纸箱真空搬运码垛机设计毕业论文
2020-04-12 16:46:40
摘 要
随着科学水平技术的不断提高,机械设备也发生了翻天覆地的变化,以机械为主的传统的手动操作机械设备以逐步被由电脑和其他零件控制的现代化机械设备所替代,工业技术发展迅速,尤其是近代工业机械的发展,近代的工业机械手是由目机器的本体、控制器系统、传感装置系统、控制系统和伺服动力器系统组成,是一种模仿人的操作、自动化控制、可多次编程、能在立体空间完成各式各样作业的Mechatronics设备,用机械智能操作代替人工手动,这不得不说是我国现代技术的一个大的跃进。
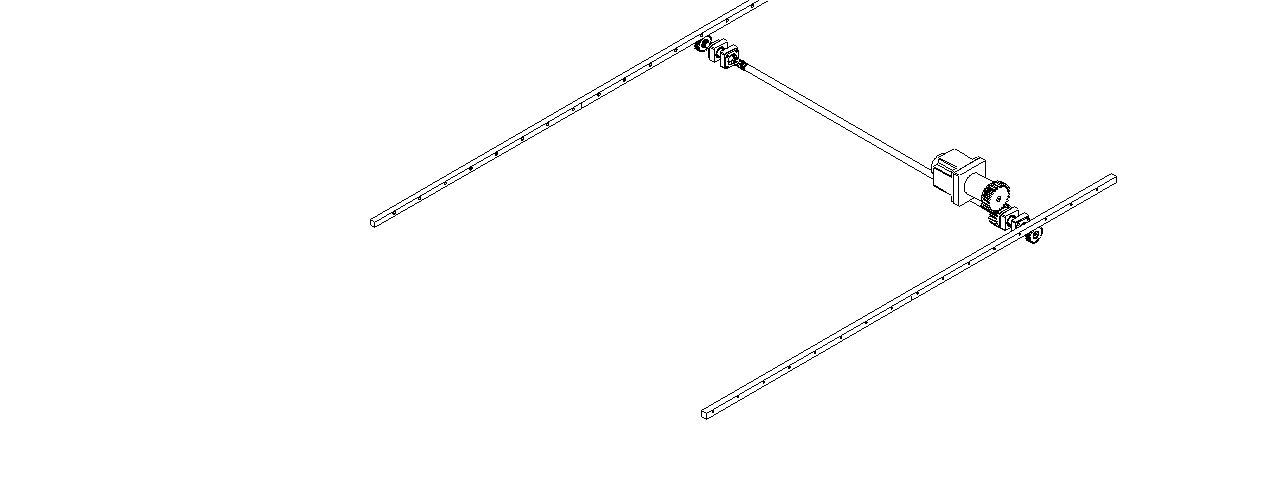
本设计以实际生产线为基础,设计一个龙门式码垛机,它的主要作用是将生产线输送来的包装箱或料袋按照预设的码垛要求自动堆叠成垛。本次设计借鉴以往的码垛机设计方案,并对国外的码垛机结构和设计思路进行整合,比较完整的设计出适合此次设计要求的龙门式码垛机。所设计的龙门式码垛机,结构上有四个自由度,X轴方向上采用步进电机带动齿轮传动,Y轴方向上和X轴采用一样的步进电机带动齿轮的方式传动,Z轴方向为了使吸盘的运动比较流畅也采用步进电机带动齿轮传动,末端执行器采用真空吸盘,用负压真空来提起纸箱完成码垛工作。本次设计的码垛机能高效快捷的完成纸箱的码垛,直接用机器进行控制生产,不仅更加的高效便捷,而且可以节省大量的人力,从而更好的节约了资本,更符合现代化的生产方式。
关键词:龙门式码垛机 纸箱搬运 真空吸盘
Abstract
With the continuous improvement of the scientific level of technology, mechanical equipment has also undergone earth-shaking changes. The traditional manually operated machinery and equipment based on machinery have gradually been replaced by modern machinery and equipment controlled by computers and other parts, and industrial technology has developed rapidly. In particular, the development of modern industrial machinery, the modern industrial robot is composed of the body of the target machine, the controller system, the sensing device system, the control system, and the servo power system. It is an imitative human operation, automatic control, and many Sub-programming, Mechatronics equipment that can perform all kinds of operations in three-dimensional space, using mechanical intelligent operation instead of manual manual, it has to be said is a big leap forward of modern technology in our country.
This design is based on the actual production line, design a gantry type palletizing machine, its main role is to automatically pack the containers or bags delivered from the production line into pallets according to the preset palletizing requirements. This design draws on the previous palletizing machine design scheme, and integrates the foreign palletizer structure and design ideas, and designs a complete Gantry type palletizing machine that is suitable for this design requirement. The designed gantry type palletizing machine has four degrees of freedom on the structure. The stepping motor drives the gear transmission in the X-axis direction. The Y-axis direction uses the same stepping motor as the X-axis to drive the gears, and the Z-axis. Direction In order to make the suction cup move more smoothly, a stepper motor is used to drive the gear transmission. The end effector uses a vacuum suction cup, and the negative pressure vacuum is used to lift the carton to complete the palletizing work. The palletizing machine designed this time can efficiently complete the stacking of cardboard boxes and directly control the production with machines. It is not only more efficient and convenient, but also can save a lot of manpower, thereby saving capital more, and more in line with modern production methods.
Key Words:Gantry type palletizing machine;Carton Handling; Vacuum Suction Cups
目 录
第1章 绪论 1
1.1码垛机的概念 1
1.2课题研究的背景和意义 1
1.3国内外研究现状 2
1.4课题研究的内容和目标 2
第2章 总体方案设计 3
2.1设计对象和要求 3
2.2设计原理 3
2.3 码垛机总体设计 4
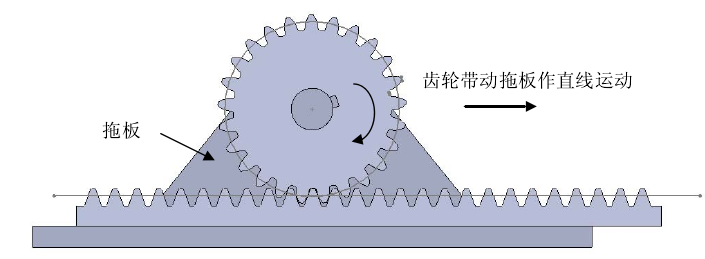
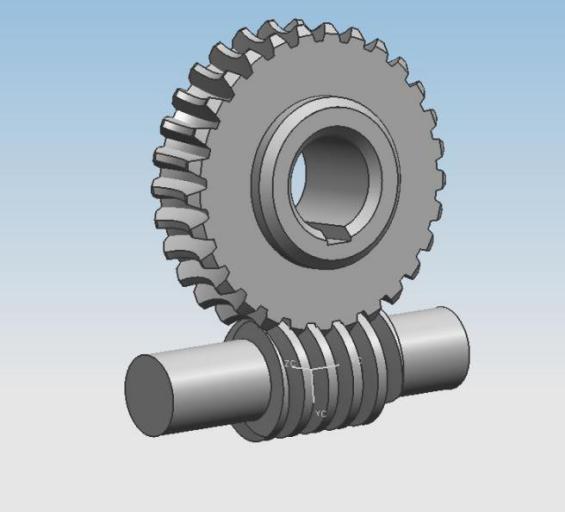
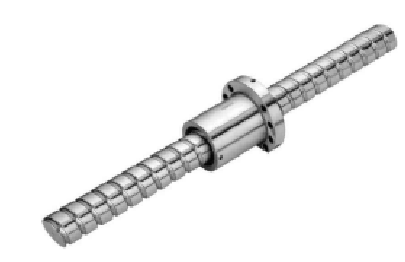
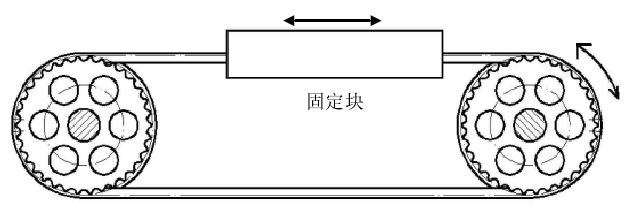
2.4传动方式设计 4
2.5驱动装置的设计 7
2.6 设计小结 8
第3章 设计计算 9
3.1真空吸盘抓手的设计 9
3.1.1 整体结构设计 9
3.1.2 真空系统的设计 9
3.1.3 力学分析 9
3.2 X轴方向的设计 10
3.2.1 X轴传动装置设计 10
3.2.2 X轴电机的计算过程与选型 10
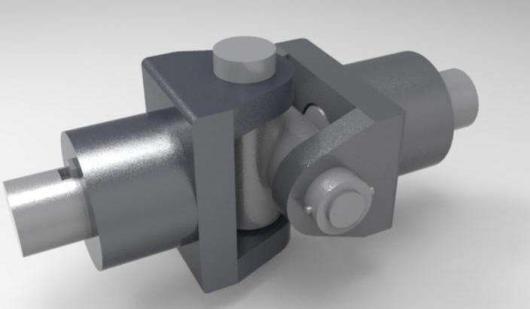
3.2.3 联轴器的选择和设计 12
3.2.4 X轴齿轮的相关计算与选型 13
3.3 Y轴方向的设计 15
3.3.1 Y轴传动装置设计 15
3.3.2 Y轴电机的计算过程与选型 16
3.3.3 Y轴齿轮的相关计算与选型 16
3.4 Z轴方向的设计 18
3.4.1 Z轴传动装置设计 18
3.4.2 Z轴电机的计算过程与选型 18
3.4.3 Z轴齿轮的相关计算与选型 19
3.5 机架的设计 20
3.5.1 机架的设计要求 20
3.5.2 机架的设计方案 21
3.5.3 机架尺寸设计 22
3.5.4 机架强度的校核 23
第4章 结论 25
参考文献 26
致 谢 27
第1章 绪论
1.1 码垛机的概念
码垛是指根据一定的操作流程,把物品按照指定的方式方法摆放整齐,从而使之规律化和效率化的过程,它可以通过电子智能的方式直接使物品按照设定的程序自动堆叠好,大大提升了工厂工作效率。尤其是随着科学技术的发展和物流技术的快速提升,生活中产品的需求量越来越大,在生产的过程中人工的搬运码垛已经跟不上生产的节奏,因此开始有码垛机出现在工厂里面,从刚开始的简单的码垛机,只能运用气动和液压来驱动几箱或几台产品,到现在的机械人码垛机,一次能码垛几十箱或几十台产品,。跺码的效率在不断的提高,尤其是跺码机器人的出现,更是使跺码生产水平出现了质的飞跃,从传统的人工操作,到现代的智能机器,不可同日而语。当然,这也标志着跺码上升到了一个新的阶段,不再是传统的手工业时代,而是智能机械时代,这一技术性的飞跃,不仅仅是节省了大量的人力物力财力,更是我国传统机械的一大跨越。因此研究码垛机的设计技术有着较大的工程应用价值。[1][10]目前工业上普遍应用的自动化码垛方式主要有关节式码垛机器人、摆臂式码垛机器人和龙门式码垛机器人,相应的模型如下图1.1、图1.2和图1.3所示:

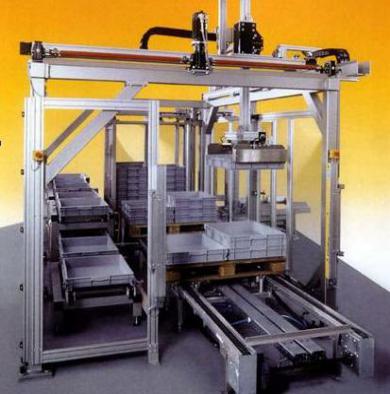
 图1.1关节式机器人 图1.2摆臂式机器人 图1.3龙门式机器人
图1.1关节式机器人 图1.2摆臂式机器人 图1.3龙门式机器人
1.2课题研究的背景和意义
产品的物流运输系统主要分为四个部分,既产品包装,跺码,存储和运输。其中跺码在其中占有重要的地位,这一重要地位不仅表现在成本上,更突出表现在物流安全上。众所周知,搬运是一项极耗费人力物力的事,首先搬运物品需要大量的体力劳动者,这是一笔不少的开支,其次搬运也是发生事故的高频区,几乎一半的安全事故都发生在物流上,在搬运过程中,可能会发生各种各样的安全事故,因此,跺码技术的进步和成熟,不仅有利于企业节约成本,把资金投放在企业发展上面,而且也更在某种程度上保障了工人的安全。但是到目前为止,我国的跺码搬运技术与发达国家相比仍旧有较大的差距,技术上仍有较大的空缺,因此,我们国家迫切需要专业技术人才,通过不断的研发和创新,研发出我国自己的工业机器人。对此,国家出台一系列政策,给予大量的研究经费,迫切需要从资金依赖型转变成人才创新型的转变,因为这些高新技术和智能化技术的发展,不仅代表了一个国家的工业自动化水平,可以让世界认可你,在世界工业技术上占有一席之地,更重要的是,跺码技术的成熟能能切实保障我国公民的身体健康和生命安全,毕竟工厂的环境较差,各种产品堆砌,属于相对密闭的环境,空气质量较差,再加上各种机器发出的轰鸣声和各种噪音的嘈杂等,这所有的一切都对人的身体有较大的损害,加速人各种器官的衰老,甚至于一不小心可能被机器伤害危及生命。但是自从发明机械人以后,相应各种难题迎刃而解。码垛机器人就是作为机器人其中一种,码垛机器人是机、电一体化高新技术的产品,能将人从恶劣的环境中替换出来,切实有利于人的安全的企业的高效发展。因此,研究出一种高效率、高负载能力的自动化码垛机器人设备是十分有必要的。
1.3国内外研究现状
目前,世界上的四大码垛机器人巨头是KUKA、FANUC、ABB和YASKAWA,这四个公司都是发达国家的,在众多国家中,以美国和日本为翘首,他们几乎垄断了整个跺码市场,占市场份额的80%,从这一惊人的数据我们可以看出,我国码垛机器人技术仍然和其他发达国家还有不小的差距,这一巨大的差距虽说与我国进入工业社会较晚这一历史进程密切相关,但是与我国企业的生产模式与理念也密不可分,正因为我们国家没有形成机器人产业链,所以中小型企业都是应客户的要求来生产,没有一个统一的标准,种类虽然多,但都是小规模且大多不稳定。并且,在很多时候,中小型企业负担不起也无力负担大量的科研经费从而形成自己的产业链,所以,这也造成了他们购买国外的产品直接进行生产的现状,根据客户的需求来进行选择,所以,这就需要引起我们的重视,这不是一个两个企业所需要承担的责任,这是我们整个国家所需要重视的事,我国必须承认我国工业化水平还不高这一既定事实,努力探索创新,由中国制造到中国创造的飞跃,重视自主创新才能赶上其他国家,进行世界先进技术行列之中。
1.4课题研究的内容和目标
本次课题主要是研究一种新型的跺码机器,更好的适应现代工厂的需要,切实解决工厂工作中产品物流的堆砌搬运问题,通过实地考察和调查,对目前跺码技术有了进一步的认识和了解,从而更有利于设计出符合需要的跺码机器。
具体的设计内容分为以下几个步骤,首先确定码垛机的种类,从几种码垛机中选出适合的一种并进行初步的结构设计,然后进行其他设计和校核。
第2章 总体方案设计
2.1设计对象和要求
码垛对象 | 一箱牛奶 |
码垛使用的托盘 | 1200mm*1200mm木制或塑料 |
码垛的时间要求 | 1分钟移动6箱以上 |
物件的尺寸 | 350mm*200mm*150mm |
物件的重量 | 5~15kg |
码放方式的要求是在托盘尺寸内每层尽可能多地堆码产品,并且要保证纸箱的平稳和结构紧密性,不能让他在运输的过程中倒塌或者位置改变。在码垛的过程中,完成码垛的垛堆随着高度的增加越来越不稳定,所以此次码垛高度为8到10层。
2.2设计原理
在牛奶的生产过程中,根据生产的需要,需要将生产线上的已经装箱的牛奶一箱一箱地移位到码垛的托盘上,由于外包装为纸箱。采用抓取或夹持的机械爪有可能会破坏纸箱,让产品看起来不是那么美观。因此选择采用真空吸盘,纸箱类的产品表面光滑并且没有太大的变形,所以这种吸盘类的末端执行器可以较好的完成这次牛奶搬运动作。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: