能源约束下的无人机区域搜索算法研究毕业论文
2020-02-16 18:07:50
摘 要
随着智能无人系统的快速发展,无人机作为一类重要的无人系统广泛应用于社会生活的各个领域。其中,旋翼无人机因其灵活可控的特性,常被用于完成中小范围复杂区域的覆盖任务。但旋翼无人机可携带的能源有限。因此,需要研究有限能量对无人机飞行距离的约束,以及在满足能耗约束条件下的区域覆盖算法。针对该研究内容,本文首先提出了一种带随机扰动的线性能耗模型;其次,提出了一种满足该能耗模型的区域覆盖路径规划算法;最后,实现算法的原型系统并通过仿真实验进行验证。本文的主要工作和创新点包括以下几个方面:
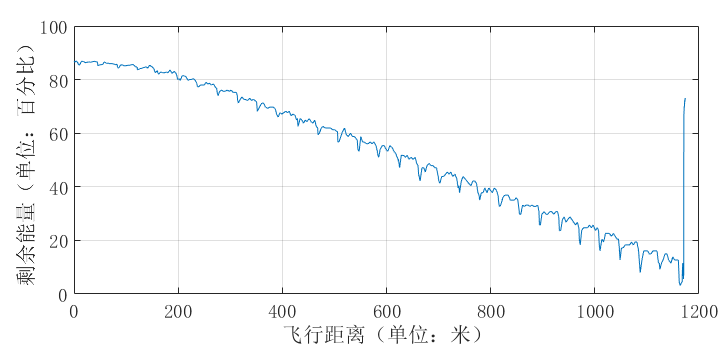
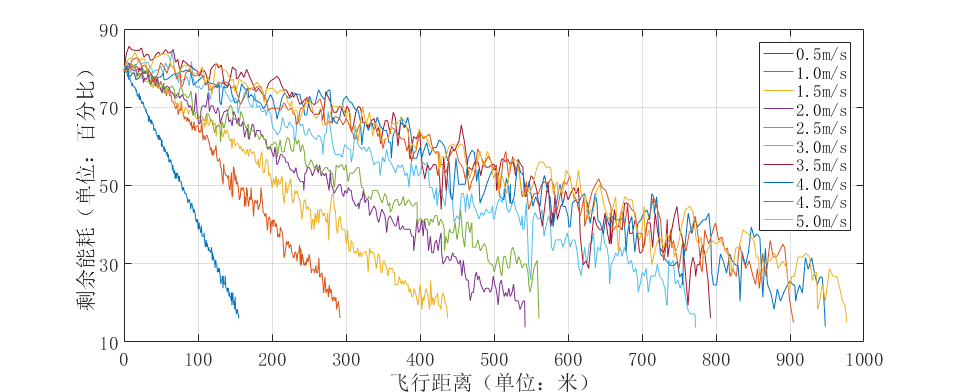
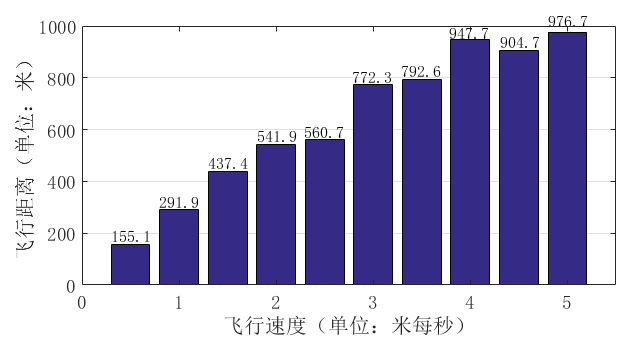
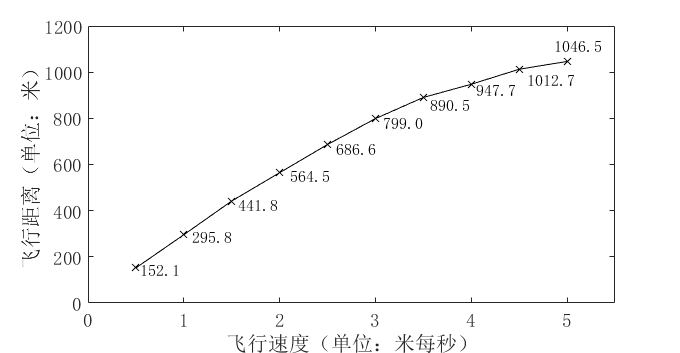
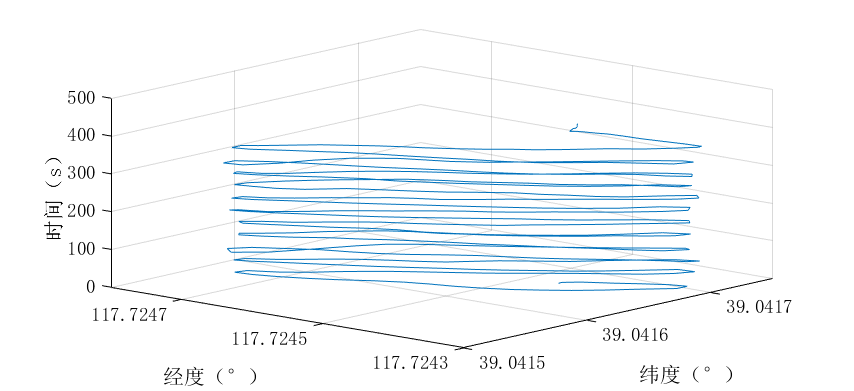
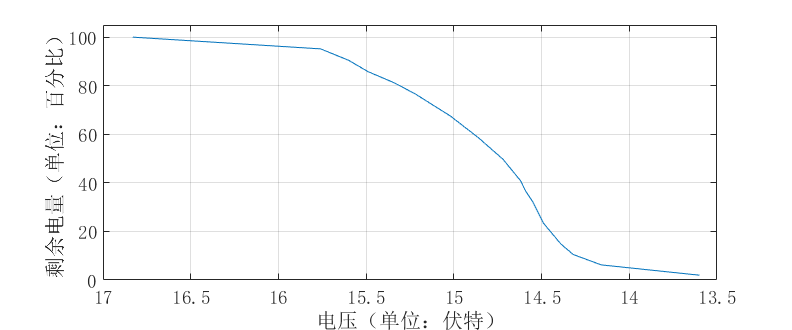
- 通过实验测量四旋翼无人机在不同飞行速度下机载电池的能量消耗过程,对无人机的能耗与飞行距离的关系展开研究。根据实验数据,分析不同速度对能耗与飞行距离变化率的影响,构建一种带随机扰动的线性模型。通过拟合的方式得到被测速度下的模型参数。分析实验数据得出结论:无人机剩余能量与飞行距离基本成线性关系,其线性变化率随速度增加而变大,且无人机的转弯过程和环境因素的影响均会使机载电池的剩余能量产生波动。
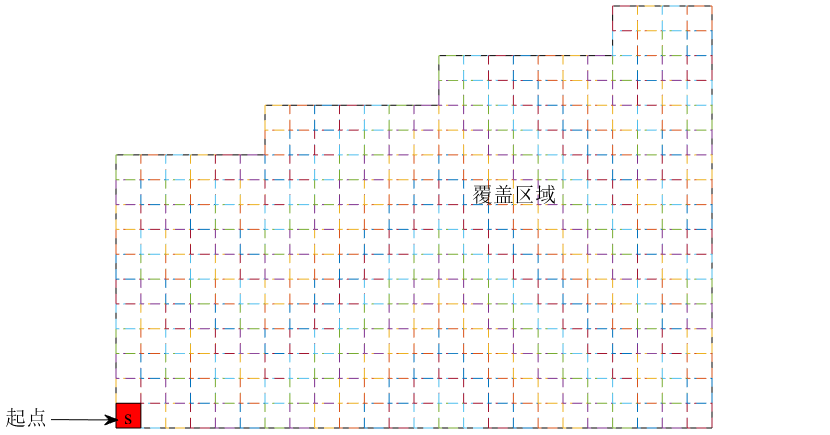
- 针对无人机飞行距离受能量约束的场景,通过区域分割的方式,将单架无人机的区域覆盖算法应用到多无人机的区域覆盖问题。在算法设计过程中,本文提出了“轨迹分割”、“返航轨迹优化”和“负载均衡”三项优化技术,提高每架无人机的能耗利用率,并使无人机集群完成区域覆盖的总时间最短。
- 基于本文提出的区域覆盖算法,实现算法的原型系统。该系统根据目标区域的输入,输出最优的无人机数量和每架无人机的飞行轨迹。通过MATLAB实验,验证了本文提出的“轨迹分割”、“返航轨迹优化”和“负载均衡”三种优化技术的改进效果。最后,在V-REP仿真环境中进行全流程仿真,验证算法在实际集群无人机上的运行效果,得到了预期效果。
关键词: 集群无人机; 区域覆盖; 路径规划; 能耗模型
Abstract
With the rapid development of intelligent unmanned systems, UAVs(Unmanned Aerial Vehicles) have been widely applied in various fields of our social lives. As a typical representative, the rotorcraft has been extensively used in completing the task of covering small and medium-sized complex areas. Considering the energy limitation of the rotorcraft, the rotorcraftrsquo;s flight distance and the area coverage algorithm with distance limitation should be researched. Firstly, a linear energy consumption model with random disturbance is proposed. Then, the path planning algorithm which could finish the task of area coverage by UAVs with the constraint of energy is researched. Finally, the prototype system of the area coverage algorithm is implemented and the algorithm is verified by simulation experiment. The main work and innovation of this thesis involves the following aspects:
- By measuring the process of the onboard batteryrsquo;s energy consumption in quadricopter at different speeds, the relation between UAVrsquo;s energy consumption and flight distance is researched. According to the experimental data, the influence of speed on the rate of energy consumption and flight distance is analyzed and the linear model with random disturbance is constructed and the model parameters under the measured speed are calculated. There are some conclusions that the residual energy of UAV has a linear relationship with the flight distance and the rate of linear change increases as the speed increases. Both the process of UAVrsquo;s turning and environment factors could cause the residual energy of the onboard battery to fluctuate.
- In the scenario where the UAVrsquo;s flight distance is limited by restricted energy, the area coverage algorithm could be extended from an UAV to UAVs by region division. During the process of algorithm design, three optimized techniques, “region division” and “return path optimization” and “load balance”, have been proposed and improve each UAVrsquo;s energy efficiency while minimizing the total time to complete the area coverage task.
- The prototype system is implemented according to the UAVsrsquo; area coverage algorithm that outputs the optimized UAVrsquo;s number and trajectories on the basis of the target region input. The improvement of the three optimized techniques, “region division” and “return path optimization” and “load balance”, has been verified by MATLAB experiments. Finally, the whole process in V-REP is simulated to verify the actual operation effect of UAVs and achieve the desired effect.
Key Words:UAVs; area coverage; path planning; energy model
目录
摘要 Ⅰ
Abstract Ⅱ
第1章 绪论 1
1.1 研究背景与意义 1
1.2 国内外研究现状 2
1.3 论文研究内容 3
1.4 论文组织结构 4
第2章 无人机的能耗模型构建 5
2.1 无人机能耗建模 5
2.2 速度对无人机能耗的影响 6
2.3 能耗测量实验 9
2.3.1 实验平台 9
2.3.2 实验方案 10
2.3.3 实验结果分析 11
2.4 本章小结 13
第3章 基于能耗约束的集群无人机区域覆盖算法研究 14
3.1 区域覆盖问题描述 14
3.2 面向单架无人机的算法分析 15
3.3 面向集群无人机的算法设计 18
3.3.1 轨迹分割 18
3.3.2 返航轨迹优化 19
3.3.3 负载均衡 20
3.4 本章小结 21
第4章 原型实现与仿真实验 22
4.1 原型实现 22
4.1.1 MATLAB 配置 22
4.1.2 原型方案设计 22
4.1.3 实现结果分析 23
4.2 仿真验证 24
4.2.1 V-REP 简介 24
4.2.2 仿真实验设计 24
4.2.3 仿真结果分析 25
4.3 本章小结 26
第5章 总结与展望 27
5.1 本文工作总结 27
5.2 未来工作展望 27
参考文献 29
致 谢 31
绪论
研究背景与意义
当前,人类社会正加速进入智能化时代,以智能机器人和无人机为代表的智能无人系统正成为科技发展的主流方向和战略性新兴产业。在智能化时代,智能无人系统将成为时代的主角,催化新一轮的机器革命。现如今,世界各主要国家和地区均将以智能机器人和无人机为典型代表的智能无人系统研发作为引领技术创新、实现产业升级进而抢占科技制高点的重要契机。2016年俄罗斯国防部长批准《2025年前发展军事科学综合体构想》,该《构想》提出将分阶段强化国防科研体系建设以促进创新成果的产出,并将人工智能技术、无人自主技术作为俄罗斯军事技术在短期和中期的发展重点。2016年8月日本防卫省发布《中长期技术规划》,其中重点强调包括地海空无人系统在内的军事技术领域的发展,推进对无人技术和智能化技术的研究。2018年8月美国国防部公开《无人系统综合路线图(2017-2042)》,该《路线图》指出互操作性、自主性、安全网络、人机协同是加速无人系统作战应用的四大驱动动力,指导无人机、无人车等无人系统的全面发展。2017年7月国务院印发《新一代人工智能发展规划》,指出应建立新一代人工智能基础理论体系,重点突破面向自主无人系统的协同感知与交互,自主协同控制与优化决策、知识驱动的人机物三元协同与互操作等理论,形成自主智能无人系统创新性理论体系架构。智能无人系统不但被广泛应用于工业生产、智能交通、环境监测以及国家安全等诸多重要领域,也已经快速渗透到人们日常生活的各个方面,并将持续对社会与经济发展产生巨大影响。
无人机作为一类重要的无人系统,以其高机动、低成本、高效用等优势,广泛应用于国家安全、军事、社会生产等领域。无人机按照构型可分为固定翼无人机、旋翼无人机和复合翼无人机三类。固定翼无人机具有飞行距离长、巡航面积大、飞行速度快等优势,以机动性强和载荷大的特点,主要应用于军事、航天等国家安全的重要领域。2015年9月美国国防预先研究计划局(DARPA)发布“小精灵(Gremlins)”项目,在敌方防御射程外,使用现有的大型有人飞机发射成群的小型固定翼无人系统,对威胁进行探测或干扰,并在任务执行完毕后自主回收。但固定翼无人机受场地限制多、对控制系统要求高、操作难度大。相比之下,旋翼无人机以其部署灵活、操作简便、可悬停等优点,受到国内外高校和研究机构的广泛关注,常应用于无线通信、安全监察、影视拍摄等领域。复合翼无人机同时具有旋翼无人机和固定翼无人机的功能,但目前尚处于概念提出阶段,还未广泛应用。这三类无人机中,旋翼无人机以精确控制、灵活起降但续航时间短的特性更适用于中小范围和复杂区域的相关工作,例如电力巡检、水利监测、地形探测等。
单体智能迅猛发展的同时,智能无人系统也在加速向群体智能发展。相比单体智能,群体无人系统能够通过有效协同完成更富挑战性的任务。中国计算机学会在《CCF2016-2017 中国计算机科学技术发展报告》中指出,人工智能2.0计划将群体智能列为重点内容。以无人机为典型代表的群体无人系统当前已展现出强大的发展趋势。2014年美国DARPA提出“拒止环境中协同作战(CODE)”项目,通过发展协同算法,提升无人系统编队的自主协作能力。2015年亚马逊申请无人机集群送货的专利,用小型无人机集群根据需要组成不同排列,以满足不同形状、尺寸的货物的运输需求。2018年跨年夜一飞智控公司在天津滨海展示200架无人机的编队演出。由此可见,无人机在群体智能方面的研究具有重要的军事和社会价值。
在集群无人机应用中,区域覆盖(Area Coverage)作为一类重要任务,常用于目标搜索[1]、室内外巡逻[2]、灾难搜救[3]、战场侦查[4]等场景。无人机区域覆盖是指在满足一定约束条件和性能指标的同时,无人机避开障碍物和危险源并实现待覆盖区域无遗漏地遍历搜索。当区域覆盖任务由多架无人机共同承担时,无人机集群通过协同搜索的方式完成区域覆盖任务,将比单架无人机完成任务的用时更短。针对区域覆盖任务,旋翼无人机具有垂直起降、精确控制、灵活操作等优势,更适用于完成中小型复杂区域的覆盖任务,例如战场排雷[5]、地理测绘[6]、环境监测[7]等。
但由于旋翼无人机可携带的能源有限,其续航时间和飞行航程一般比固定翼无人机短。在完成区域覆盖任务的过程中,若不考虑有限能量对飞行距离的约束,将导致规划路径与实际覆盖过程不一致,使得无人机在覆盖过程中需要多次返回起点补充能量,再从起点飞到中断位置继续完成覆盖任务。此时,无人机在往返充电过程中浪费有限能量且任务执行效率低。因此,结合旋翼无人机能量约束条件的集群无人机区域覆盖技术研究具有重要意义。
1.2 国内外研究现状
区域覆盖问题作为机器人领域的一类基础问题被国内外学者广泛研究。根据覆盖方式不同,区域覆盖问题可具体分为三种:(1)周期性覆盖,即规划出的区域覆盖轨迹只有一条,各无人系统(或多无人系统组成的编队)按照等时间间隔在同一条轨迹上执行覆盖任务。典型示例如美国宾夕法尼亚大学GRASP实验室的Kumar教授团队,提出基于图搜索和样条法相结合的区域覆盖轨迹求解方法[8]。(2)分布式覆盖,即将整个无人系统群体划分为多个组,每组由一个或多个无人系统组成,每个组负责对一个子区域进行覆盖。例如,南卡罗来纳大学的Karapetyan等提出的基于近似启发式和子区域分割的覆盖方法,该方法能够在完成覆盖任务的同时最小化各无人系统的负载[9]。(3)固定式覆盖,该方式类似于分布式覆盖,即各无人系统在某个区域上空盘旋覆盖。如瑞士洛桑联邦理工学院(EPFL)的Floreano教授团队,基于虚拟点跟随方法实现了固定点绕飞的区域覆盖方法[10]。根据任务需求和被覆盖区域的划分方式的差异,区域覆盖问题可划分为两类:(1)用顶点表示需要被覆盖的位点或子区域,用图连接的方式表示所有顶点间的关系。此时顶点的数目或顶点间的权重作为问题的重要考虑因素。在这种情况下,若不考虑能量约束,区域覆盖问题可转化为旅行商问题(Traveling Salesperson Problem, TSP);若考虑能耗约束,区域覆盖问题可归类为有跳数限制的顶点路由问题(Vehicle Routing Problem, VRP)[11]。(2)覆盖目标区域内的每一个位点:将目标区域表示为多边形来进行划分,把机器人本身表示为一个网格单元或矩形单元。此时,覆盖问题转换为在多边形表示的区域内移动机器人,使区域内的每个点都能被覆盖的规划问题[12]。
路径规划是无人机执行区域覆盖任务的关键技术,旨在根据任务需求生成无人机的飞行轨迹[1]。根据环境信息是否已知,区域覆盖的路径规划问题可划分为三类:(1)环境信息已知的全局路径规划,即事先知道目标区域的地图,在执行飞行任务前,可根据已知地图提前计算出每架无人机的路径。(2)环境信息未知的局部路径规划,即对陌生环境进行区域覆盖,需要基于传感器信息进行实时搜索,并生成局部环境地图实时规划运动路径。(3)全局和局部混合的规划方式,即针对已知区域出现突发情况或环境变化的场景,通过在全局路径规划的基础上进行路径修正,保证覆盖任务能够正确执行[13]。针对无人机集群,简单做法是将目标区域通过某种策略进行划分,把问题简化为子区域内的单架无人机的区域覆盖[14]。对于单无人机的区域覆盖算法在国内外均有广泛研究,常见算法有随机覆盖法、扫描线法、螺旋法、精确单元分解法等[13]。关于多机器人的区域覆盖算法有生成树法[15]、启发式方法[1]中的蚁群算法、遗传算法等。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: