土壤水分估算的可观测性分析外文翻译资料
2021-12-21 22:35:47
土壤水分估算的可观测性分析
摘要
研究土壤里的水分对于研究气候学,地理科学有着极大的意义。最重要的是可以帮助人们根据不同的环境来决定选用何种的灌溉系统,但由于不可能在整个农业农田里大量使用传感器比如湿度传感器来进行一些关键的测量,因此通常很难确定采用何种的传感器来测量这些量。因此,需要估算未测量区域的土壤水分,我们可以使用诸如基于卡尔曼的估计器之类的实验方法来完成对这些量的采集。农业水文模型是用于表示大气,植物和土壤之间水分转移的模型,是高度非线性的。由于系统的“强”而非“弱”可观察性确保了基于卡尔曼的估算器的更好性能,所以可以更好的帮助我们测量土壤里的一些参数,并且也可据此开发更可靠的土壤水分估算算法。
这篇研究是通过用合成数据来分析研究的。选用扩展过后的卡尔曼滤波器(EKF)来作为状态估计量。正如预期的那样,结果表明,在系统“可观测”的情况下,EKF的性能能更好的展现出来。
关键词:可观察性; 状态估计; 扩展卡尔曼滤波器; 农业; 非线性系统;
1.前言
人类生存的基本需求是食物和水,而通过农业生产的食物本身就需要水。由于这些基本需求以及一些其他用水的地方,以至于全球水平的用水增长率已超过20世纪人口增长率的两倍。此外,由于恶劣的气候条件,水资源稀缺已成为一个全球性的问题,不再局限于干旱地区和半干旱地区。由于全球70%的淡水用于农业,并且所有其他农业用水灌溉都是以较低的效率在使用,农业是水资源稀缺性最大的领域。
通常的灌溉措施涉及开放式循环控制,其中并没有考虑到反馈和灌溉。根据农民的观察,灌溉是最容易造成过度或更少灌溉的,会使水资源得不到充分的运用。实施灌溉闭环控制的主要障碍是缺乏土壤水分测量,而土壤水分测量可作为预先控制灌溉的用水量的一个标准。由于农业面积大且多样,在整个农田中放置传感器是不切实际的,因此需要对整个土壤水分剖面进行估计。
根据土壤水分估计器和农业水文模型,可以对未测量区域的土壤水分进行估计测量。土壤湿度对农作物的生长有着非常重要的影响,要选择合适的湿度范围,才能使植物更好的生长。在植物的成长过程中,土壤的湿度起着很重要的作用,并且不同的植物,对土壤的湿度需求是不同的。土壤湿度可以直接影响营养物质的吸收和植物的生长发育,同时还影响土壤中各种养分的有效性。当土壤湿度不适当时,不仅严重影响其正常生长,甚至会导致种植品死亡,造成种植户的严重经济损失。土壤湿度是作物生长发育的基本条件和作物产量预报的重要参数。同时,它也是水文学、气象学等科学研究领域的重要环境因子和过程参数,获取土壤湿度信息以制定人工干预调节措施是稳固生产的重要保证,对于土壤湿度的研究也具有重要意义。随着计算机技术和通讯技术的飞速发展,使得建立节灌溉系统的难度、成本逐渐降低,自动化节水灌溉控制系统在农田灌溉中逐渐到应用。对于这个农业灌溉系统,我们不知道的是不同深度的水分压力,这就要求我们需要了解不同深度土壤基质的含水量。由于农业水文模型的非线性特性,通常采用扩展卡尔曼滤波或隐式卡尔曼滤波等非线性估计方法来进行数据估计。在经过几个月的研究后,我们得到了一些研究数据,包括用合成数据、遥感测量的数据和地面数据来进行土壤水模拟的过滤设计,但这些研究都没有考虑到确保系统的可观测性分析。本文讨论了农业灌溉系统的可观测性分析,探讨了基于系统可观测性的土壤剖面水分含量的重要性。
2.开发状态空间系统
2.1 农业灌溉模型
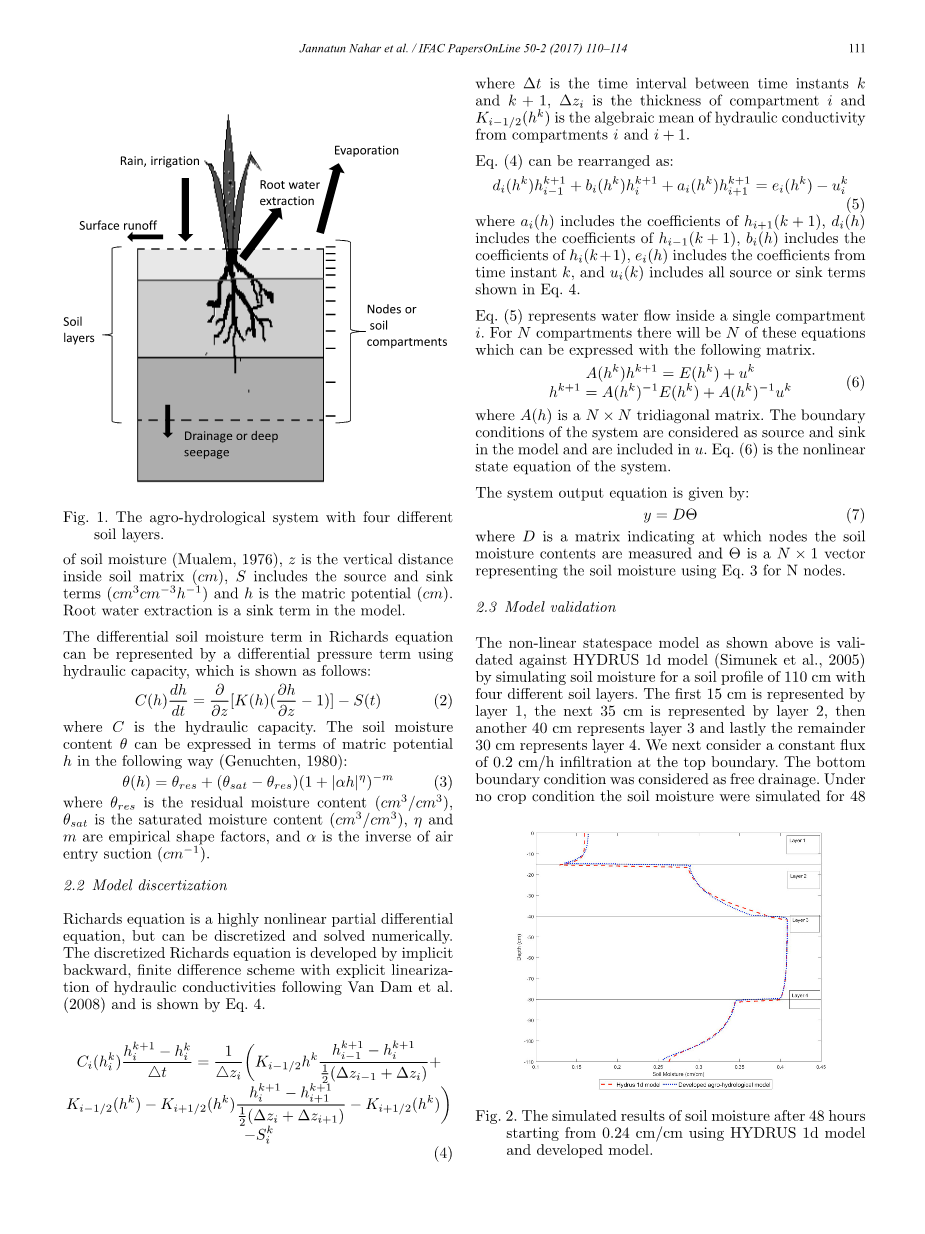
农业灌溉模型主要考虑的是土壤-水矩阵系统。该系统的输入和输出包括如图1所示的降雨、植物的根水提取和排水等参数,可使用Richards方程来表示该农业水文系统的动态参数,方程如下:
其中,theta;表示土壤含水量(cm3/cm3)。k是导水率(cm/h),它本身就是一个函数。z是土壤基质垂直距离(cm),S包括源头和下沉项(cm3cm-3h-1),h是基质势(cm),根部水提取是模型中的下沉项。
图1:农业灌溉系统中影响土壤水分的四个变量
理查兹方程中的土壤水分差分项可用如下方程来表示。
其中C为水力容量,土壤含水量theta;可用基质势表示,表示方式如下:
其中theta;res为残余含水量(cm3/cm3),theta;sat为饱和含水量(cm3/cm3)。eta;和m是经验形状因素,alpha;是入口吸力(cm-1)的倒数。
2.2模型判别
Richards方程是一个高度非线性的偏微分方程,但可以离散化和数值求解。离散化Richards方程由隐式后向有限差分格式发展而成,其水力传导率的显式线性化遵循van dam,如式4所示;
式中Delta;t是时间瞬间k和k 1之间的时间间隔,△Zi 是i和ki-1/2 (hk)的厚度,是隔间i和i 1的水力传导率的代数平均值。
式(4)也可以表示为:
(5)
其中ai(h)包括h i 1(k 1)的系数,di(h)包括系数hi-1(k 1),bi(h)包括hi(k 1)的系数,ei(h)包括系数k和ui(k)包括所有的源头或下沉项。
式(5)表示单个隔间i内的水流。对于n个隔间,这些等式中的n,可用以下矩阵表示。
其中A(h)是Ntimes;N阶矩阵。该模型将系统的边界条件视为源和下陷,并将其包含在U。方程(6)是支持向量机的非线性方程。
系统输出方程由下式得出:
(7)
式中,D是一个矩阵,指示在哪个节点处测量土壤水分含量,theta;是一个Ntimes;1矢量,用公式3表示N个节点的土壤含水量。
2 3模型验证
上面所示的非线性状态空间模型与Hydrus 1d模型相比有效,该模型通过模拟具有四个不同土层的110cm土壤剖面的土壤湿度。前15 cm由层1表示,后35厘米由层2表示,然后另40厘米代表紫菜3,最后剩余30厘米代表紫菜4. 接下来,我们考虑在顶部边界处0.2厘米/小时渗透的恒定通量。将底部边界条件视为无作物条件下的自由排水,模拟土壤湿度为48。
图2
图2 从0.24cm/cm开始48小时后土壤水分模拟结果采用HydrusLD模型和发展模型从0.24 cm/em开始的小时数和最终结果如图2所示。结果表明,所建立模型的结果与iyd)rus 1d模型的结果非常吻合。
3.系统的可观测性
当输入和输出的数据在有限的时间间隔[t0,tf]内足以单独确定初始状态x(to)时,系统就被认为是可观测的。为了确定非线性系统的可观测性,将农业水文系统在不同的运行条件下线性化,然后确定系统的局部可观测性。系统的线性化是用雅可比FK和GK系统实现的,这两个系统是用数值方法得到的,并由以下公式给出:
其中f=A(hk)-1E(hK) A(hk)-1uk ,g=Dtheta;
首先研究系统的可观测性。如果可观测性矩阵OK具有完整的列秩,则认为系统是可观测的,其中可观测性矩阵由下式给出:
由于秩检验没有提供系统强可观测性或弱可观测性的任何信息,因此我们进一步使用火腿提到的确定性方法对可观测系统进行可观测性程度分析。
在这种确定性方法中,“OK”的行向量被化为单位长度向量N,系统可观测性的相对测度由矩阵NTN的最大特征值与最小特征值之比给出。对于高度可观测的系统,由lambda;max/lambda;min表示的比率将是一个或接近一个。由于农业水文系统的时变特性,可观测性分析是在整个时间轨道上进行的。
4 结果
4.1 数据描述
本研究以110cm土壤剖面与四个不同均质土层的合成数据进行。考虑的土壤参数值如表1所示。综合数据是使用加拿大圣阿尔伯特气象站的水文模型和天气数据生成的。据分析,只有四个测量值是可用的深度:5 cm、20 cm、50 cm和100 cm。每小时收集一次测量数据。表1。用于模拟系统的参数值。
表1 土壤参数值
4.2 观测性分析
为了对该系统进行状态估计,需要对其进行离散化,使系统保持不可观测状态。在本研究中,将土壤剖面离散为44,333,31,23和15个节点,以创建具有44个节点的系统。33. 31,23和15个州。在44个州都是这样。O的秩在时间轨迹的任意部分都不是满的,因此系统是不可观测的。有33个州和31个州的案例在某些时候是不可观察的,因此它们部分可观察,如图(3)所示。但是,如果状态数减少到23个状态,系统就可以通过等级测试观察到。在图中, 15个状态和23个状态是可观测的,但为了更好地理解系统,我们根据可观测程度进行了进一步的分析。
图3。不同状态系统可观测性矩阵的秩
图(4)显示了观测程度的结果。结果表明,当我们减少状态数时,lambda;max/lambda;min开始减少,这意味着系统变得更加可观测。虽然系统基于秩检验,在23种状态和15种状态下,特征值分析表明,15种状态的系统相对于23种状态的系统更具可观测性。从可观测性分析的程度来看,具有部分可观测状态的33和31个状态的系统表现非常明显。我们可以看出在更少的状态下可以保证更好的观测能力,但同时减少状态的数量会在方程4的数值解中产生问题。
我们观察到更少的状态可以保证更好的观测能力,但同时减少状态的数量会在方程4的数值解中产生问题。在这项工作中,由于这个原因,系统没有减少到15个州以下。
在秩检验(图3)和相对可观测性分析(图4)中,大多数不可观测性发生在模拟的第一部分。尽管23和15个状态的系统在整个时间轨迹上都是可以观察到的,如图3所示,但是由于lambda;max/lambda;min值较高,相对可观察性最初不如图4所示。这种行为的一个可能原因是,这些作业区域的极端干燥或湿润土壤条件持续存在。如表1所示,该土壤的饱和土壤湿度设置在0.43和0.45之间,系统的初始土壤湿度考虑在0.35和0.4之间。考虑到这些数值并不是指极端潮湿的条件,而是相对接近这些极端地区。在近饱和区对系统进行线性化可能会引入一些建模误差。
图4 33态、31态、23态和15态系统在不同时间的最大和最小特征值之比
4.3 EKK的性能
为了研究基于可观测性的EKF性能,对部分可观测的31态系统和完全可观测的15态系统进行了比较分析。使用相同的合成数据,但数据中添加了少量的噪声。噪声是使用matlab里的函数 #39;randn#39;产生的,只有1%的噪声与测量值相加。过程噪声协方差QK为1e5I,测量噪声协方差为0.5I,其中I为状态维数的单位矩阵。因为我们想比较EKF的表现,从四次测量中,只有三次被选为比较数据。它们是从5厘米、50厘米和100厘米的深度测量的。EKF估算了20cm深的土壤湿度,并与实际数据进行了比较。从图5中可以清楚地看到,具有15个状态的EKE输出的系统的性能优于具有31个状态的系统。在估计节点,即深度20cm,15

英语原文共 5 页
资料编号:[3991]



