水泥装袋机设计-码垛机设计毕业论文
2020-04-10 16:59:01
摘 要
本课题设计的是水泥袋装机——码垛机,其主要目的是针对所给水泥袋的尺寸,为其设计一种合适的码垛形式,并针对这个码垛形式设计一种码垛机,使其满足800袋/小时的要求等。就目前来说,国内的码垛机主要是依靠进口,国内的生产企业比较少,因此,水泥袋码垛机的设计对我国码垛机械行业的发展具有很高的利用价值。
为了能够设计出该水泥袋码垛机,首先是通过查阅跟码垛机有关的资料来进行理论部分的剖析,通过对比分析不同码垛机的结构特点等,选择设计一款机械式的码垛机,并对该设备的工作原理、装置组成和总体布局等进行了分析。
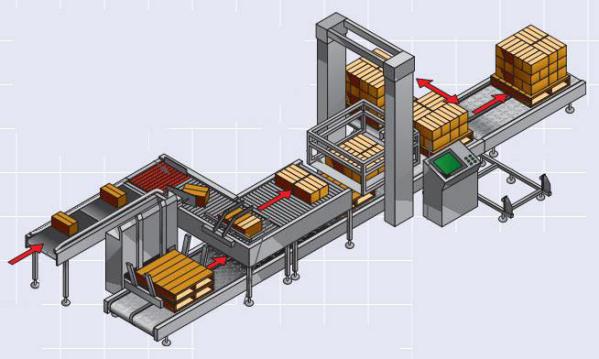
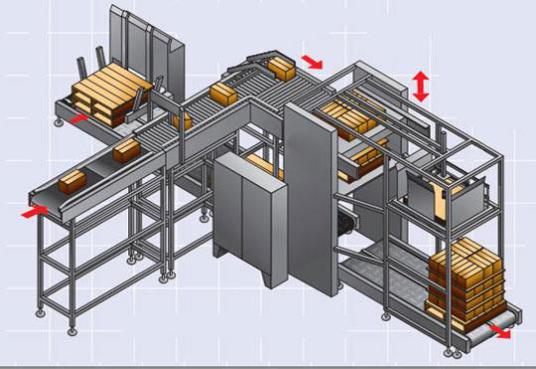
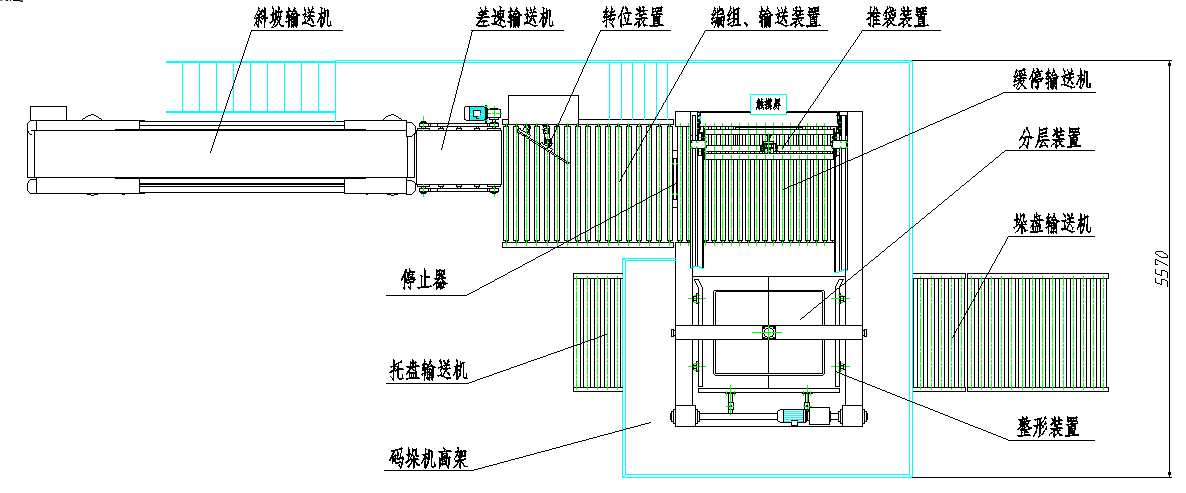
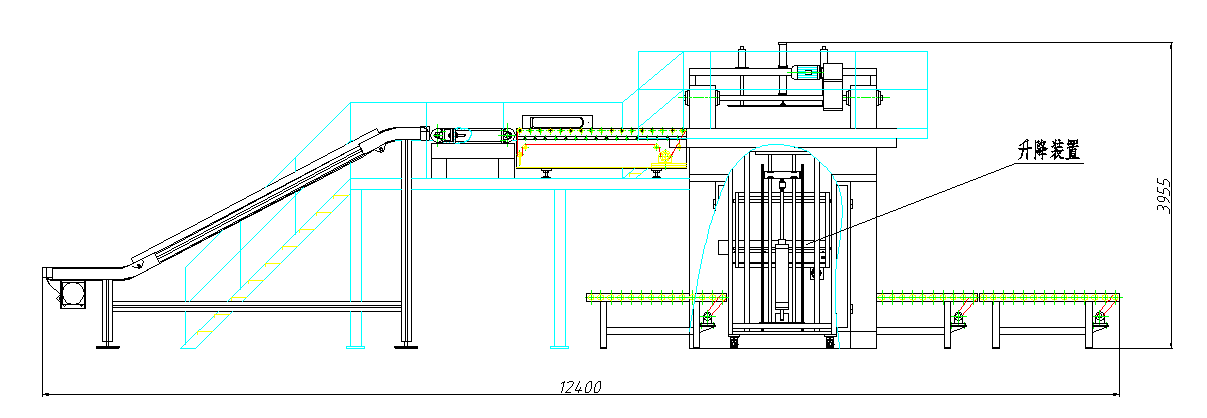
对高位码垛机主要设计的装置有:转位及编组装置、推袋装置、分层装置、整形装置、升降装置,次要设计的装置有斜坡皮带输送机和水平辊子输送机。通过对码垛机各个装置的动作分析,借鉴现有的其他码垛机的结构,为其选择合理的传动方式,设计简易的机构并计算其相关尺寸,利用Solidworks软件将其具体结构画出来。在转位及编组装置的设计中,先是对水泥袋的码垛形式进行选形分析和设计,然后才是根据对应的编组方式来设计转位机构和编组机。在推袋装置的设计中,主要是根据它的升降和直线推袋动作要求,它的传动方式为气缸带动升降和滚珠丝杠带动直线往返推袋。在分层装置的设计中,考虑到两分层板同时散开以及同时闭合动作,选择了同步带来对它进行传动。在升降装置的设计中,主要是考虑其传动方式,为了能够准确实现升降动作,通过液压缸加伺服阀来准确定位,和链条来带动其升降。在码垛机的控制系统部分,通过对码垛机的动作顺序分析,使用Word软件绘制出它的动作总流程图和各主要部分的流程图。
最后,经过前面的设计计算以及三维建模,利用Auto CAD等软件将水泥袋高位码垛机的总装图、主要部件图和零件图绘制出来。
关键词:水泥袋;码垛机;高位码垛机;控制系统
Abstract
This project is designed for a cement bag machine, a palletizing machine. Its main purpose is to design a suitable palletizing form for the size of a given cement bag, and to design a palletizing machine for this palletizing type. Make it meet the requirements of 800 bags/hour. At present, the domestic palletizing machine mainly relies on imports, and there are few domestic production companies. Therefore, the design of cement bag palletizing machine has important practical significance for the development of palletizing machinery industry in China.
In order to design the cement bags stacker, the first part is to analyze the theoretical part by referring to the information related to the palletizer, The structural characteristics of different palletizing machines are compared and analyzed, and selecting a mechanical type. And analyzed the working principle, device composition and overall layout of the palletizer.
The main designed devices for the high palletizers are: transposition and grouping devices, push bag devices, tiered devices, shaping devices, lifting devices, and the secondary devices are slope belt conveyors and horizontal roller conveyors.Through the analysis of the motions of each device of the palletizing machine, the existing structure of other palletizers is used to select a reasonable transmission method, and a simple mechanism is designed to calculate the relevant dimensions.Use Solidworks 3D modeling software to draw out its specific structure.In the design of the indexing and grouping device, the shape and analysis of the concrete pallets are firstly analyzed and designed, and then the indexing mechanism and the grouping machine are designed according to the corresponding grouping methods. In the design of push-pull device, it is mainly based on its requirements for lifting and straight-line pushing bag movements. Its transmission mode is cylinder driven lift and ball screw driving straight-line push-pull bag.In the design of the layering device, considering that the two layered plates are simultaneously dispersed and simultaneously closed, the synchronization belt is selected to drive it. In the design of the lifting device, the transmission mode is mainly considered. In order to be able to accurately perform lifting and lowering operations, the servo valve is precisely positioned by the hydraulic cylinder and the chain is used to drive the lifting. In the control system of the palletizer, through the analysis of the sequence of operation of the palletizer, the general flow chart of its actions and the flow charts of the main parts are drawn using Word software.Finally, through the previous design calculations and three-dimensional modeling, the assembly drawings, main parts drawings, and parts drawings of the cement bag high palletizer were drawn using software such as Auto CAD.
Key Words:Cement bags;Palletizer;High level palletizer;Control system
目 录
第1章 绪论 1
1.1 设计任务分析 1
1.2 目的及意义 1
1.3 码垛机的国内外研究现状分析 2
1.4 设计的基本内容、目标 5
1.5 采用的技术路线 5
1.6 本章小结 6
第2章 码垛机的总体方案设计 7
2.1 码垛机的整体结构布局 7
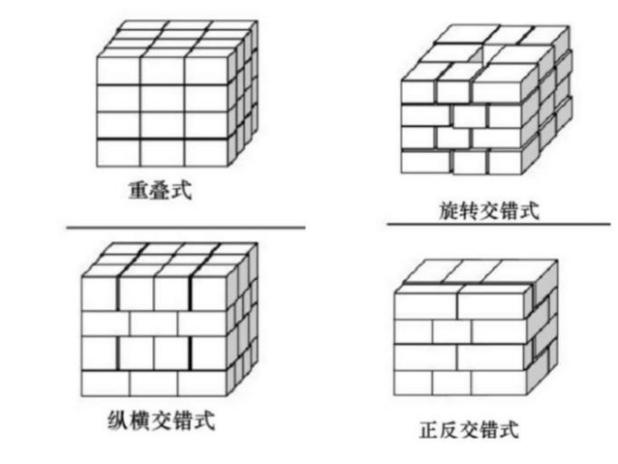
2.2 水泥袋码垛形式的选择 8
2.3 输送装置的选择 9
2.3.1 输送机的类型 9
2.3.2 码垛机各部分输送装置的选择 11
2.4 换向装置的选择 11
2.5 升降装置的选择 12
第3章 码垛机主要装置的设计 13
3.1 整形编组结构设计 13
3.1.1 编组方式的设计 13
3.1.2 转位装置的设计 13
3.1.3 编组停止器的设计 15
3.1.4 推袋装置的设计 15
3.2 分层装置的设计 20
3.2.1 同步带传动的失效形式与计算准则 21
3.2.2 同步带的设计计算与带轮选型 21
3.2.3 整形气缸的选型 23
3.3 升降装置的设计 24
3.3.1 液压缸的选用 24
3.3.2 链轮的结构设计 25
第4章 码垛机输送装置设计 27
4.1 带式输送机的设计及计算 27
4.1.1 技术参数 27
4.1.2 带式输送机的结构组成及布置形式 27
4.1.3 带速的计算 28
4.1.4 斜坡输送机的三维模型 29
4.2 辊式输送机的设计及计算 29
4.2.1 技术参数 29
4.2.2 辊式输送机的结构 29
4.2.3 基本参数计算 30
4.2.4 辊子输送机的三维模型 31
第5章 码垛机的控制系统 32
参考文献 36
致 谢 38
第1章 绪论
1.1 设计任务分析
根据水泥袋的尺寸60cm*40cm*25cm,为其设计一种合适的码垛形式。在满足要求为每小时码垛20t的情况下,将传送带输送过来的水泥袋(已经充填,每袋25kg)进行排列,然后将其堆码到一个托盘上。根据上述任务要求,需要为其设计一个码垛机。
1.2 目的及意义
所谓码垛[1],就是将很多产品堆放在一个支撑板上,一般是木头做的托盘,以使得产品搬运变得方便、快捷。产品经过码垛后,可以使得它所占的空间面积变小,而且还便于保存和搬运,提高了工作效率高,所以对包装件的码垛是一个必不可少的环节[2]。而且在包装件码垛的过程中,它不是随意地摆放,而是有一定基本要求的[3],即稳定、合理、匀整、定量、节约和便捷等。
码垛的方式一般有人工码垛和机械自动码垛[4]。一般的人工码垛如图1.1所示,它是以人力搬运的形式完成的, 使用人力把托盘先摆在地上, 再逐步把物品按既定规则排列放在托盘上面。这种人工码垛的方式具有码垛质量低、重复性差和容易倒垛等缺点, 会使得产品的破损率增加。这种情况尤其经常出现在那些重心不稳的产品中, 如编织袋装产品、高重心产品、轻质物品等。此外,人工码垛不仅会使得工人的劳动强度增大,管理成本高,而且还制约了企业的发展。机械自动化堆垛如图1.2所示,自动化的码垛机拥有标准化的机械构造,不仅操作简单,运行稳定可靠,而且出现的故障率低,比较安全。某水泥厂为了提高效率、降低生产成本,计划使用码垛机代替人工进行水泥的码垛。因此,本文以该企业的实际生产情况,对袋装水泥码垛机进行分析及设计,使其更好的进行码垛作业。 |
|
 图1.1 人工码垛
图1.1 人工码垛 图1.2 机械自动码垛
图1.2 机械自动码垛码垛机是现代生活中一个比较关键的生产技术设备,它按照一定的顺序和规律排列袋类、箱类等,并将它们放在托盘上码放成垛[5],方便存储和运输。当前,我国大型厂家的包装时速一般为1400包/h。但随着产能的扩宽,一些公司的生产线逐步使用外购的高生产率的定量包装机器,例如,一家规模较大的水泥厂的装袋时速达到2000袋/h,但同时海内厂商的码垛机难以与之匹配,码垛比生产速度还慢已变为一个尖锐的问题。据报道,为了应对这种情况,一些公司甚至被迫使用很多的工人用肩扛背挑形式码垛,此方法不仅效率低,而且还增加了生产的本钱。自动码垛机的投入使用,可使现有的水泥袋码垛成为无人值守的作业,代替人力在厂里的码垛作业,避免工人发生尘肺等职业病。将恶劣环境下的人工操作转变为机器自动操作,对于改善企业的工作环境,减少工人的体力劳动,降低员工生产力发挥了关键作用,对于袋装水泥的高效率码垛作业具有重要意义。
1.3 码垛机的国内外研究现状分析
自动化的码垛设备总体可以分为机械式和机器人码垛机这两大类,如图1.3和1.4所示。
|
|
 图1.3 机械式码垛机
图1.3 机械式码垛机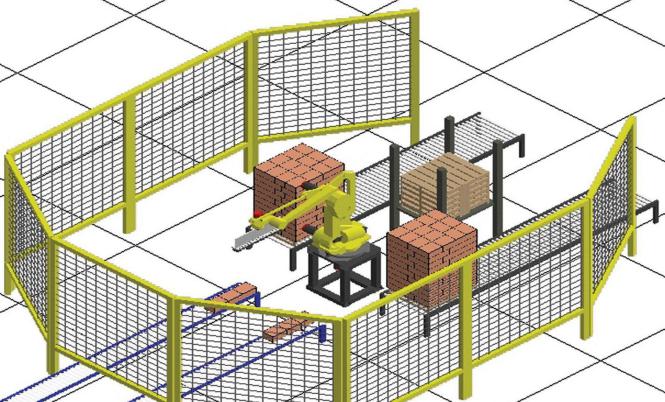 图1.4 机器人码垛机
图1.4 机器人码垛机自1960年以来,美国、德国等工业先进国家先后开发出半自动、全自动机械码垛机,并不停完善和优化机械结构等方面,并普遍应用在石化粉末制品、肥料、制药、食品和水泥等箱包的码垛工作中。在这之后,国外码垛机的研发主要是面向码垛机器人这方面。1974年,全世界首台完全电子控制的工业码垛机器人IRB6[6]在瑞典ABB被开发出来,它是用在工件的拾放和物料搬运等方面。随着科学技术的飞速发展,欧美等发达国家开发了自己的机器人码垛机,如德国KUKA、瑞典ABB、日本FANUC及YASKAWA等[7]。经过多年的研究和开发,2017年,荷兰欧洲西门子CSi系统有限公司的全自动机器人智能码垛机i-Pal[8]-[9]正式进入美国中小企业市场。该机器可以一次抓取多个盒子,达到40盒/分钟。可以说目前国外对于机器人码垛机的核心技术掌握得相当熟练,而我们的发展只能从机械式码垛机上下手,争取在这方面有所突出。
我国的码垛机械和设备始于20世纪80年代早期,一些国内厂家和研究机构在借鉴国外技术的基础上,渐渐设计和开发出了几种类型的码垛机。它们还被用于化学肥料和其他粉末产品的包装生产线,为码垛机械的本地化创造了良好的开端。从二十世纪八十年代初开始,国内的一些科研和生产企业开始设计和开发滚筒式码垛机。那时重点以仿型为主[10],即根据欧美同类码垛机的型式,结合国内设计和开发的制造水平,为国内码垛机奠定了基础。到8O年代中叶,本国一些科研和生产企业,开始设计开发气垫式码垛机[11]。在80年代末,中国的一些科研单位研制和开发了一种机器人自动码垛机。
近几年,许多企业技术人员已经开始借鉴国外先进技术,努力研发接近国外规范的码垛设备,在标准水平,制造工艺等方面都有了巨大的进步。在2000年,哈尔滨博实已成功开发出一种高效的包装设备,可以自动称量、包装和码垛,码垛达到1200袋/h。基于每小时800个包装的原始包装设备,开发了这套用于自动称量,包装和堆放粉状颗粒材料的设备[12]。通过加快取袋、装载和码垛的速度,生产效率提高了三分之一,自动化性能和整体水平大大提高。自2006年以来,邯郸机械有限公司的技术人员开始研究设计高速高端码垛机。直到2008年,这两台全自动高速高位码垛机样机成功被研发,并在澳门一家水泥厂投入应用。其最高码垛能力达到每小时2200包,并且每小时可以稳定运行约2000袋。据了解,国内自动码垛机的最大产能仅为1600包/h,稳定工作时间一般是1400包/h。
海外码垛机的发展比较快速,在码垛机的自动、智能和稳定等方面都居于领先地位。到现在为止,本国生产的码垛机在很多方面已逐渐接近或达到国外同类型码垛机的技术性能及各项参数,已大概能满足大中型厂家产品码垛的需求,但与国外先进水平相比,大多数从德国、日本等进口的许多大型石化厂家所使用的包装及码垛设备,不仅要消耗大量的外汇,而且在技术上也摆脱不了对国外的依赖性。其主要问题是:
①缺乏主要控制技术
2013年,中国对工业机器人的消费巨大。根据中国机器人联盟的数据[13],2014年中国工业机器人销售数量达4.5万台,并预计到2017年可能达到10万台。但是在中国市场份额中,外国机器人制造公司占近80%,库卡、ABB、日本富士通和川崎的四家外国公司共占据码垛机市场份额的65%左右。之所以如此是因为码垛机器人的核心技术的缺乏,在中国具有真正独立研发和制造能力的企业很少参与系统集成服务,即所谓的代理商。
②零件质量低
眼前国内码垛机械零件加工仍位于小批量生产时期,与国外同类产品相比,加工精密度和质量仍存在一定差距。因此,调试后维护工作量多,有效寿命短。尤其是对经常移动的重要零件,还缺乏批量生产的特定设备。例如,气垫托盘的制造仍然采取相对简单的加工形式。因此,生产后的一些气垫盘不能充分密封并存在漏气。因此,维护工作量很大。
③控制系统的主要组件性能差
目前,在控制系统部件方面,与海外先进部件相较,码垛机的性能和使用寿命之间存在一些差距。有些定位不准确,导致操作失败。因此,生产中的维护和替换工作非常繁重。
④码垛效率低
通常来说,码垛容量大概维持在20t / h,对正常生产的要求依然可以确保。如果要达到30吨/h以上,就需要深入改进和完善。
在经济全球化的影响下,从国内码垛机的设计、使用等各个角度来看,其发展前途非常好。尤其是中国当前拥有一些全身心投入到全自动机械码垛机研发的科研队伍,累积了一定的制造和操作经验。这为码垛机生产技术的发展奠定了良好的基础。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: