感知器网络的最佳训练算法(Pham和Sagiroglu 2001)。Chen,Lu和Lam(2007)提出了一个组合模型来识别并发模式。
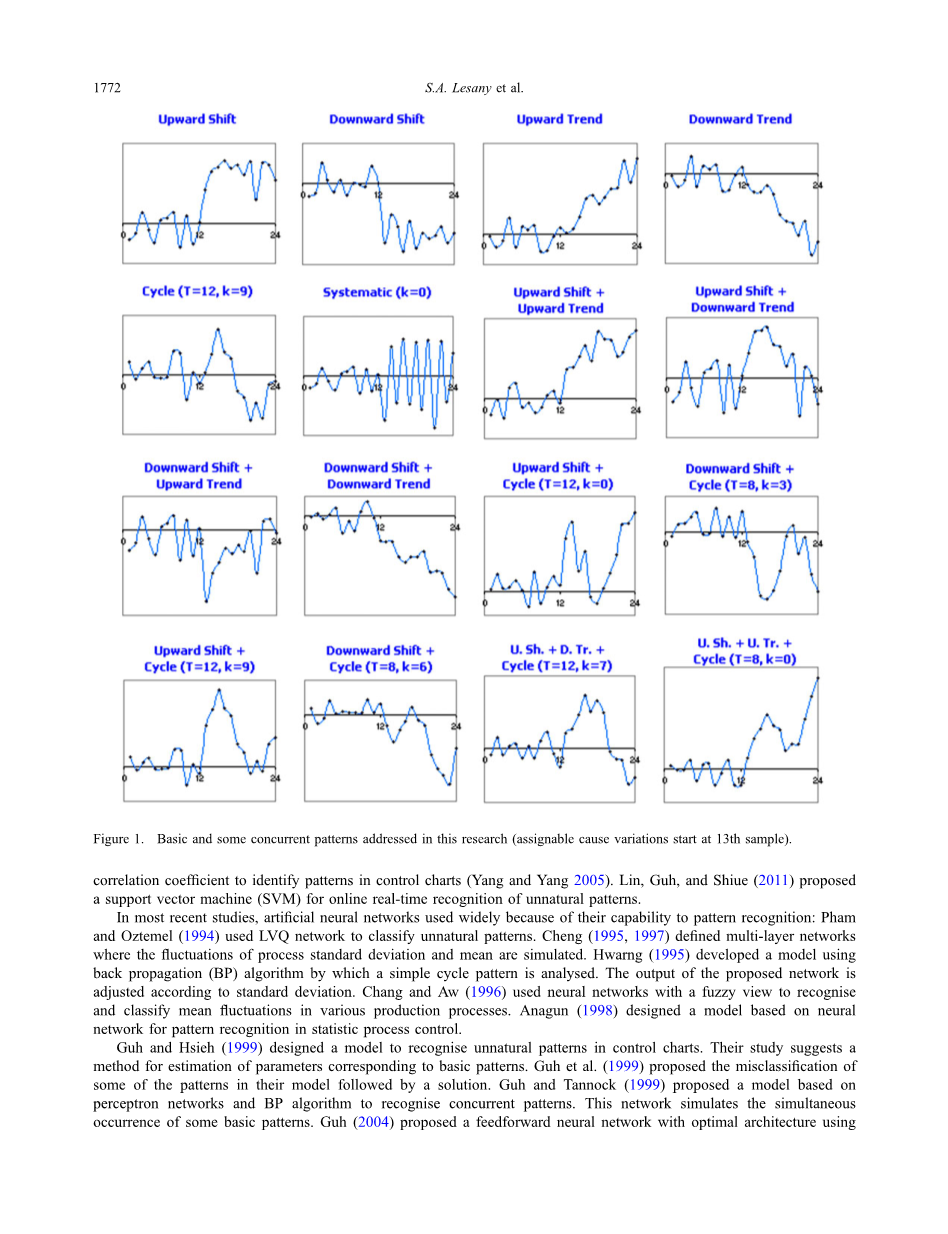
图1:本研究中涉及的基本和一些并发模式(可分配的原因变化从第13个样本开始)
Fatemi Ghomi、Lesany和Koockakzadeh(2011)通过两种类型的神经网络(LVQ和MLP(多层Per-ceptron)的组合,在过程控制图中引入了非自然模式分析和识别模型。模型结构由两部分组成:一般识别,LVQ识别非自然规律,然后估计非自然行为的起始点。在特殊识别中,使用7个双层感知器网络来确定对应于每个非自然模式的参数。在大多数已经开发的模型中,只有非自然的模式被识别出来。
在研究中,除了对其相应的参数进行估计之外,还需要对重要模式的识别和分类进行处理,这是非常罕见的。这些模型一般都是多阶段的,由几个网络组成,或者有多个专家系统的网络,并且在模型的分类错误中得到了较少的关注。虽然已经提出了一种有效的方法来减少诸如Guh(2005, 2010)和Fatemi Ghomi,Lesany和Koockakzadeh(2011)等研究研究中的错误分类,但如果存在高的过程敏感性,则会考虑对模式的错误分类。
本文提出了一种模型,通过拟合线分析和两个网络LVQ、MLP和相应参数的估计来识别控制图中的基本和并发模式。在这种方法中,各种敏感性的模式误分类的风险大大降低。本文的其余部分如下:在第2节中定义了模型中使用的术语;在第3节中将会有关于所提议模型的结构的说明;在第4节中我们展示了模型在重要模式分析和识别中的表现;第5节介绍了比较研究;第6节给出一个数值例子来说明模型是如何应用的;最后第七节是对未来研究的结论和建议。
2.定义、术语和符号
2.1控制箱,控制向量
为了识别和分析模式,需要将R连续样本的结果引入模型中。把这个r维向量看做一个盒子。因为,目标是识别和分类在这个盒子里的重要图案,它被称为控制箱,和相关的矢量控制向量。在确定盒子中样品的状态后,R新的连续样品替换现有的样品。在本文中,每个箱子由12个连续的样品组成,在确定了它的状态后,12个新的连续样品将替换现有的12个样品。新样本随机抽取:然而,在环境因素、生产方法、机械、工具和操作人员等方面,它们的生产条件也必须相同。
2.2拟合线
考虑控制盒中控制向量点的散射,这些点的拟合线是样本点的垂直距离的平方和最小(见图2),这种方法称为最小二乘法(Freund 1992)。通过对拟合线的截距和斜率的检验,得出了该研究的结论和趋势。该方法具有较高的灵敏度,对shd和Tr模式的识别和分析具有很高的效率和精度。
图2:拟合样本线
2.3自然变化的模拟
常见的原因变异在过程中是不可避免的和自然的,这些变异使得对非自然行为的正确、精确和实时的识别变得困难,因为它们从它们的预期形态改变了显著的模式。
应用统计学中每个随机变量都有一个概率分布函数。由于自然变量在控制图中被定义为随机变量,因此它们具有概率分布。此规则是过程控制图(Freund 1992)中模拟自然行为的基础。例如,在x控制图,自然变化有正态分布;在S控制图中,自然变化有伽马分布。
2.4非自然模式模拟和参数介绍
如上所述,在所有观察到的样本中自然存在随机变异。因此,控制过程中不产生非自然模式形成的条件。因此,自然变化总是受制于方程(1):
(1)
其中,t表示样本s数,n(t) t的过程中自然变化量,x(t)为t的样本值。
控制图中任何非自然规律的形成都警告我们在生产过程中有一种特殊的不自然的干扰和控制条件,因此必须对每个模式进行精确的研究。这就是为什么一些标准和参数定义为基本模式。参数指定了非随机变量的速率,并指出了过程修正的过程,而修正的计划则在另一方面进行。此外,质量控制计划中要求的灵敏度水平也被确定为符合要求和标准。基本模式的生成函数和参数如下。
Sh模式生成函数:
(2)
b是该模式的参数,显示位移大小或跳跃幅度。
Tr模式生成函数:
(3)
s为该模式的参数,并显示趋势斜率,这个斜率是棕褐色的角minus;1(s /sigma;)辐射。
Cys和Sys模式函数:
(4)
当参数T(即周期)= 2时,式(4)为Sys的生成模式函数。模式,以及显示过程的波动幅度。在其他情况下,该函数生成Cyc模式。在这种情况下,a显示振幅。关键的一点是,这两种模式出现的过程根源完全不同,这两种行为类型的技术概念根本没有关联。
参数k是一个在
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[22806],资料为PDF文档或Word文档,PDF文档可免费转换为Word



