平行式电驱桥设计毕业论文
2020-02-19 18:58:01
摘 要
当今,能源资源日益短缺,环境污染问题越发严峻,人们对纯电动汽车的关注度也进一步加大。纯电动汽车以成本较低、零污染、质量轻等优点,成为未来汽车行业的主要发展方向之一。纯电动汽车的驱动方式有以下三种,即传统驱动方式、电机-驱动桥一体化驱动方式和轮毂驱动方式。其中电机-驱动桥一体化驱动方式又可根据电动机与驱动桥的组合方式分为以下三种驱动模式,即双联式、同轴式与平行式。
本文主要是对平行式电驱桥进行研究设计,其主要内容如下:根据自选车型的参数,按照传统设计方法以及参考同种车型确定总体参数,并确定电机和蓄电池的参数,然后确定减速器、差速器、半轴和桥壳的结构类型,最后进行参数设计及强度校核。平行式电驱桥设计过程中基本符合实际,结构合理,零件设计尽量满足标准化、通用化和系列化的要求。
关键词:电驱桥,二级行星减速器,差速器,半轴,桥壳
Abstract
Nowadays, with the increasing shortage of energy resources and the increasingly serious environmental pollution, people pay more attention to pure electric vehicles. Pure electric vehicle (EV) has become one of the main development directions of automobile industry in the future because of its low cost, zero pollution and light quality. There are three driving modes of pure electric vehicle, namely, traditional driving mode, motor-drive Bridge integrated driving mode and hub driving mode. According to the combination of motor and driving axle, the integrated driving mode of motor-driving axle can be divided into three driving modes, i.e., double-connection, coaxial and parallel.
This paper mainly studies and designs the parallel drive bridge. The main contents are as follows: According to the parameters of the self-selected vehicle, according to the traditional design method and referring to the same type of vehicle, the overall parameters are determined, and the parameters of motor and battery are determined. Then the structural types of reducer, differential mechanism, half-axle and axle housing are determined. Finally, the parameters are designed and the strength is checked. The design process of parallel drive bridge basically conforms to the reality, the structure is reasonable, and the parts design meets the requirements of standardization, generalization and serialization as far as possible.
Key Words: electric drive bridge, two-stage planetary reducer, differential mechanism, half axis, axle housing
目录
摘要 Ⅰ
Abstract Ⅱ
第一章 绪论 1
1.1 目的及意义 1
1.2 纯电动汽车国内外发展现状 1
1.2.1 国外纯电动汽车发展现状 1
1.2.2 国内电动汽车发展现状 2
1.3 论文研究的主要内容 2
第二章 动力系统参数匹配 4
2.1 车型参数和性能指标的确定 4
2.2 传动结构设计 4
2.3 电机参数的确定 6
2.4 蓄电池参数的确定 8
2.5 本章小结 9
第三章 主减速器设计 10
3.1 主减速器结构形式的选择 10
3.2 主要参数的确定 11
3.3 几何尺寸计算 15
3.4 受力分析 17
3.5 齿轮强度验算 18
3.5.1 a-g啮合齿轮副强度验算 18
3.5.2 b-g啮合齿轮副强度验算 22
3.6 二级行星减速器的主要参数 23
3.7 本章小结 25
第四章 差速器设计 26
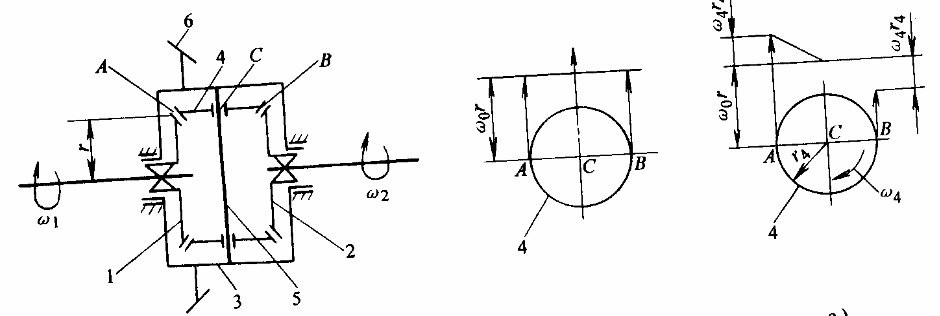
4.1 对称式圆锥行星齿轮差速器的差速原理 26
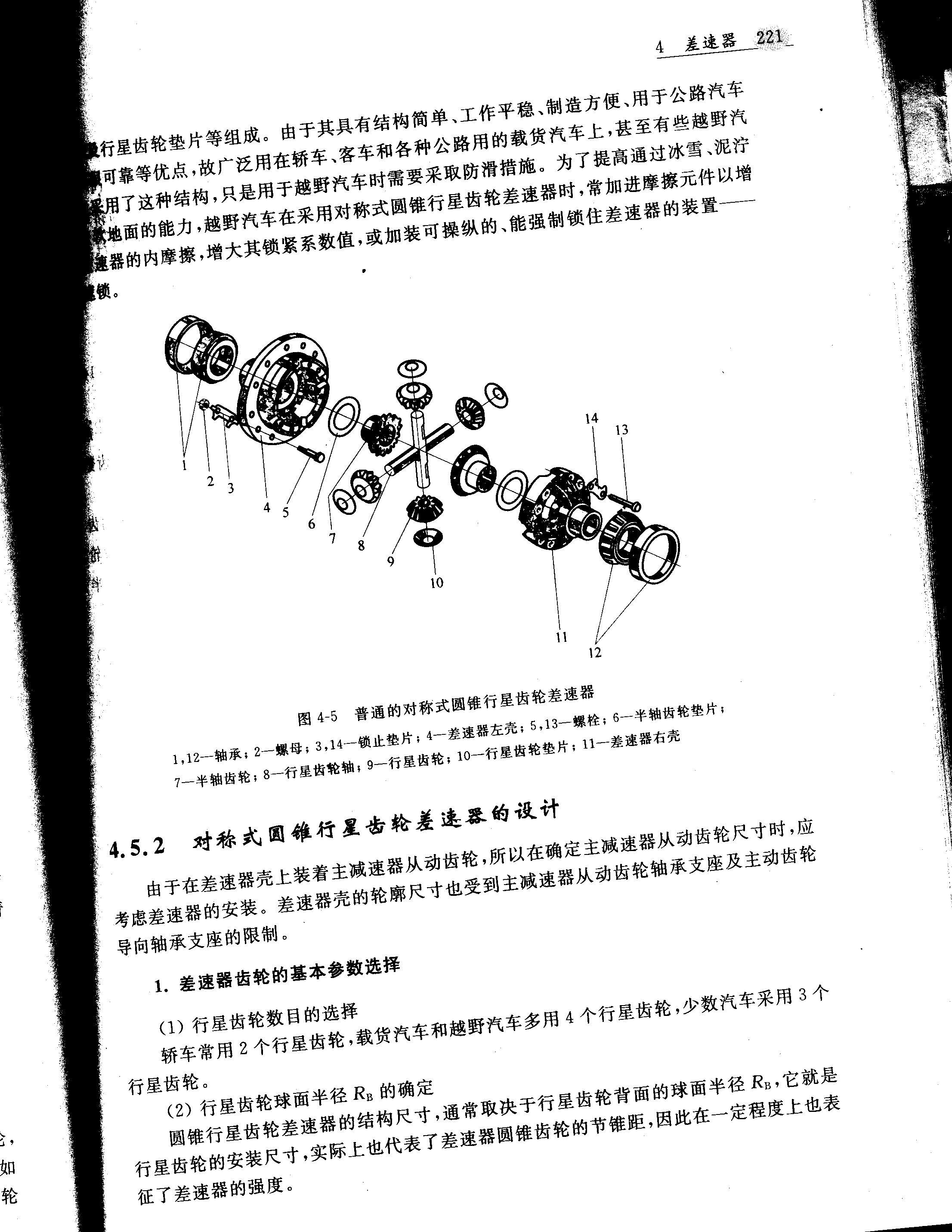
4.2 对称式圆锥行星齿轮差速器的结构 27
4.3 对称式圆锥行星齿轮差速器的设计 27
4.3.1 差速器齿轮的基本参数的选择 27
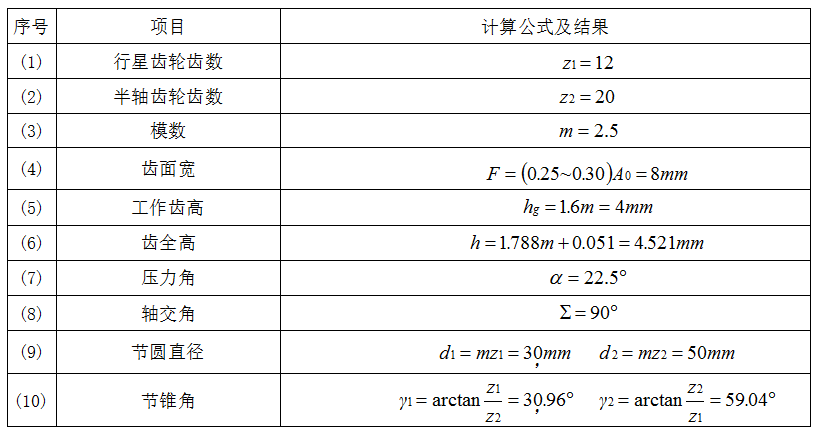
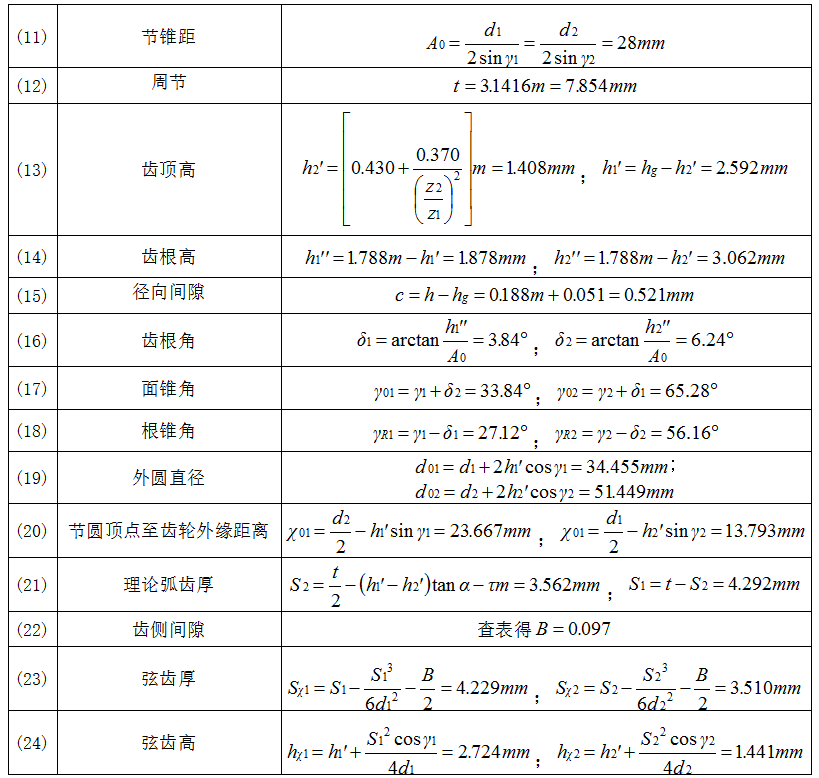
4.3.2 差速器齿轮的几何计算 30
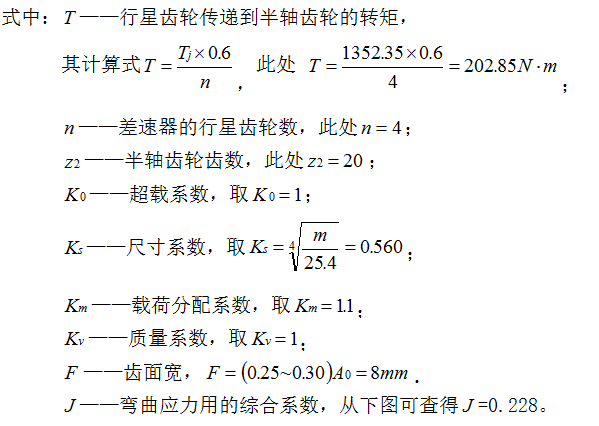
