固体波动陀螺半球谐振子的机械品质因数测量毕业论文
2020-02-19 19:02:35
摘 要
固体波动陀螺拥有优异的惯性导航能力,至开发研究出可用于实际导航中以后,凭借其长寿命、高精度、高可靠性等的优点,一直在航空航天、洲际导弹等领域倍受青睐。
半球谐振子在固体波动陀螺仪的工作中有着十分重要的地位,其机械品质因数更是能决定整个固体波动陀螺的工作性能与使用寿命。虽然自从使用熔融石英做其制作材料后,半球谐振子的机械品质因数有着大幅度的提高,达到了惊人的26E6。现如今拖累固体波动陀螺性能的也多是其激励罩和拾振基座,国内外也有许多关于激励和拾振误差分析、改良的研究,但对谐振子机械品质因数的研究是基础,是永远不会过时的根本,而且国内相关的研究发表出来,可查询到的相关研究也不多,所以本文从介绍固体波动陀螺的发展历程开始,到研究机械品质因数的物理意义,建立了一个相对完整的测量半球谐振子机械品质因数的系统。
文利用激光测振仪搭配正弦激励搭建测量系统,得到测量的谐振子振动波形后,利用MATLAB软件对实验数据进行处理。在激励半球谐振子和拾取谐振子振动过程中都是非接触式,不会对半球谐振子的机械品质因数产生干扰,是一种较为严谨的测量方法。
关键词:半球谐振子;机械品质因数;振动测量系统
Abstract
Solid Wave Gyroscope (SWG) has excellent inertial navigation capability. Since its development and research, which can be used in practical navigation, with its advantages of long life, high precision and high reliability, it has been widely used in aerospace, intercontinental missile and other fields.
Hemispherical harmonic oscillator plays an important role in the work of solid wave gyroscope, and its mechanical quality factor can determine the working performance and service life of the whole solid wave gyroscope. Although the mechanical quality factor of hemispheric harmonic oscillator has been greatly improved since fused quartz was used as its material, reaching an astonishing 26E6. Nowadays, the performance of solid wave gyroscope is mostly affected by its excitation cover and vibration pick-up base. There are also many studies on the error analysis and improvement of excitation and vibration pick-up at home and abroad. But the research on the mechanical quality factor of harmonic oscillator is the foundation and will never be outdated. Moreover, the related research published in China and the related research available is not much. So this paper introduces the solid state oscillator. From the beginning of the development of Volume Wave Gyroscope (VWG), to the physical meaning of mechanical quality factor, a relatively complete system for measuring mechanical quality factor of hemispheric harmonic oscillator has been established.
In this paper, a measurement system is built by using laser vibrometer and sinusoidal excitation. After the measured harmonic oscillator vibration waveform is obtained, the experimental data are processed by using MATLAB software. In the process of exciting and picking up the vibration of the hemispheric harmonic oscillator, both of them are non-contact, and do not interfere with the mechanical quality factor of the hemispheric harmonic oscillator. It is a more rigorous measurement method.
Key words:hemispheric harmonic oscillator;mechanical quality factor;vibration measurement system
目 录
摘要 I
第1章 绪论 1
1.1 本课题的研究背景和意义 1
1.2 固体波动半球谐振陀螺(HRG)国内外研究发展状况 1
1.2.1 固体波动半球谐振陀螺国外发展研究 1
1.2.2 固体波动半球谐振陀螺国内研究现状 5
1.3 固体波动半球谐振子机械品质因数测量国内研究现状简述 6
1.4 固体波动半球谐振陀螺的优点及现代化应用 6
第2章 固体波动半球谐振陀螺的基本结构和工作原理 7
2.1 固体波动半球谐振陀螺基本结构 7
2.2 固体波动半球谐振陀螺的基本工作原理 7
2.3 本章小结 8
第3章 测量方案的选择与确定 9
3.1 谐振子机械品质因数测量原理的选择 9
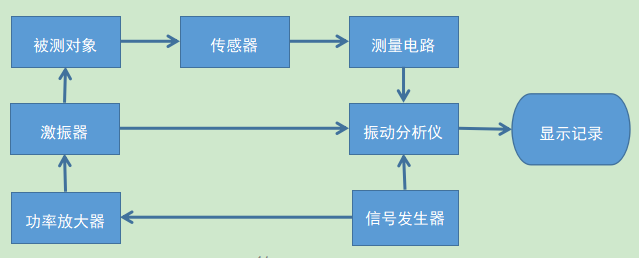
3.2 半球谐振子振动测试系统设计 13
3.3 激励部分 13
3.3.1瞬态激励 13
3.3.2 随机激励 14
3.3.3 稳态正弦激励 15
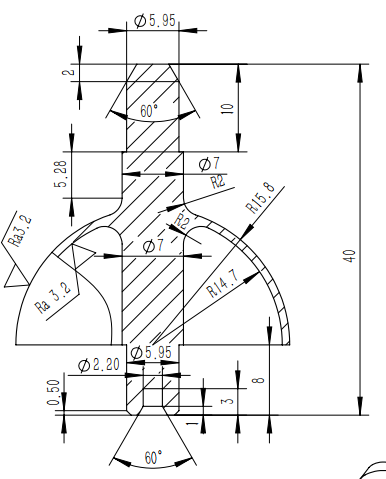
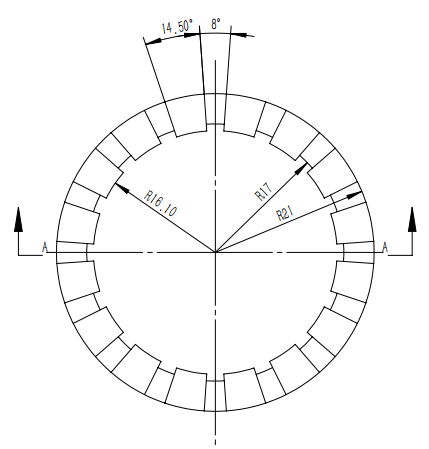
3.4 激振器电极和基座的设计 15
3.5 拾振部分 17
3.6 本章小结 19
第4章 实验部分 20
4.1 所用实验设备的介绍 20
4.1.1 信号发生器和功率放大器 20
4.1.2 激振器和固定基座 21
4.1.3 激光多普勒测振仪和其配套软件硬件 22
4.1.4 三维微动平台 23
4.2 实验过程 24
4.3 本章小结 27
第5章 实验结果处理与分析 28
5.1 实验数据处理 28
5.2 Q值的计算 29
5.3 实验结果处理和分析 32
5.4 本章小结 33
第6章 总结与展望 34
参考文献 35
第1章 绪论
1.1 本课题的研究背景和意义
就像许多我们生活中正在使用或发明创造的工具一般,固体波动陀螺仪发展到现如今遍布航天航空、武器导弹等领域,也同样的经历了由那些善于发现和总结的科学家们先观察自然物理现象,然后得出理论,最后通过或长或短时间的研究者们不断实验、总结和改进,达到了现如今我所处时代的固体波动陀螺仪的辉煌时光。支撑固体波动陀螺发展的理论,由英国物理学家G.H.Bryan在1890年通过观察酒杯在受到敲击时,其在正常情况下和酒杯在转动时所发出的音调不同而得出结论:一个拥有中心轴的弯曲半球形物体,能够察觉到旋转[1]。
固体波动陀螺仪经过长达一百多年的测试、改进与发展,已经证明了其在实际运用中的各种优点,特别是其在使用寿命方面。其低消耗、抗干扰和使用寿命长等优点使它成为人类在宇宙航天器上独一无二的选择[2]。
固体波动陀螺半球谐振子是固体波动半球谐振陀螺正常工作的关键器件,其中机械品质因数Q值是评价半球谐振加工及其工作性能的重要评价参数之一[3]。在国内的许多相关研究工作都是围绕陀螺仪在实际工作中,其信号处理和收集过程中的误差分析和误差补偿和改良等研究方向[4]。而且相对于现如今的陀螺仪已经发展到向着MEMS谐振环陀螺和谐振盘陀螺以及MEMS平面陀螺等方向发展[5],对半球型谐振陀螺的研究已经是不合时宜了。但是所有的技术在发展过程中都在进行革命性的变化,在性能提高或不变的基础上,技术发展向着更易操作、更简便、更小更强的道路上前进,不然就只是华而不实的艺术品。虽然我的研究课题属于基础范畴,但基础的科技研究与重现确是必要且具有深刻的启发和创新启迪意义的。本课题将研究并测量固体波动陀螺半球谐振子的机械品质因数Q值,为从基础上提高半球谐振陀螺仪的精度做一些工作。
1.2 固体波动半球谐振陀螺(HRG)国内外研究发展状况
1.2.1 固体波动半球谐振陀螺国外发展研究
半球谐振陀螺成功的物理学理论基础是科里奥利加速度引起的力,由法国科学家Gaspard-Gustave Coriolis在提出[1],主要用于解释为什么风和洋流在赤道以北倾向于流向这个方向的右侧,而在赤道以南则倾向于流向这个方向的左侧,同时他还在1835年描述了旋转参考框架中物体运动产生的力[6]。在1890年,英国圣彼得堡大学物理学家G.H.Bryan提出了绕行半球可测量物体转动的G.H.Bryan理论,并设想了HRG。
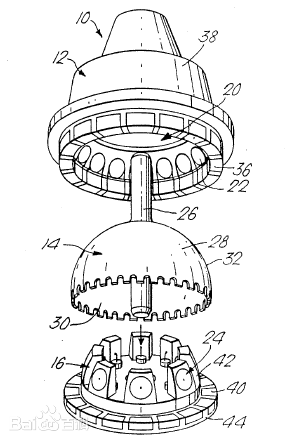
1965年,美国的Delco公司授权David Lynch博士领导的物理小组研究半球谐振陀螺[7],Lynch 博士使用基于 Rayleigh 不伸展壳理论的拉格朗日程序构建了第一个振动半球壳的理论模型[1]。基于这个理论模型,在当时设计了酒杯型(外部杆)和蘑菇型(内部杆)两种陀螺仪谐振器[8],但前者虽然性能不错,但对温度表现出了较高的敏感性,后者更是表现出对环境的严格控制要求[9]。所以,对半球谐振陀螺仪的研究再次被搁置[10]。
 图 1.1 酒杯型和蘑菇型陀螺仪
图 1.1 酒杯型和蘑菇型陀螺仪
1975年Delco在Lynch博士的建议下重启HRG计划[11],得到了NAVAIR的资助。在二十世纪八十年代早期由Tim Hanley带领,使用具有低内部阻尼特性的熔融石英做出了品质因数(Qs)高达1000万以上、性能卓越的HRG,设计出了两种音速陀螺仪,这些设计是具有真正的玻璃谐振器的 Block 10 陀螺仪和具有内部阀杆的蘑菇谐振器的 Block 20 陀螺仪,并在1979年针对其研发的半球谐振陀螺申请专利。Delco和NAVAIR对HRG的支持和研究,对HRG的发展有着划时代的意义[12],也正是他们在HRG上研究的成果,为半球谐振陀螺的成功做出了巨大的贡献。

图 1.2 Block10号和20号音速陀螺仪
在1987年至1990年间,在政府的参与下HRG的发展完善速度很快。不仅半球谐振陀螺的体积为了满足军方要求,设计得更小[13]。同时,谐振器的平衡性也得到了很大的改善。创建了第一个利用激光进行质量消除的谐振器平衡站,使电子器件现代化,改进了关键工艺,并开发了谐振器制造方法,以改善陀螺仪的时间常数即减小损耗。
1991到1992年,是HRG崭露头角的时间。在此期间,它通过在当时首屈一指的德国第一大航空公司汉莎航空公司进行为期一年的飞行测试[14],由Delco公司推出的HRG-Carousel-404系列导航系统证明了自己优越性能、低失误率、高精度和超高的可靠性能[15]。Lynch 博士于 1992 年 10 月在德国举办的一次研讨会上就测试做出了以下声明:“C-404 系统样机最近在汉莎波音 747-400 中完成了一年的测试。在 4000 小时的商业飞行期间,位置精度约为每小时 0.8 海里,以 95% 的概率计算为每小时 1.7 海里。在该试验期间未发生失败。达美航空将成为新系统系列的最初用户。他们已经订购了 30 套 C-411 系统,将取代 L-1011 飞机上现有的 C-IV 系统。Delco 计划在 1993 年第一季度对 C-411 进行认证,并计划在夏季之前全面投产”[16]。
但不幸的是,由于当时第一次海湾战争的突然发生,世界飞机制造业受到了严重的打击。Delco公司收到的额外HRG订单数量远低于预期,所以Delco只能终止其全面生产HRG-C411的计划[17]。这对HRG的发展几乎是致命的打击,但是Delco在圣巴巴拉研究团队,在Anthony Matthews带领下,在让HRG体积减小一半的同时保持优越性能的新工作取得的进展让事情有了转机。Anthony Matthews的团队成功的让谐振器直径减小50%(直径为30 mm)使得体积减小了八倍,且这样的新一代的陀螺仪的性能与体积减小之前的陀螺仪性能是等效的,之后通过改善更是超过了老版陀螺仪的性能[18]。该技术的突破,为HRG在太空应用奠定了基础。
直径为30 mm的谐振器陀螺被命名为HRG 130Y。它的体积更小,且采用了之前的蘑菇型设计。传感器由半球内部的 8 个电极提供,由 32 个外部电极提供强制功能,16 个用于参数驱动(振幅),4 个用于速率驱动,12 个用于正交控制。利用HRG 130Y设计出了具有优异性能的惯性导航系统[19],它轻易的满足了当时卫星通信的任务要求。并于1996年参与了NEAR计划,完成了它的第一次太空任务,紧随其后的商业通信卫星任务和土星CASSNI任务。
1996年,Litton公司为了将自己的公司业务扩张到宇宙航空,它收购了Delco公司,其中包括Goleta设施[3]。收购之后,Litton公司投入了大量的人力、财力对HRG在小型化和太空应用方向进行研究,并开发出了一种适用于石油钻井等恶劣环境下的耐用型HRG 130R(图1.3)。
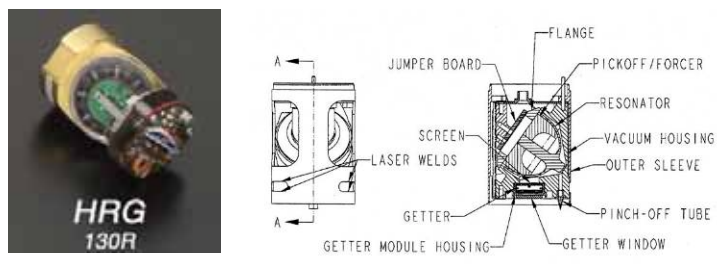
图 1.3 HRG-130R实物及组件
在建造和使用 HRG 130Y 陀螺仪过程中获得的经验使其在 20 世纪 90 年代末进行了一系列概念验证设计,并最终形成了目前的 HRG 130P陀螺仪。陀螺仪完全密封在金属箱中,消除了 HRG 130Y 中存在的氦渗透问题。除了保持氦气之外,被金属外壳包围的空腔形成了一个围绕包含谐振器的主空腔的次级真空空腔。这种配置几乎消除了陀螺仪泄漏的任何风险。
在2000年,Litton公司被诺斯罗普·格鲁曼公司收购[3]。之后诺斯罗普·格鲁曼公司对之前Litton管理下的所有HRG研究部门进行了一系列的重新整合处理,关闭了分散的研究小组,将所有的研究实验室的知识库和生产设备汇合[20]。建造了一个占地超2000平方英尺的洁净室,专门用于研究HRG。诺斯罗普·格鲁曼公司对HRG研究部门的成功合并,和集中管理加大投资,使得诺斯罗普·格鲁曼公司掌握了HRG核心技术,继续研究HRG 130P项目,让该公司一直走在世界前沿。
除美国外,其他国家如俄罗斯、英国、日本、法国等国家也都意识到HRG惯性导航系统的优异性能和广阔发展前景,先后开始研究HRG。其中值得一提的是俄罗斯对固体波动陀螺仪的研究,由俄罗斯作者马特维耶夫编写的《固体波动陀螺》全面介绍了半球谐振陀螺仪的理论原理、物理知识和陀螺仪的数学建模等理论知识[4],形成了一套十分成熟的理论。虽然HRG有很高的可靠性、稳定性,但由于其复杂的三维制造工艺,导致了它大规模生产上的存在许多困难,所以在二十一世纪的HRG发展研究方向大多都是向着MEMS平面化固体波动陀螺发展。高端的MEMS固体波动陀螺不仅体积更小[5],且有质量轻、功耗低、适于批量化生产等优点。
1.2.2 固体波动半球谐振陀螺国内研究现状
国内对HRG的研究始于80年代,于1985年国内出现了第一篇介绍关于HRG的文章,HRG第一次展现在国人的视野中,之后国内的许多研究机构和高校开始研究半球谐振陀螺。但是在1997年国家对HRG进行立项之前,国内对HRG的研究都没有获得太大的进展。之所以如此,很大的影响是来自于Delco公司被收购,导致许多研究者停止了研究工作。自那以后,国内的半球谐振陀螺取得了显著的成果,中电集团26所通过与哈尔滨工业大学空间控制与惯性技术研究中心合作分别于2002年和2003年制造出两批半球谐振陀螺样机。第一批力平衡式样机成功研发,且实验成功能测量角速度。第二批样机与第一批样机对比,其灵敏度提高了两个数量级,具备了角速度陀螺的基本品质。这些样机的成功研发,标志着国内自主研发的半球谐振陀螺的初步成功,已探索出了一条谐振子加工、镀膜和调平、等切实可行的道路。从八十年代发展到现在,中电26所对HRG的相关研究一直代表的国内的最高水平,该所在谐振子加工及平衡、电路的优化设计方面不断改进, 使半球谐振陀螺初步达到导航级工作性能。2015年,由该所承担的国家863项目长寿命高 可靠半球陀螺仪顺利通过验收。
1.3 固体波动半球谐振子机械品质因数测量国内研究现状简述
国内针对半球谐振子Q值的测量研究不多,更多的的是关于半球谐振陀螺在实际工作中性能的研究,以及对半球谐振陀螺的数学建模和误差分析。针对半球谐振陀螺谐振子Q值的研究,属于基础性的研究,但通过测量Q值来改善半球谐振陀螺仪的性能,不仅取决于测量的精确度,更取决于国内的半球谐振子加工技术。国内大多侧重于研究机械陀螺整体结构的品质因数,具体针对谐振子Q值测量以改进加工工艺的研究我只发现文献[18],里面介绍了几种对谐振子Q值的测量方法,然后由测量结果分析了改善谐振子机械品质因数的方法。
1.4 固体波动半球谐振陀螺的优点及现代化应用
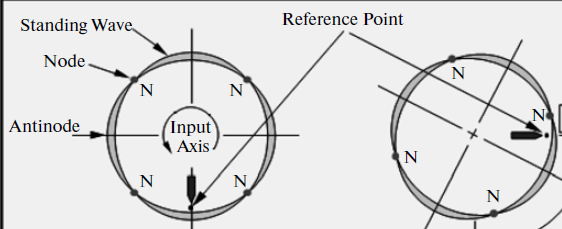
HRG具有十分优秀的环境适应性,是一种使用半球壳唇缘的径向振动驻波进动效应来感测基座旋转的一种哥式振动陀螺[16]。与一般的陀螺相比,它有很多普通陀螺仪无法比拟的优势。例如:
(1)没有机械转子和活动支撑,所以没有机械摩擦和漂移,具有较强的抗冲击能力;
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: