基于PID算法的水箱液位控制系统设计毕业论文
2020-02-19 18:59:46
摘 要
在科学技术日益发展的今天,液位控制系统广泛应用于各行各业,包括了传感器、控制理论、硬件设计和控制算法等多方面的知识和内容,在硬件条件不断完善和丰富的背景下,控制算法的重要性日益突出。液位控制系统在人们的生活中发挥着重要的作用。液位作为一种重要的被控对象,不仅是工业过程控制中十分常见的参数,而且拥有便于观察、容易测量的优点。
本次设计采用超声波模块作为检测液位的传感器,不仅可以实现非接触式测量,还具有良好的环境适应能力和较高的精度。设计目标的是实现对双容水箱的串级控制,同时通过对单闭环液位控制系统与串级液位控制系统的比较,体现了串级液位控制的优越性。本设计首先分析了双容水箱的对象特性,建立数学模型并求取了系统的传递函数。其次设计了PID控制器,整体介绍了PID控制算法及其参数整定,说明了具体的调参过程,并在Matlab/Simulink软件中进行系统仿真研究,对PID参数进行了整定后得到了仿真曲线。然后演示了本次的实物成果。最后对本次研究的不足与未来展望进行阐述。
关键词:过程控制;双容水箱;液位控制;PID控制
Abstract
Today, with the development of science and technology, liquid level control systems are widely used in various industries, including sensors, control theory, hardware design and control algorithms. In the context of continuous improvement and enrichment of hardware conditions, The importance of control algorithms is becoming increasingly prominent. Liquid level control systems play an important role in people's lives. As an important controlled object, liquid level is not only a very common parameter in industrial process control, but also has the advantages of easy observation and easy measurement.
In this design, the ultrasonic module is used as the sensor for detecting the liquid level, which not only can realize non-contact measurement, but also has good environmental adaptability and high precision. The design goal is to realize the cascade control of the double-capacity water tank. At the same time, the superiority of the cascade liquid level control is realized by comparing the single closed-loop liquid level control system with the cascade liquid level control system. This design first analyzes the object characteristics of the dual-capacity water tank, establishes a mathematical model and obtains the transfer function of the system. Secondly, the PID controller is designed. The PID control algorithm and its parameter tuning are introduced. The specific tuning process is explained. The system simulation research is carried out in Matlab/Simulink software. The PID parameters are adjusted and the simulation curve is obtained. Then demonstrate the actual results of this time. Finally, the shortcomings and future prospects of this research are elaborated.
Key words:process control; dual tank;liquid level control; PID control
目录
第1章 绪论 1
1.1课题研究背景及意义 1
1.2国内外研究现状 1
1.2.1国外研究现状 1
1.2.2国内研究现状 1
1.3控制理论发展历程 2
第2章 水箱液位系统设计 2
2.1 双容水箱模型建立 2
2.2 数学模型求解 3
2.3水箱液位模型系统方案设计 6
2.3.1总体方案设计 6
2.3.2控制方案设计 6
2.3.3系统技术指标与设计要求 7
2.4 PID控制算法 7
2.4.1 PID控制算法简介 7
2.4.2 PID控制算法公式 8
2.4.3 PID各环节的调节 9
2.5系统硬件电路设计 10
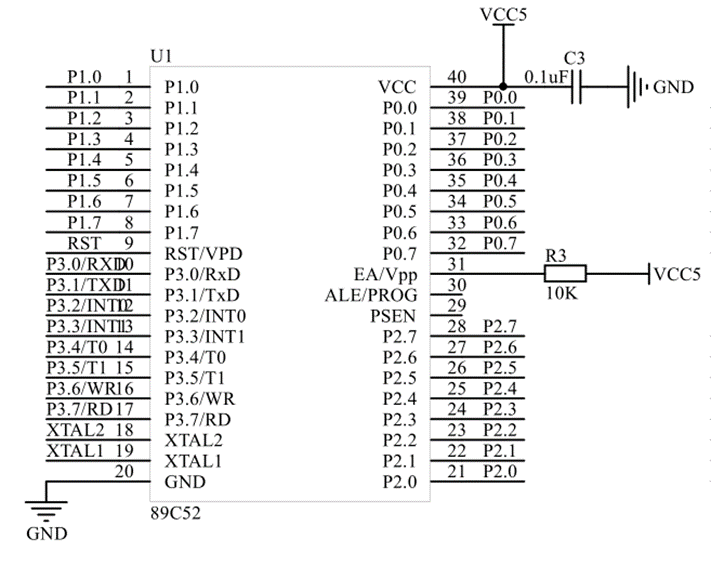
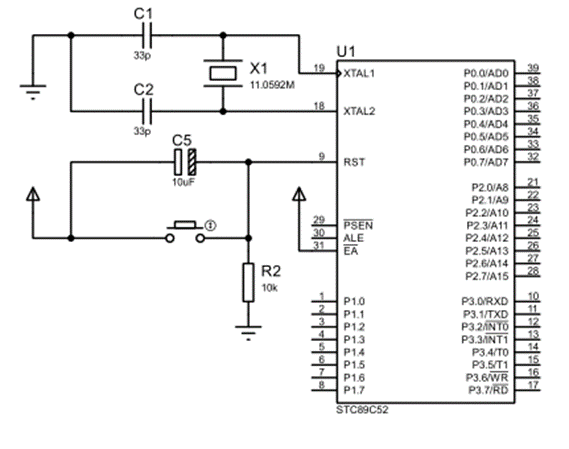
2.5.1系统主控制器 10
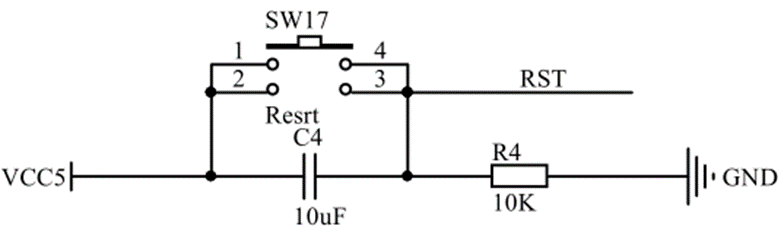
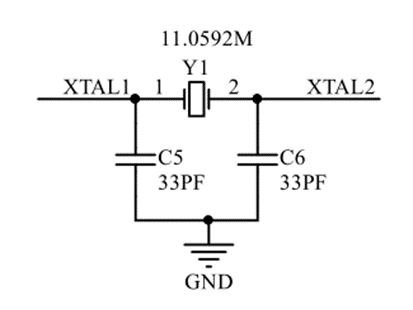
2.5.2单片机最小系统 11
2.5.3传感器选型 12
2.5.4水泵及其驱动电路 14
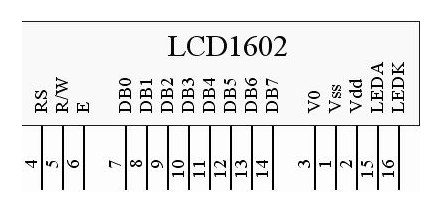
2.5.5液晶显示电路 15
2.6串级控制系统 16
2.7本章小结 16
第3章 水箱液位控制系统仿真 17
3.1总体仿真设计 17
3.2仿真参数整定 19
3.3扰动对系统的影响 24
3.4本章小结 27
第4章 水箱液位系统仿真验证 28
4.1系统软件流程图 28
4.2 PID算法程序设计 29
4.3 Proteus仿真图 30
4.4实物演示 31
第5章 总结及展望 32
5.1论文总结 32
5.2存在不足及展望 32
参考文献 34
附录 36
致谢 38
第1章 绪论
1.1课题研究背景及意义
随着工业生产的不断进步,一些全新先进的生产技术以及生产方式逐步应用于工业领域,不断促进着生产发展。在工业生产中,有非常多需要使用水进行冷却或者作为添加剂的应用场景,在生产中扮演着不可或缺的作用。工厂中为了方便水的供给,一般会有水箱供给设施,双容水箱模型是常见的供给装置之一,具备较强的综合性。涉及到智能控制、流体力学等多种学科。目前有非常多的双容水箱模型设计,为了控制其水量,一般设置上水箱入水量为操控量,下水箱的液位高度为被控量,主要的控制方式有 PLC、单片机以及模拟仪表等,液位控制的准确性和其控制稳定性直接影响到了工场的成本、经济效益甚至是设备的安全。为了更加智能的控制液位高度,实现液位高度的闭环控制,PID控制策略已经广泛应用于双容水箱控制液位。
1.2国内外研究现状
1.2.1国外研究现状
国外对双容水箱这一控制对象已经有了十分深入的研究,国外的很多大学都已经广泛的普及了一种著名的智能双容水箱实验设备,国内也有一些高校引进了双容水箱过程控制实验装置。但由于该系统的价格昂贵,购置成本高,仅仅有少数实验室才能利用研究,这严重制约了国内对双容水箱液位控制系统的研究,制约了我们对基于双容水箱系统算法及其仿真的研究。
国外的液位控制系统发展十分迅猛,实验平台和实验环境比国内好很多,智能化也已经应用到液位控制系统当中了,有一些已经达到了商品化的程度,在这些方面我们国内的发展水平还有着明显的差距。
1.2.2国内研究现状
国内目前也有很多厂家做了类似的双容水箱实验系统,如天煌教仪THBSY型双容水箱液位控制系统,一些研究室也有自制的双容水箱控制系统。有了这些实验装置的存在,为国内广大师生提供了教学平台,也可以让学生对自动控制原理等课程进行深入理解,并在实践中学习相关原理。
在国内的产品中 ,PID算法对控制对象进行控制的前提是搞清楚控制系统所对应的数学模型。对于一些具有线性、时不变等的控制对象,PID控制便可以完美的胜任。然而,对于一些复杂的控制系统,其数学模型往往不好建立,这就需要我们对数学模型进行简化或近似化,但是所得到的数学模型不能完美的反映系统的实际的特性。
1.3控制理论发展历程
控制理论的发展,主要源于“反馈”思想的发展。
控制理论的发展可以追溯到公元前3世纪中叶,古希腊就出现了利用浮子调节的计时水钟,这种调节作用就包含了反馈的思想。我国古代也出现了一些具有反馈思想的控制装置,如张衡发明的漏水转浑天仪、苏颂等制作的水运仪象台等。[4]
18世纪的左右,人们对工业生产中的动力的需求越来越大,各种动力装置成为了当时人们研究开发的重点所在,这个时期出现了许多具有反馈作用的各种自动调节动力的装置。其中最出名的当属瓦特发明的蒸汽机节流飞球调节器,并且使蒸汽机得到了广泛的应用,推进了第一次工业革命进程。[18]
控制理论经过了将近200的发展,极大的推进了人类社会的进步。目前,控制理论已经从经典控制理论向智能控制理论方向转变,与其他学科的交叉也使得控制理论得到了迅猛的发展。在现代控制理论出现之后,状态空间法也随之出现。上世纪70年代以来,工业自动化规模进一步扩大和控制要求的进一步提高,大规模工业生产过程中普遍存在滞后严重、多变量耦合、时变和非线性等问题,状态空间法无法发挥其应有的作用,于是,智能控制、自适应控制、鲁棒控制、非线性系统控制、预测控制等新的控制理论应运而生。
纵观控制理论的发展历程可以看到,其形成过程与发展情况与当时的社会生产力的发展关系密切。在社会生产力相对较低的时候,人们注重提高生产效率。而随着社会生产力的大力发展及大规模的工业自动化的出现,人们在生产中更加关注最优化的问题。现代控制理论的发展一定程度上也揭示了社会生产力的发展。
第2章 水箱液位系统设计
2.1 双容水箱模型建立
数学模型在实际中作为一种模拟,运用数学符号、程序、表达式等途径来描绘实际对象,模型的建立过程实质上是将实际对象被数学化的过程。而且其中的实际现象不仅包括类似于重力现象等的物理现象,而且还包括抽象的价值评估等。数学模型可以对实际对象的描述包括其内在规律、规则的解释,而且包括对未来变化的预测,且通过对未来现象的实际控制情况来寻找最优的解决策略。然而,数学模型的建立不仅是将实际现象的复现,还需要对具体问题的具体观察与分析,找出其内在的规律与联系并结合相关的数学知识才可以提炼出来。数学建模主要用到了各种数学公式与法则,所以需要具备一定的抽象思维,将现实生活中的难题进行简化。建模的方法主要有机理法与测试法。
机理法是在对系统的运行机理有了一定了解,且熟知其中的物理、化学变化后,利用相关公式(如能量守恒、动量守恒、物料平衡、动力学原理等)建立数学表达式,同时也需要使用其他辅助关系的公式代入方程,建立方程组。只有对实际现象非常了解,才能够建立正确的数学模型。数学模型主要是要揭示事物间内在的规律,需要了解其内部的运行特点,在实际建模过程中,机理法是非常常用的方法。
测试法是在工业生产中对输入的数据和输出的数据进行某种数学处理后得到相应的数学模型。其特点是不需要深入系统内部,但并非毫无意义,一般是把被研究的对象当做黑箱,然后通过输入不同的测试信号,分析输出信号,进而转化为描述对象特性的解析表达式,估算出被测对象的数学模型。这种方法通常用于对复杂对象的研究。
同时利用机理法与测试法进行建模,也称为“灰箱建模”。
由于水箱的各组成部分的参数易知,水箱的运行过程可以分析出来,相关的物理公式也比较了解,故采用机理法对水箱进行建模,结果也足够直观。
2.2 数学模型求解
建立双容水箱数学模型前,要充分掌握对象的各组成结构特点,这样才可以建立起正确的数学模型。
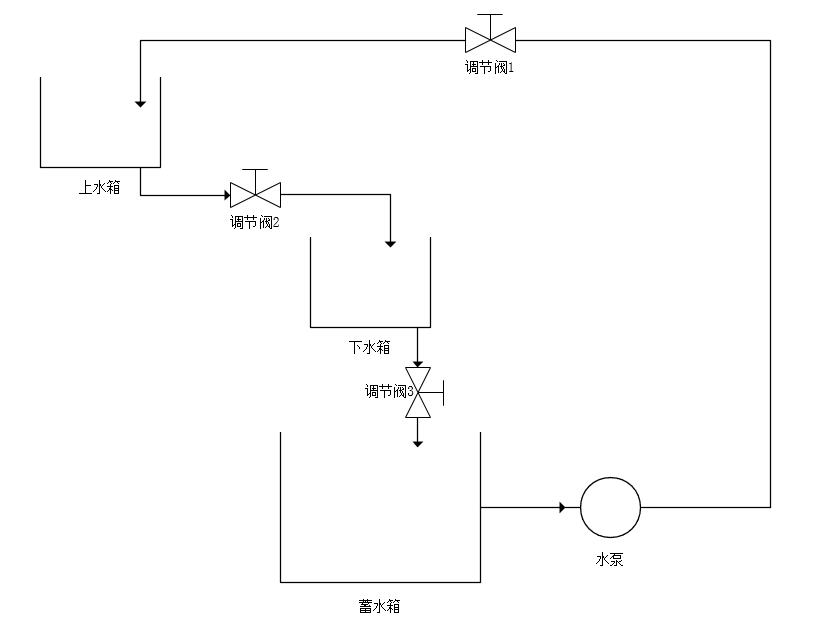 双容水箱系统主要由上水箱、下水箱、调节阀、水泵、蓄水池、液位传感器等构成[5],其基本组成如图2.1所示。
双容水箱系统主要由上水箱、下水箱、调节阀、水泵、蓄水池、液位传感器等构成[5],其基本组成如图2.1所示。
图2.1 水箱模型基本结构图
本次设计采用的水箱、蓄水池均由直径为30cm的水桶代替。
由图2.1可知,上、下水箱是串联在一起的,二者的液位高度不一定相同。水通过水泵从蓄水箱中抽出,先输入上水箱,再输入下水箱,最后又回到蓄水池。其中,阀1控制流速,阀2控制流速,上水箱的横截面积为,下水箱横截面积为,将下水箱液位作为被控参数。
由水箱的物料平衡知,对于上水箱,可列其平衡关系式:[7]
下水箱的平衡关系式有
将(2-1),(2-2)两式相加,可得:
我们近似认为、流速不变时,液位高度与流出量的关系为:
在(2-4),(2-5)中,作为阀2、阀3的阻力系数。通过对局部常用阻力系数表的查询,可知,。
将(2-4),(2-5)带入(2-2)中,并求积分,有
再将(2-5),(2-6)带入(2-3)中。可得:
令,,,有
对(2-8)进行拉氏变换,得:
可以得到系统的传递函数为:
双容水箱是一个经典的二阶控制系统,过程的传递函数相当于两个容器分别独立时的传递函数相乘[13],其中,K是系统增益,、为上、下水箱的时间常数。
本次水箱半径为15cm,可知,上、下水箱的横截面积为:
查阅局部常用阻力系数表知
,
故有:
将(2-14),(2-15),(2-16)带入(2-10)中得到系统的传递函数:
2.3水箱液位模型系统方案设计
2.3.1总体方案设计
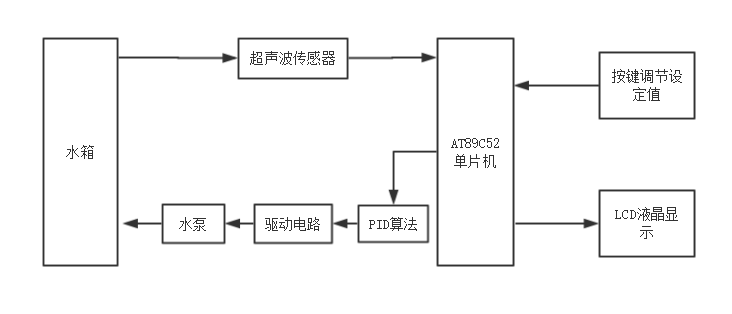 水箱液位控制系统由被控对象水箱、传感器、主控制器、副控制器、水泵及其驱动电路、单片机等组成。相应的功能如图2.2所示。
水箱液位控制系统由被控对象水箱、传感器、主控制器、副控制器、水泵及其驱动电路、单片机等组成。相应的功能如图2.2所示。
图2.2系统总体功能图
2.3.2控制方案设计
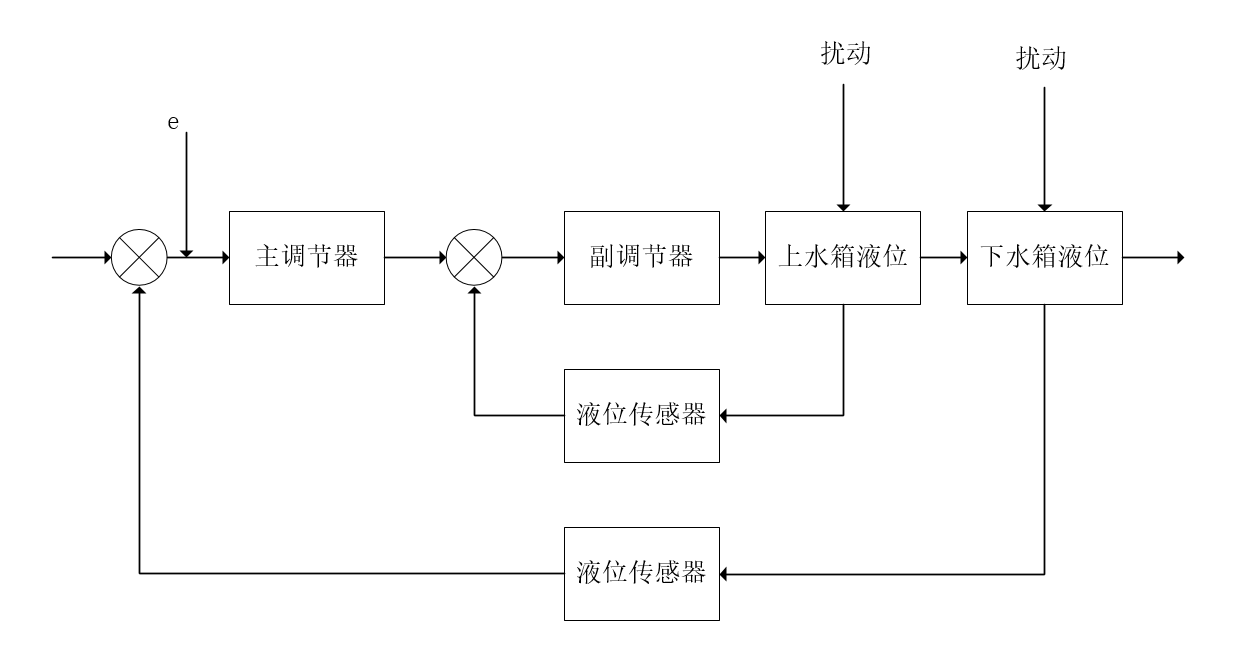 系统的控制流程图如图2.3所示
系统的控制流程图如图2.3所示
图2.3液位串级控制系统框图
传感器检测到水箱液位高度的变化,超声波传感器检测到液面发生了变化,反馈给单片机一个与射程成正比的电平信号。将信号处理后送入单片机中,控制器调节水泵,从而实现对液位的修正。
要使双容水箱液位控制系统稳定运行,则需要完善的控制算法,而在当今的控制算法中,PID算法已经十分成熟,且具有强大的生命力。
2.3.3系统技术指标与设计要求
为了检验系统的控制效果,需要制定一定的性能指标,系统通过比较液位的实际值与设定值来决定水泵的具抽水情况,从而实现对液位高度的控制,系统的主要性能指标有:
- 水箱液位的稳态误差
- 液位稳定的响应时间
2.4 PID控制算法
2.4.1 PID控制算法简介
PID控制器(比例-积分-微分控制器)是一个在工业控制应用中常见的反馈回路部件,由比例单元P、积分单元I和微分单元D组成。在自动控制发展过程中,PID技术具有悠久的历史。PID控制器已经出现了80多年的历史了,但是其仍有着强大的生命力。尽管新的控制器的发明不断的涌现,但是都难在实际工程应用领域和PID控制器相抗衡。
PID控制器实在1900~1940年间被逐渐发明的。1907年,美国C.J.Taglliabue公司发明了比例温度控制器。1929年,Leedsamp;Northrup公司生产了电子机械式PI控制器。1939年,Taylor仪器公司发明一台具有微分作用的控制器,这是一种完整的PID控制器。这就是PID控制器的发明过程[2]。
著名学者Astorm曾指出:“在过程控制应用领域,95%的控制器是PID类型的控制器” [13] 。这表明了PID控制器在过程控制中的统治地位。另一方面,PID控制器的参数整定决定了PID控制系统的控制品质优劣。
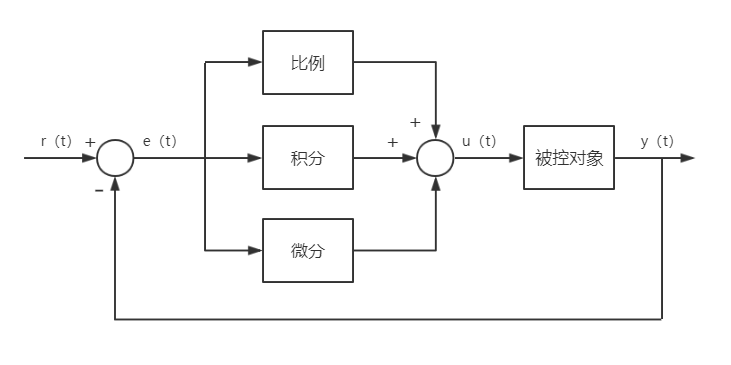 常规的PID控制系统的原理图如图2.4所示。这是一种十分典型的单位负反馈控制系统,由控制器及被控对象组成。
常规的PID控制系统的原理图如图2.4所示。这是一种十分典型的单位负反馈控制系统,由控制器及被控对象组成。
图2.4 PID控制系统原理图
2.4.2 PID控制算法公式
PID控制器是一种线性控制器,它的输入值是偏差信号,即设定值与实际测得值构成的控制偏差。
PID的基本控制规律为:
其中为比例系数,为积分时间常数,为微分时间常数。
也可以表示为:
其中为比例系数,为积分系数,为微分系数。三系数均可调整。
当时,微分项不起作用,则为比例积分控制;当时,积分项不起作用,则为比例微分控制;当、时,积分项和微分项都不起作用,则为比例控制。
2.4.3 PID各环节的调节
PID控制的基础是比例控制,比例控制可以加快系统的响应速度,缩短响应时间;积分控制可以消除稳态误差,但有可能增加超调量;微分控制可加快大惯性系统响应速度以及减弱超调趋势。
(1)比例环节
比例调节环节按照比例反应系统的偏差,来提高系统的调节精度。当系统出现偏差时,比例调节会立即产生调节作用来减少偏差。使被控量朝着减小误差的方向变化,比例作用大,可以加快调节,减少偏差,加快系统的响应速度。但是过大的比例调节,使系统的稳定性下降,易产生超调,甚至造成系统的不稳定。
(2)积分环节
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: