多指机器人手:抓取和操纵控制外文翻译资料
2021-12-26 17:20:37
英语原文共 10 页
多指机器人手:抓取和操纵控制
摘要
自从机器人学诞生以来,机器人手一直是主要的研究课题之一,因为抓取和操纵各种物体是各种机器人系统的基础功能。本文调查和分析了国内外对于多指机器人手抓取和操纵控制的研究现状。在简要地介绍多指机器人手的发展史之后,给出抓取和操纵领域代表性的研究成果。关于抓取,解释了一些基本的分析概念包括力封闭/形封闭和主动封闭/被动封闭,以及介绍多种能有效抓取的抓取位置优化。关于操纵,展示了混合的位置/力控制方法和阻抗控制方法。本文也出现了我们最近关于柔性手指抓取和操纵和研究。最后讨论了一些未来的调查方向。
1.介绍
用机器人手抓取和操纵各种物体是许多机器人系统的基本功能,包括类人机器人、工业机器人和轮式移动机器人,在例如家庭,公共建筑、城区、工厂、空间和海洋等各种环境中都都能发挥巨大的作用。人类的运动功能被认为有两项主要能力组成:足部的步行能力和手的抓取操纵能力。人们已经做了很多用机器人结构来实现这些功能的研究。首先,人们对机器人手的研究比对机器人足部的研究更加积极,而且普遍认为机器人手比机器人足部更加先进。然而,在本田在1996年成功开发了仿人步行机器人(Hirai, Hirose, Haikawa, amp; Takenaka, 1998)以及之后的其他研究小组(例如,Sakagami等人,2002年;Kaneko等人,2004年;Ishida,2004年;Goualier等人,2009年)之后,机器人行走能力发展得如此之快让现在的我觉得发展机器人手熟练地抓取和操纵的任务变得更加紧急,而且它也是是让类人机器人真正能帮助人类的关键问题。本文调查分析了关于控制多指机器人手抓取和操纵的研究,尽可能地给出调查结果的物理含义。首先简要地介绍多指机器人手的发展史。然后给出抓取和操纵领域代表性的研究成果。关于抓取,解释了一些基本的分析概念包括力封闭/形封闭和主动封闭/被动封闭,以及介绍多种能有效抓取的抓取位置优化。关于操纵,展示了混合的位置/力控制方法和阻抗控制方法。本文也出现了我们最近关于柔性手指抓取和操纵和研究。最后讨论了一些未来的调查方向。
2.多指机械手
许多实验性多指机械手在过去的45年左右发展起来。在几代初始的机械手以后,用电脑控制的多关节机器人手被开发出来。代表性的有三指 Okada Hand(1979年)(冈田,1979年),三指斯坦福/JPL Hand(1981)(梅森和索尔兹伯里,1985年),三指犹他州/麻省理工学院(1984年)(Jacobsen,Iversen、Knutti、Johnson和Biggers,1986年)。所有这手都是用长的钢索将手的关节连到放置在单独大盒子里的驱动单元上。
然后在2000年左右,几只新的手被开发出来:四指DLR手(2000年)(Hirzinger等人,2000年),五指Robonaut Hand(1999年)(Lovchikamp;Diftler,1999年)和Five-FingeredGifu Hand(2002年)(川崎、小松和内山,2002年)。所有这些手都不使用钢索而是使用一些例如丝杠和差速齿轮等机械联结装置,驱动机构直接和手一体化,或者放在前臂里。它们也配备了许多传感器,但这些手的尺寸仍然比人手大一点。
最近可以用在类人机器人上的小尺寸手已经被研发出来了,比如Universal-Hand.(2005) (Hoshino amp; Kawabuchi, 2005) 和Shadow Dexterous Hand(2007) (SHADOW, 2010)。这些手有五个手指,而且是人手的大小。它们都是私有公司开发的。一个有趣的特征是它们都有着5个自由度的大拇指,这表现了设计者对大拇指重要性的看法。另一个小尺寸的五指手,称为dlr/hit-handi,也被开发出来了(Liu等人,2008年)。
最新的发展是双手被开发出来以达到它们被安装到类人机器人上的目的。一个是给HRP3P (2007) (Kaneko, Harada, amp; Kanehiro,2007)机器人的手,另一个是TWENDY-ONE Robot (2009)
(Iwata amp; Sugano, 2009)的手。这些手都有四个手指,后者有个有趣的特征是它的整个表面都被柔软的皮肤覆盖。
从这些发展成果来看,可以说机器人手的尺寸和结构功能性现在已经非常接近人手了。用这些实现具体的操纵任务的实验也已经被报道过。然而,这些任务的控制算法似乎是特定的,为了执行更广泛的抓取和操做任务,将需要更广泛的规划和控制框架。
3.抓取
在机器人手的抓取和操纵这两项密切相关的主要功能之间,抓握通常是其他操纵功能的先决条件。本节将对抓握的研究进行综述,重点是抓握分析和抓握规划。
3.1抓取的分析与综合
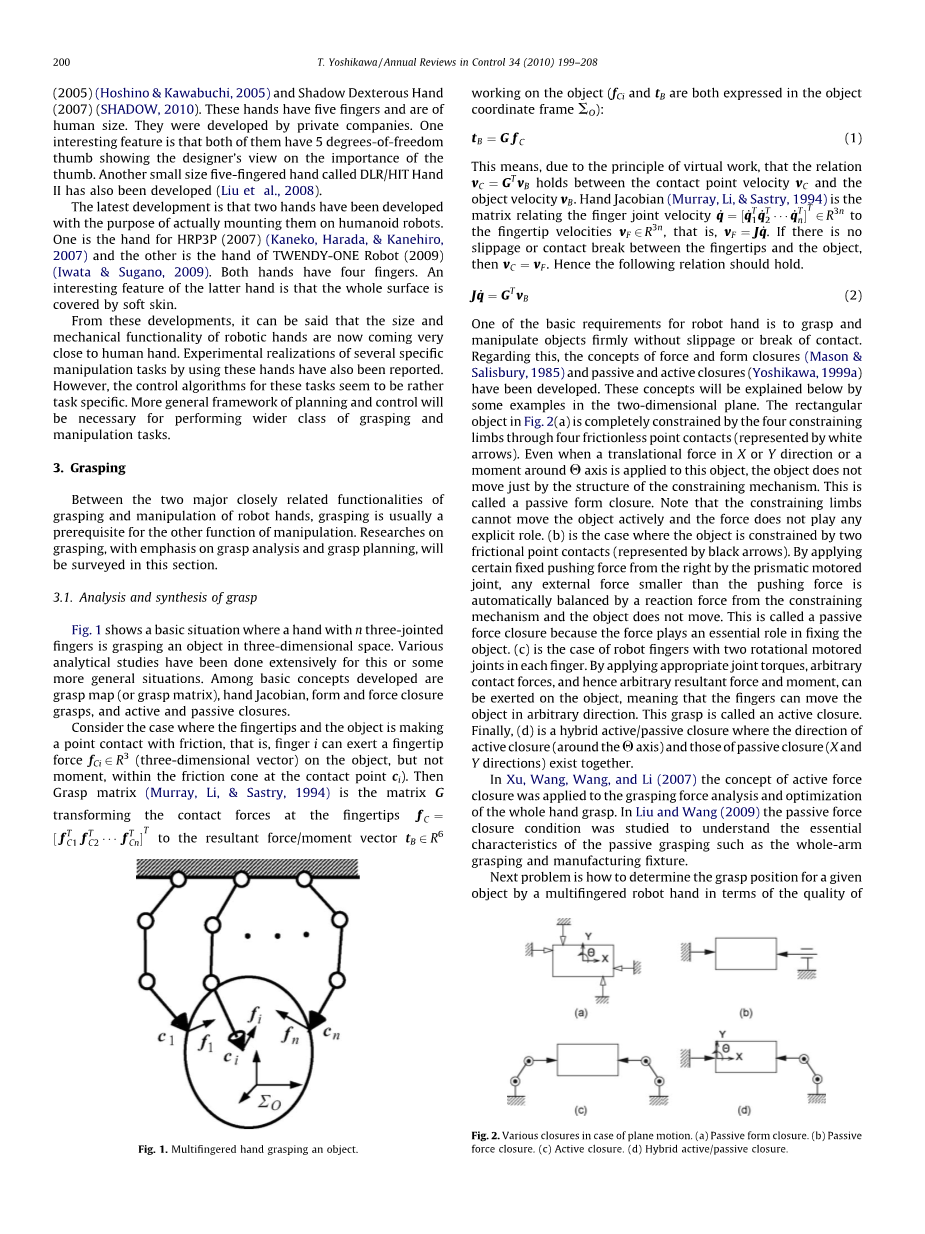
图1为三维空间中n个三关节手指抓取物体的基本情况。针对这一或一些更一般的情况,已广泛进行了各种分析研究。基本概念包括抓图(或抓矩阵)、手雅可比矩阵、形封闭和力封闭抓取、主动封闭和被动封闭。
图1.多指手抓取物体
考虑指尖与物体点接触摩擦的情况下,即手指i在物体上施加指尖力(三维矢量),但不是力矩,在接触点Ci处的摩擦圆锥内。然后抓取矩阵(Murray, Li, amp; Sastry, 1994)为将指尖接触力转化为作用于物体上的合力/力矩矢量的矩阵G(fci和tB均表示在对象坐标系Sigma;o中):
(1)
这就意味着,由于虚功原理,接触点速度#与目标速度#之间存在关系。手雅可比矩阵是联系指关节速度和指尖速度的矩阵,这便是。如果手指和物体之间没有滑动或断开接触,则。因此下面的关系应该成立。
(2)
机器人手的基本要求之一是能紧紧抓住和操纵物体而不发生滑移或断开接触。关于这一点,力封闭和形封闭 (Mason amp; Salisbury, 1985)和被动封闭和主动封闭(吉川,1999a)的概念得到了发展。下面将用二维平面中的一些例子来解释这些概念。图2(a)中的矩形对象通过四个无摩擦点接触(用白色箭头表示)完全受四个约束支的约束。即使在X或Y方向上的平动力或绕theta;轴的力矩作用于这个物体上,物体也不能只通过约束机构的结构运动。这被称为被动封闭。注意,约束支不能主动地移动物体,力也不能起任何明确的作用。(b)是物体受两个摩擦点接触(用黑色箭头表示)约束的情况。通过移动关节从右边施加一定的固定推力,任何小于推力的外力都会自动被约束机构的反作用力平衡,物体不会移动。这叫做被动力闭合,因为力在固定物体时起着至关重要的作用。(c)是指每根手指上有两个转动运动关节的机器人手指。通过施加适当的关节力矩,可以对物体施加任意的接触力,从而产生任意的合力和力矩,这意味着手指可以向任意方向移动物体。这种抓取称为主动闭合。最后,(d)是一个主动闭合与被动闭合的混合,其中主动闭合的方向(围绕theta;)和被动闭包的方向(x和Y方向)同时存在。
Xu, Wang, Wang, and Li(2007)将主动力闭合的概念应用于整个手部抓取力的分析和优化。Liu和Wang(2009)研究了被动力闭合条件,以了解被动抓取的基本特征,如全臂抓取和制造夹具。
图2平面运动时的各种闭孔。(a)被动形式封闭。(b)无源力封闭。(c)主动封闭关闭。(d)混合主动/被动封闭
下一个问题是如何根据抓取能力来确定多指机械手在给定物体上的抓取位置。这是一个尚未得到圆满解决的根本性问题。许多抓握能力指标已经被提出用于抓握优化( Shimoga, 1996,对1992年左右的文献进行了全面的调查,Strandberg amp; Wahlberg, 2006,对该主题进行了简短的总结)。
Kirkpatrick, Mishra, and Yap (1990) and Ferrari and Canny(1992)提出的,两个一般掌握措施介绍:他们是半径最大的球,集中在原点的力旋量空间,组中包含所有可能的力旋量,可以抵制通过应用允许手指力量沿着正常的物体的表面,定义为,在两种大小约束下对指尖的力,最大。Miller和Allen(2000)开发了一个用于抓握分析的模拟器GraspIt,并在1992年开发了法拉利和Canny的第二个抓取器(在的约束下)。并对所有的电阻力旋量的体积进行了评估。
考虑封配给手的操纵任务和可能发生的扰动力的一些能力指标也被提出来。Li和Sastry(1988)提出了一种基于任务椭球面概念的任务导向能力指标,它表示执行给定任务所需的所有力旋量的集合。波拉德(1994)提出了一种考虑物体形状的质量测量方法,该方法是基于物体表面所有可能的扰动力分布引起的力旋量组成的物体力旋量组。基于类似的思想,Strandberg和Wahlberg(2006)将抓取评价问题定义为最小-最大优化问题,并提出了一种高效的计算算法。渡边和吉川(2007)提出了一种利用所需外力集概念进行抓取优化的方法。
上述抓握质量的测量方法大多是根据指尖力来确定的。当需要在抓取后进行一些操作时,最好考虑其他因素,如操作能力和工作空间。然而,以一种综合的、物理上清晰的方式考虑这些因素的研究还相当缺乏。Park和Starr(1992)提出了一种用三指手抓取多边形物体的启发式准则。标准是没有直接关系的力量,但由一个加权和给出的五个方面:安排的力的方向,把握分配点,掌握对多边形的质心位置,凸顶点的数量,数量的掌握点附近的边缘。权重因子的选择是基于人类对多个样本对象的启发式直觉选择的最优抓取量。
3.2 用柔软的手指抓取
以上关于抓取的研究大多是针对刚性手指进行的,刚性手指使点与被抓取物体发生接触。然而,刚性手指在实际应用中有时存在稳定性和通用性问题。部分由于这个原因,手指可变形柔软的手也引起了很多关注(例如,Akella amp; cutkosky, 1989;Sinha amp; Abel, 1992;Shimoga amp; Goldenberg, 1996;Xydas amp; Kao, 1999;Arimoto, Nguyen, Han, amp; Doulgeri, 2000;长谷川村上,2003;Biagiotti、Tiezzi Vassura melchiorri, 2005; Yoshida, Arimoto, amp; Luo, 2008; Yamazaki, Inoue, amp; Hirai, 2009)。然而,迄今为止的分析研究仅限于相当简单的情况(主要是二维运动)。造成这一现象的一个主要原因是,为了推进对柔软手指的分析研究,我们需要考虑柔软皮肤的变形,但是要建立这种变形的性质模型是非常困难的。然而,尽管有这样的困难,预计未来将会开发出皮肤柔软的手,或者更普遍地说,全身覆盖着皮肤柔软的机器人,至少是人形机器人。
图3.机器人手系统
我们提出了一种对未知平面物体进行形状识别和最优抓取的方法(Yoshikawa, Koeda, amp;Fujimoto, 2008; Sugiyama, Koeda, Fujimoto, amp; Yoshikawa, 2009)用于一个机器人手系统,该系统由一只手和两个软手指、一只手臂和一个附着在手上的全方位相机组成(图3),指尖呈圆形,被弹性凝胶制成的柔软皮肤覆盖,如图4所示。
对于形状识别,我们将附着在手上的相机水平移动到物体周围,保持相机的高度不变,并从不同的方向拍摄物体的图像。然后应用体交法的二维版本(Laurentini, 1994),我们得到了水平面上的可视船体,它对应于物体的水平截面。
为了获得最佳抓取位置,我们提出了以下简单的抓取质量准则。
(3)
其中c1和c2为物体表面上的一对候选接触点(如图5所示)。第一项Jp(c1, c2)用于评估接触点的全局位置。第二项Ja(c1, c2)表示物体表面法线与接触点ci处抓取力方向夹角ai, kp和ka为权重系数。
第一项为
(4)
这个式子中Jp意味着接触点之间的距离da,应该小,物体的几何中心之间的距离和掌握线连接两个接触点,db,也应该小,反映出的直觉判断,操作能力和da时手比较大的工作空间小,这下物体的重量平衡重力会更好当db小。damax和dbmax是对这些距离进行标准化的常数。
图4.柔软指尖的内部结构
图5. 掌握质量标准的参数。
第二项为
(5)
其中ai为物体表面法线与接触点ci处抓取力方向的夹角。因此,这个术语的意思是抓取力的方向应该接近表面法线,这样才不会发生滑移。角ai在光滑表面的情况下是明显的,但是在角的情况下,我们需要更多地考虑它的定义。手指柔软的一个优点是,由于手指表面的变形,他们不仅可以在光滑的表面抓住物体,还可以在角落抓住物体。考虑到这一点,我们定义物体角ai如下。我们首先表示从角的右侧面的法向量到抓力方向的夹角为空气,左侧面的法向量为ail。然后我们将ai定义为区间[air, ail]的最小绝对值。例如,图6(a)中a1的值为0,图6(b)中a1的值为ja1l j,这对应于图6(a)中的抓取要比图6(b)中的抓取容易。
我们对不同截面的棱镜进行了抓取实验。图7为三角形棱镜的情况。从图中可以看出,棱镜在一个直观合适的抓取位置被成功抓取,其中一个角作为接触点。
(3) -(5)给出的准则仍然很直观。我们需要弄清楚这个标准对哪些对象类有效。我们正在研究(3)准则与人手测量握持位置之间的关系(Sugiyama et al., 2009)。一个物理意义更清晰,同时计算量不太大的实时使用标准是可取的。
图6.alpha;i表示的角<!--资料编号:[3452]