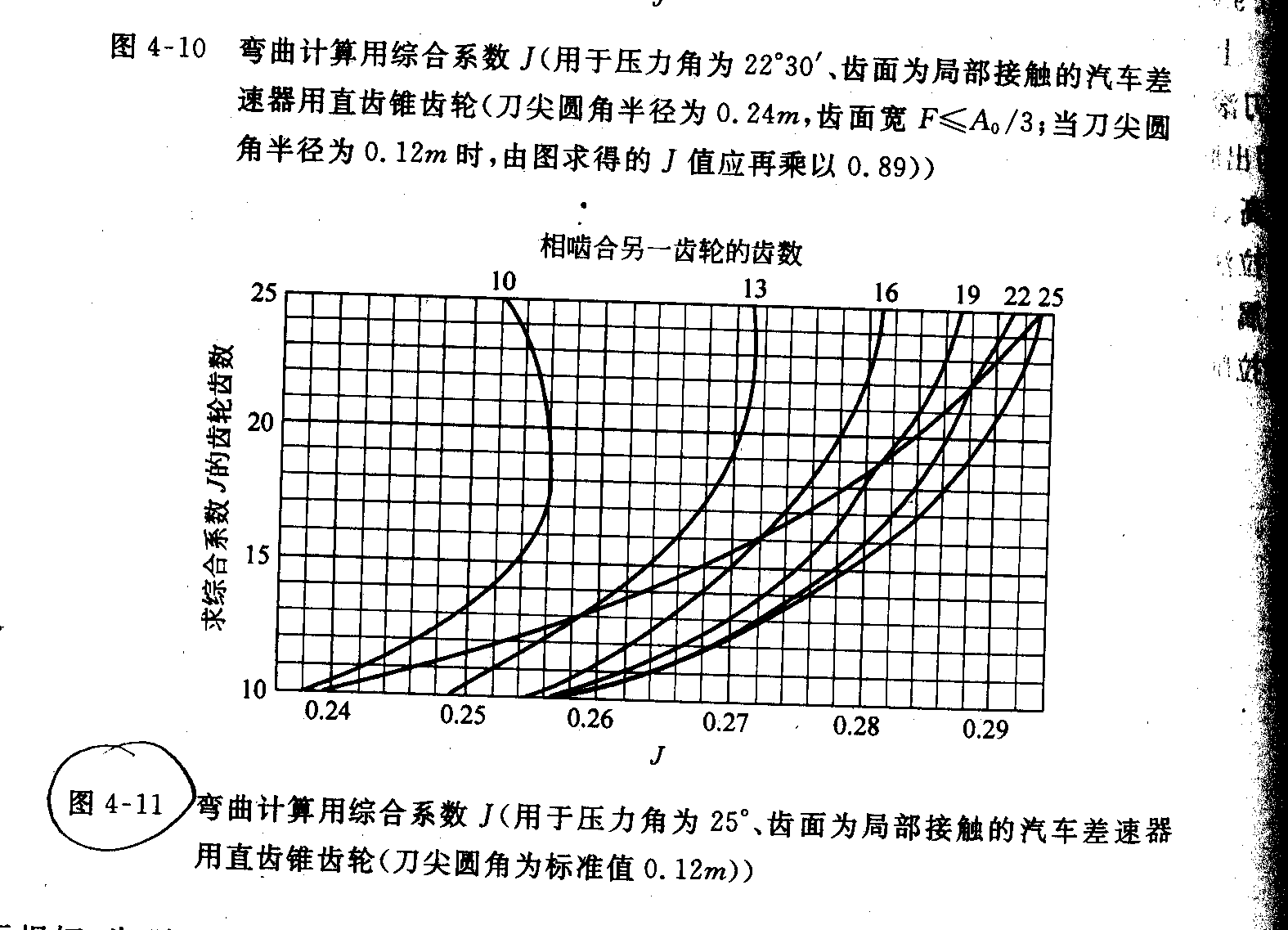
4.3.3差速器齿轮的强度计算 31
4.4本章小结 32
第五章 驱动半轴的设计 33
5.1 全浮式半轴计算载荷的确定 33
5.2 全浮式半轴的杆部直径的初选 34
5.3 全浮式半轴的强度计算 34
5.4 半轴花键的强度计算 35
5.5本章小结 35
第六章 驱动桥壳的设计 36
6.1钢板冲压焊接整体式桥壳的结构 36
6.2 桥壳的受力分析与强度计算 36
6.2.1 桥壳的静弯曲应力计算 37
6.2.2 在不平路面冲击载荷作用下的桥壳强度计算 38
6.2.3 汽车以最大牵引力行驶时的桥壳强度计算 39
6.2.4 汽车紧急制动时的桥壳强度计算 40
6.3本章小结 42
第七章 总结 43
致 谢 44
参考文献 45
第一章 绪论
1.1 目的及意义
在当下,环境问题的影响渐渐体现出来了,人们也对改善环境问题越来越重视。各国也更加关注汽车对环境的影响,特别是对车辆排放产物要求更加严格,大众也更加支持小排量车辆的生产。车辆排放废气导致的环境污染问题,在传统的内燃机上还不能够解决。人们意识到开发新能源取代石油作为能源可以更好地解决问题。各国正在开发新能源汽车,即绿色友好环境,可再生能源,可回收材料和智能交通。由于国家政策的强势推动和地方政府明确的指导方针,新能源产业在汽车的快速发展中已经成为不可阻挡的一部分,并在逐步加强。纯电力车桥是汽车所有产业中的重要组成部分,并将渐渐取代同类型部分。这种趋势将会随着整车的电气化而不断发展。
与传统汽车相比,纯电动汽车具有更加绿色环保,结构也更简单[1]。纯电力车还有运行维护良好,能量转换率高,能量可反复利用等优点。众所周知,在未来汽车行业的主要发展中,电动汽车将会画下浓墨重彩的一笔。因此,各国一直在发展与研究纯电力车。在中国,汽车行业起步较晚。中国虽然能生产汽车主要部件,但其技术含量与发达国家的产品之间相差较大。中国生产的汽车主要部件在国际中尚未成为竞争优势。电驱桥总成技术作为整车的重要组成部分,其轻量化与高效率相结合,智能和舒适性相结合。它将成为行业发展的方向和并替代原有车桥技术。目前,中国电动汽车的发展正处于一个特别重要的阶段。驱动桥的集成化发展与一体化发展将不可避免地加剧汽车行业的竞争。只有掌握最好的技术和制造,我们才能在未来的工业竞争中,赢得领先地位并成为领跑者。
1.2 纯电动汽车国内外发展现状
1.2.1 国外纯电动汽车发展现状
自20世纪以来,全球变暖,加速能源消耗,枯竭问题和生态退化等问题引起了全人类的关注。人们开始探索和解决这些问题。因为电动汽车提供新型能源,零污染和易于更换。同时,在替代性方面,它也具有很大的优势[2]。发达国家和大多数发展中国家开始研究与电动汽车相关的技术和应用,从而不断推动行业的快速发展。
美国,德国和日本等国家较早地开始了在电动汽车领域的研究设计及生产。当前,这些国家的电力车市场规模扩张速度也越来越快。相比之下,中国的电动车市场起步较晚,也取得了一些令人满意的结果。
在美国,一些全球知名汽车公司领导着纯电动汽车市场。这些汽车公司包括通用、福特和克莱斯勒等。自1991年以来,他们开始对电动汽车开始探索和研究。特别是在电动汽车电池技术,他们进行了深入的研究。在2001年初,美国正式成立了SAE燃料电池标准委员会。该委员会将其焦点定在电池技术上,并开始不断研究,但长期以来无法实现引人注目的创新,从而导致开始对燃料电池汽车的投资。2016年7月,美国建立了“电池500”研究中心。该研究中心是在众多国家实验室和世界顶尖大学的联合倡议和推动下建成的。其旨在增加电力车的行驶距离,降低电力车的生产制造投入。在开始实施国家电力交通发展规划后的几年时间里,德国将研究对象定位围绕蓄电池技术、驱动技术、车身轻量化技术等电力车核心技术领域。同时,也重点发展电动车的信息及通信技术、充电基础设施和整车一体化技术。德国共启动了82个该类型的研究项目[3]。创新型技术的“干电池”电力车被德国十分的重视。近日,德国将投入大量的人力财力在该技术上。日本对于电力车技术的研发也十分关注。在1965年,电动汽车研发项目正式启动。该项目被置于日本国家研究项目中,并成立了以日本电力车协会为主的各种协会。在1997年,日本启动了锂电池电力保存技术项目。该项目旨在研究开发出高效率、体积小、容量高的用于电力车上的锂电池。在当年,日本开发出了全世界第一辆以锂离子电池为蓄电池的电力车。该电力车的名字是Prairie Joy。目前,日本已经制定9项关于电力车充电的规范,并成为了国际标准。日本已经形成了成熟的电力车生产技术和开发体系。
1.2.2 国内电动汽车发展现状
2013年以来,国家各部门分别从新能源汽车推广生产、鼓励购买、建设充电设施、降低充电价格、遏制地方保护政策、减免税务等多个方面出台了相关政策,从而促进我国关于新能源汽车的政策得到完善并适应时代发展趋势。2013年1月15日,国务院发布《关于印发“十二五”国家资助创新能力建设规划的通知》,其中提出了两个汽车行业有关的建议,即重点建设制造企业的创新型能力和建设战略性新型产业的创新型能力。在通知中,着重指出了我国将不遗余力地发展节约能源、绿色环保的新能源汽车等战略性新兴产业,并且在新能源汽车产业中要重点发展纯电力车和燃料电池汽车技术。在政策影响下,全国各地,越来越多的新能源汽车得到应用,尤其是在2014年9月1日减免购买税政策实施之后,产量第一次创历史新高。中汽协统计数据显示,2017年全国销售新能源汽车556393辆,同比增长69%;其中,纯电动车全年共销量448820辆,占新能源乘用车总量的81%,取得了不可动摇的地位。
1.3 论文研究的主要内容
- 根据平行式电驱桥的结构特点,确定整体设计方案。
- 了解掌握以电机为驱动装置,依靠行星轮系进行减速,用短半轴来带动车轮旋转的传动原理。
- 在设计过程中,描述主减速器的组成和差速器的差速原理和过程。
- 在系统构型设计的基础上,进行了包括驱动桥壳、电动机、主减速器和差速器的设计。
- 进行平行式电驱桥总成设计。
第二章 动力系统参数匹配
2.1 车型参数和性能指标的确定
如今,汽车的动力性和经济性等性能越来越被人们看重。这些性能主要取决于汽车的动力系统数值匹配[4]。按照设计准则,本文选取东风小康EC36低速电力物流车为研究车型,其整车参考数值及性能标准如表2.1,2.2所示:
表2.1 整车参数
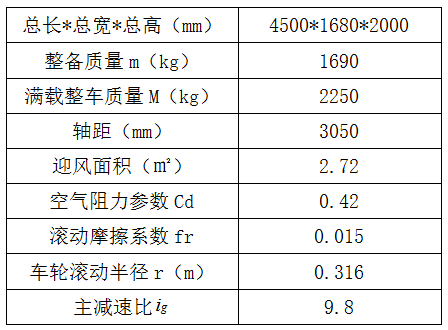
表2.2 性能指标要求
2.2 传动结构设计
纯电力车是仅使用动力电池作为能源的新能源车辆。其传动结构的布置对于充分利用驱动电机的性能是必不可少的。本文以东风小康EC36为模型,设计了低速电力物流车。该车型的传动结构为电动机-车桥集成化驱动系统。电动机-车桥集成化驱动系统根据电动机与车桥的组合方式,可分为以下三种驱动模式:双联式、同轴式和平行式。
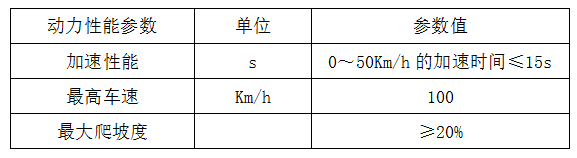
1.双联式
双联式电动机-车桥集成化驱动系统也可以称为双电机驱动系统,如图2.1所示。
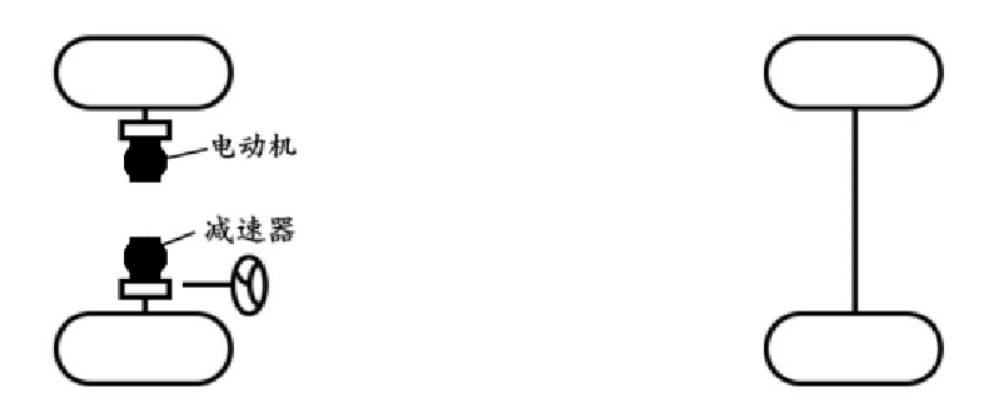
图2.1 双联式电动机-车桥集成化驱动系统结构形式
该结构比较小巧、传动效率高。该传动结构不足之处是要求电机有较宽的转矩转速调节范围。两个电机的控制精度还有待提高,需要增加功率转换器和电机,从而使制造成本增加。
2.同轴式
该结构如图2.2所示。
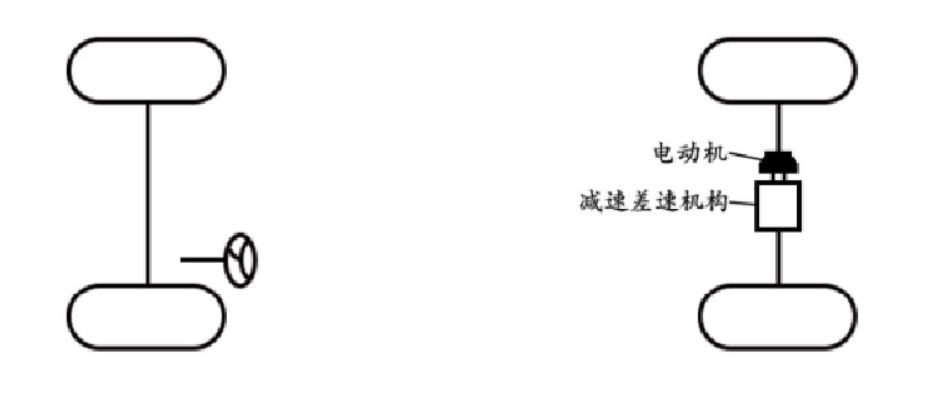
图2.2 同轴式电动机-车桥集成化驱动系统结构形式
该传动结构的优点是比较紧凑,体积较小。其不足之处是电机集成于桥壳内,使得维修非常困难,同时要求零件应具有高精度、高强度和较大的刚度。
3.平行式
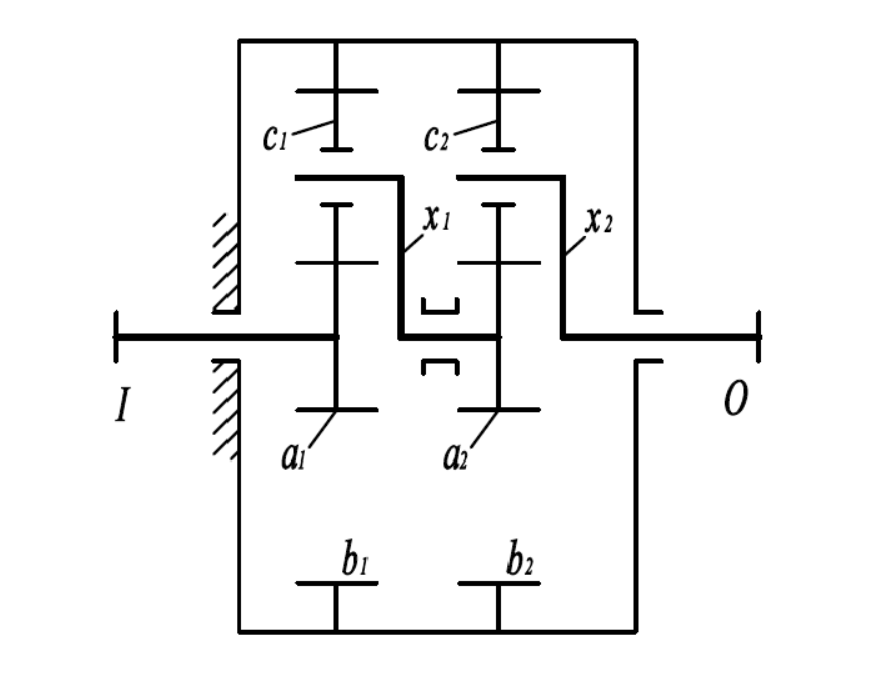
与同轴式驱动系统的结构布置相差不大,其结构布置形式如图2.3所示。
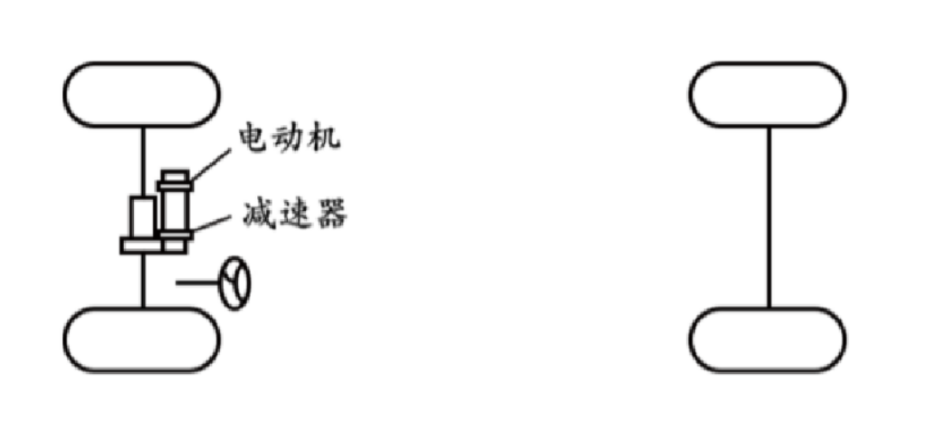
图2.3平行式电动机-车桥集成化驱动系统结构形式
该结构形式比较紧凑、传动效率较高。而且安装比较方便。
本文车型是电力物流车,其得能耗较低,传动效果好,行驶距离更远。由于使用频繁,应有利于使用和维修,尽量降低生产投入。
综合考虑以上三种驱动模式,本文采用电动机-车桥集成化驱动系统。它的的生产投入低。同时机械差速器能更好地处理因电控差速控制引起的起步时转矩输出不足问题。它也能更好地处理转弯差速调节精度问题。
2.3 电机参数的确定
电动机是纯电动汽车的主要能源。电机的峰值功率/转速、额定功率/转速和最大转矩等是其主要参考数值。另外,电动机应坚固、可靠,且价格较低。因此选取合理的电动机参考数值就显得尤为重要[5]。
由汽车理论知,汽车功率平衡方程为:
 (2.1)
(2.1)
电动机最大功率一般由整车动力性指标来决定。
第一步,由电动车最高车速确定,公式如下:
 (2.2)
(2.2)
第二步,由电动车所需求的最大爬坡度确定电动机最大功率,公式如下:
 (2.3)
(2.3)
其中,当最大爬坡度i等于20%时,α等于11.31°。
第三步,由电动车所需要的加速时间来确定电动机最大功率,公式如下:
 (2.4)
(2.4)
其中,根据车型的需求,车速从0到50km/h所需减速时间为15秒;δ=1.0425是该车型的旋转质量换算系数[6]。
电动机额定功率应同时满足电动车最高车速、最大爬坡度和加速时间的要求[7],所以电动机的额定功率为:
 (2.5)
(2.5)
考虑相对应余量,可以取额定功率为30kw。
通常,电动机的过载系数λ取值范围是2~3,本文中取过载系数的值为2.25,又因峰值功率Pm计算公式如下:
 (2.6)
(2.6)
可得峰值功率 。
。
- 电机转矩与转速的确定
其计算过程如下:
 (2.7)
(2.7)
考虑到相对应的余量,可以取电机的最大转矩为 。
。
电动机的额定转速计算过程如下:
 (2.8)
(2.8)
取电动机的额定转速为 。
。
电动机的最高转速计算过程如下:
 (2.9)
(2.9)
取电机最高转速 。
。
因此电机额定转矩为:
 (2.10)
(2.10)
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: