光伏跟踪控制器设计毕业论文
2020-04-07 08:45:21
摘 要
本文章的主要目的为基于单片机设计开发以实现太阳能光伏发电板的最大功率点的双轴自动跟踪器。当在没有光伏自动跟踪的情况之下,太阳能光伏发电板采集太阳能能源的效率就会变得很低。而通过人工改变太阳能光伏发电板的做法会消耗大量人力。因此需要设计一款光伏自动跟踪器来实现太阳能光伏发电板对太阳自动的跟踪。文章基于stm32系列单片机,通过采集比较四个不同位置处光敏电阻的电压,来确定电机的转向,实现对光伏的自动跟踪,并设计了相关信息的实时储存传递系统。此光伏跟踪控制器能保持太阳能光伏发电板与太阳光线垂直,极大提高太阳能光伏能量的利用效率,在国家大力提倡发展清洁能源的背景下,具有一定的意义。
关键词:自动跟踪,光伏,双轴。
Abstract
The main purpose of this paper is to design and develop a biaxial automatic tracking device for the maximum power points of solar photovoltaic panels based on single-chip microcomputer design and development. Solar photovoltaic panels will be less efficient at collecting solar energy when there is no photovoltaic tracking. Changing solar photovoltaic panels by hand would consume a lot of manpower. Therefore, it is necessary to design a photovoltaic automatic tracking device to realize automatic tracking of solar photovoltaic panels. Based on stm32 series microcontroller, through collecting compare four different location of photosensitive resistance voltage, to determine the steering motor, realize the automatic tracking of photovoltaic (pv), and design the real-time storage of the information transmission system. The pv tracking controller can keep solar photovoltaic panels with the sun's rays vertically, greatly enhance the utilization efficiency of solar photovoltaic energy, under the background of national advocate vigorously to develop clean energy, has a certain significance.
Key Words:Automatic tracking, pv, biaxial.
目 录
第1章 绪论 1
1.1研究背景及意义 1
1.2光伏发电特点 1
1.3国内及国外研究情况 2
1.4课题研究内容及预期目标 2
第2章 基本内容与技术方案 3
2.1设计内容 3
2.2方案比较与选择 3
2.2.1光伏跟踪类型选择 3
2.2.2跟踪方式的选择 4
2.2.3机械执行部分的选择 4
2.3设计方案 6
第3章 机械部分设计 7
3.1角度调节机构设计 7
3.2各器件的选择 7
3.2.1光伏发电板 7
3.2.2步进电机 8
3.2.3电动升缩杆 8
3.3 传动齿轮设计 9
3.4光伏发电板支架设计 10
3.5强度校核 11
3.5.1轴向应力校核 11
3.5.2弯曲应力校核 12
第4章 硬件电路设计 13
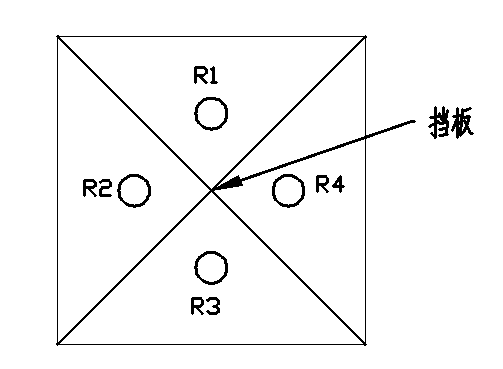
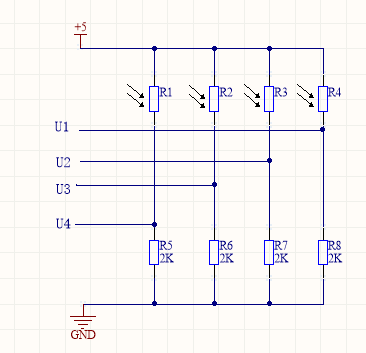
4.1太阳光角度检测传感器电路设计 13
4.1.1光电传感器的选用 13
4.1.2设计原理 14
4.1.3电路设计 14
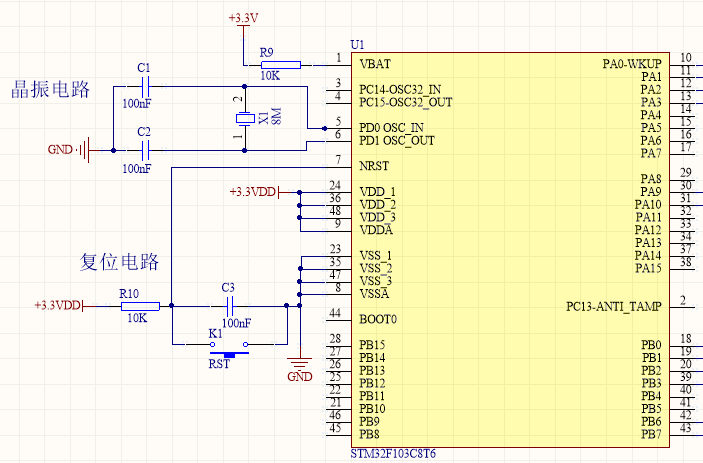
4.2 STM32的最小系统 15
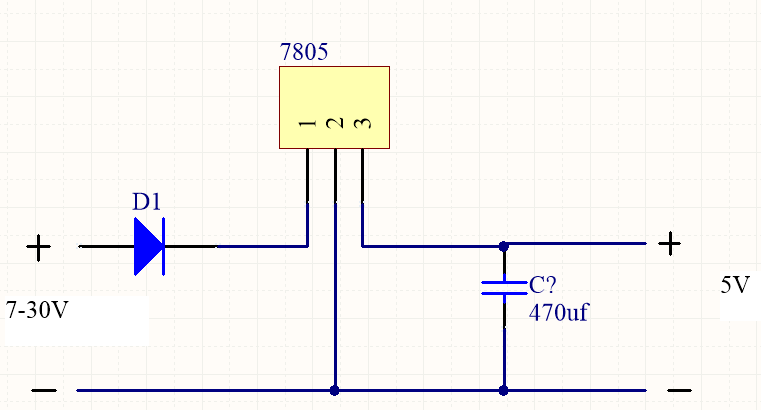
4.3光伏发电板的稳压电路 16
4.4 电机驱动电路 17
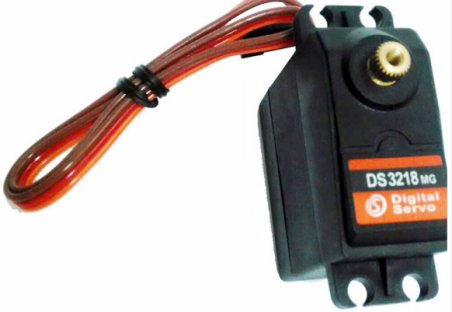
4.4.1 舵机选用原因 17
4.4.2 舵机的选择 17
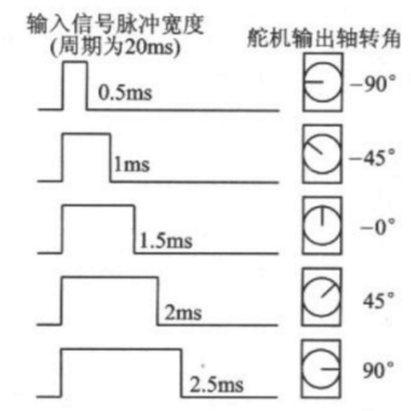
4.4.3 ds3218型舵机介绍及工作原理 18
4.4.4 驱动电路的设计 19
第5章 软件设计 20
5.1下位机软件设计 20
5.1.1光电跟踪功能实现 20
5.1.2 时间跟踪功能实现 21
5.2 上位机设计 23
5.2.1 前面板设计 24
5.2.2程序框图设计 24
第6章 实物演示 27
第7章 结论 29
参考文献 30
附录A 程序清单 31
致谢 41
第1章 绪论
1.1研究背景及意义
在近代历史中,人类发明了蒸汽机等需要能源驱动的机械,大大解放了人类生产力。但与此同时,人类也消耗了地球上的大量能源。据能源机构估计,按照现在煤的消耗速度,地球上已探明的煤资源将会在三百年内耗尽。石油应用的情况更加不乐观,按照目前石油的应用实际情况,人们探明的所存在的石油资源会在未来几十年完全耗尽。且当代社会生活关于能源的需要不断增加,如果人类仅仅依靠化石能源作为唯一的能量来源。那么当化石能源耗尽时,人们将会面对能源短缺的巨大问题,将阻碍人类社会正常运作。
多年来我国以石化能源为主要能源的来源,而化石燃料会在利用的时因为燃烧产生各种各样的有害气体造成环境污染。同时化石燃料的消耗会造成全球气候变化。燃料中所含的碳转变为二氧化碳然后进入大气,使空中的二氧化碳的所占比例慢慢增加,进而会产生温室效应。这将会改变地区的气候情况,危害正常的生态秩序。化石能源中煤炭含有相当多的硫元素,因此煤炭燃烧时会产生大量的氧化硫物质,这会使雨水的PH值降低,形成所谓的“酸雨”,酸雨会使土壤酸化,影响作物的正常生长。且会腐蚀建筑物,给人带来安全隐患。这要求我国应转变能源的使用结构,大力推动清洁能源运用。
现在国家正大力支持清洁能源产业,投入很多在光伏发电研究上。光伏发电不会排放污染物质,不会造成温室效应。因此,设计光伏跟踪控制器有利于促进清洁能源的发展,对环境保护具有较大意义。太阳能产业现在越来越受重视,光伏跟踪控制器具有很好的市场前景。
1.2光伏发电特点
太阳能作为清洁能源之中重要的一种,相比较于化石能源具有很多突出优点:太阳能的采用不会产生任何污染,采集过程没有噪音;太阳光照覆盖广,几乎没有地域的限制;可以通过太阳能光伏发电板直接开发和利用,采集较方便,并且无运输成本;每年太阳辐射到地球的能量巨大,远大于人类日常生活所需求的能量;太阳燃料耗尽所需时间远大于地球的寿命,因此太阳能能源是可持续的。
但同时,当今仍存在一些突出问题阻碍光伏发电技术的发展。首先是光电转换的效率太低。现在光伏发电板大多方位固定,不能随着太阳位置变动而变动。同时太阳能发电受到天气影响较大,在阴天时发电量极低,若遇到连续阴雨天气可能无法满足供电需求。光伏发电板的成本也较高,很难在短时间收回光伏发电系统的成本。这进一步制约了光伏发电产业的发展。
1.3国内及国外研究情况
在当今世界,太阳能光伏发电产业发展迅速。在1990年德国曾推出“一千屋顶计划”,现已完成上万套位于屋顶太阳能设备。美国则制定“阳光计划”,大量增加了太阳能发电方面财政投入,投资多晶硅材料的研发,以此用来提高光伏发电板光电转化效率。法国同时在2006年通过“太阳神”太阳能的利用计划。我国在太阳能利用方面也十分重视,现在已建成的较大太阳能电站有西藏双湖25千瓦光伏发电站,西藏安多100千瓦光伏电站,新疆北塔山牧场150千瓦太阳能光伏电站等[1]。我国也正在积极研发光伏跟踪技术,以提高太阳能利用率。但我国太阳能产业与国外相比还是存在一定的差距。要提高光电转换效率,必须要提炼高纯度的硅,而我国提炼硅的技术暂时还不够不成熟,部分高光电转换的光伏板还需从国外购买。
1.4课题研究内容及预期目标
在目前,太阳能利用率低是阻碍太阳能行业发展的一个重大问题,传统的太阳能设备的太阳能电池板固定在一定的的方向,不能够随着太阳位置而改变太阳能电池板的方向,这势必会大大降低太阳能的利用率。现在市面上虽然已经有一些光伏跟踪装置,但这些光伏跟踪器都价格昂贵,且缺乏配套的上位机控制端,很阻碍太阳能行业发展。以至于现在大多地区的光伏发电板没有采取自动跟踪方式,这会降低光电转换效率,在满足相同发电量的同时会浪费多余的场地和器材。因此,本次设计目的为设计一个光伏跟踪控制器和上位机控制端,使光伏跟踪器能自动跟踪太阳所在位置,控制端能进行数据处理并实时存储相应数据。在提高光电转换效率的同时,尽可能降低整个光伏发电系统所需求的费用。
第2章 基本内容与技术方案
2.1设计内容
本次设计的内容为设计一个光伏跟踪控制器。要求能通过采集光照强度、光线位移变化等参数,分析得出太阳能电池板的最佳倾角,实现太阳能电池板的转动。选择合适的元器件,实现光电跟踪、时间跟踪,确定最佳倾角工作模式。实现数据实时采集、实时处理,并能自动存储相关数据。实现全天候工作模式,实现远程数据传输,远程人工干预。
2.2方案比较与选择
2.2.1光伏跟踪类型选择
光伏追踪基本上分为单轴跟踪和双轴跟踪。
单轴跟踪方式可以通过调节方位角或者通过调节俯仰角来跟踪日光。单轴的光伏跟踪器只有一个执行器,所以比双轴光伏跟踪控制器跟容易实现控制。成本也相对双轴控制器低,也更容易编程来实现对于光伏的跟踪。
双轴跟踪方式可以通过同时调节方位角和俯仰角来跟踪日光。双轴光伏跟踪器相对于单轴光伏跟踪器来说机械结构更加复杂,同时意味着所需成本也更高。但跟踪精度明显高于单轴光伏跟踪器,光电转换效率更高。
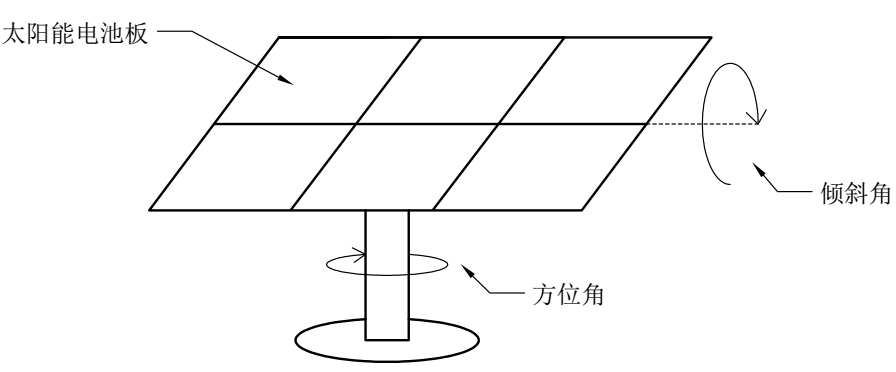
图2.1 方位角及倾斜角图示
单轴太阳能跟踪器,成本较低,但太阳利用率较低,需要不断进行手动调节来实现太阳能利用率的最大化。双轴跟踪器结构复杂,成本相对较高,但太阳能利用率高于单轴跟踪器,且无需人力去进行手动调节另一角度。相比之下,双轴跟踪器更符合设计要求,因此此次设计采用双轴光伏跟踪器。
2.2.2跟踪方式的选择
跟踪方式可分为光电跟踪及时间跟踪。
光电跟踪是闭环控制方法。通过比较不同位置的光传感器的光照强度情况,来产生一个误差信号。通过不断调整光伏跟踪器的方向从而实现对于反馈环的控制,直到将误差信号最小化,闭环控制方法有一个缺点是在阴天时它不能有效地自动跟踪太阳,没有一个鲁棒的算法,只有少数的研究人员会使用图像传感器及图像处理软件用来克服在阴天的光伏跟踪问题[2]。
时间跟踪是开环控制方法。通过确定光伏发电板所处位置的经度纬度,和太阳的运动规律结合起来进行计算,从而确定光伏发电板的运动规律。这种方案不需要用到光照强度传感器来采集光强信息,因此在阴天的情况下,也能够通过跟踪[3]。而且编程简单,成本较低。但是,时间跟踪需要在日出时调整回到初始位置,且日出时间会随着季节不断改变,这就需要频繁地改变光伏发电板的初始位置。由于是开环系统,时间跟踪方式也不可能实现对产生的误差进行自动更正。这就大大影响了光伏发电板跟踪的可靠性。
通过比较,决定采用光电跟踪与时间跟踪结合的方法。因为光伏发电板转换的电能绝大多数产生于晴天,所以在日常情况下采用光电跟踪方式。在阴天情况下可以通过远程人工干预来改变光电跟踪方式为时间跟踪方式。这样可以实现对太阳跟踪的最大精确度。
2.2.3机械执行部分的选择
根据光伏发电板的转动情况,机械执行部分可选择直流电动机,步进电机,及电动升缩杆。
直流动电机是常见的将电能转化机械能的装置。直流电机只要在正负极加上合适的电压就会进行转动。但转动的速度较快,角度难以控制,即使设计多级减速齿轮,仍然难以精确控制角度。因此不适用于控制光伏发电板的方位角和俯仰角。

图2.2 直流电动机
步进电机需要给完整的信号才能步进一定的角度。步进的角度精度较高,两相混合式的步进电机所产生的步距角一般为3.6°、 1.8°,五相混合式的步进电机所产生的步距角为0.72 °、0.36°,这已经能够保证光伏发电板的角度精度。也有一些高性能的步进电机步距角更小。这样就可以保证光伏跟踪的精度。

图2.3 步进电机
电动升缩杆的推力较大,可以由电机带动杆进行直线线升缩。能够运用于各种简单或者复杂工艺流程中作为执行机械来使用,以实现集中控制或者自动控制。一般电动升缩杆所能达到的精度可达0.1mm,精度同样很高,能作用于光伏发电板来控制其俯仰角。

图2.4 电动升缩杆
通过综合比较,步进电机和升缩杆的精度较高,更适合用于光伏跟踪控制器的机械执行部分。由于步进电机可实现360度转动,决定采用步进电机来控制光伏发电板的方位角。而太阳能光伏发电板的俯仰角变化范围小于90度,且控制光伏发电板的俯仰角需要让机械执行机构承受一定压力。所以采用升缩杆来控制光伏发电板的俯仰角。
2.3设计方案
通过上面的方案选择,确定了此次的设计方案。本次的设计方案是以基于单片机系统作为核心的系统的设计,主要是由单片机系统,光电传感器,驱动电机,通讯部分组成。系统设计原理图如下:
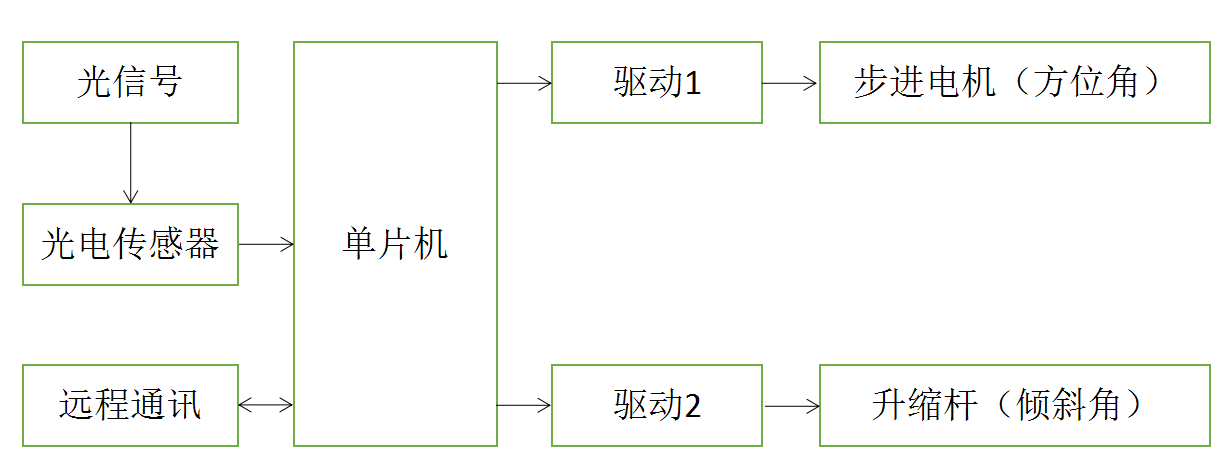
图2.5 光伏跟踪控制系统设计原理图
将光伏跟踪控制器放置在太阳光下,太阳所产生的光信号由光电传感器采集并转化为电信号传入单片机,经过由单片机分析处理后驱动步进电机来控制光伏发电板的方位角,驱动升缩杆来控制光伏发电板的倾斜角,直到光伏发电板上各处光照强度差值在一定范围内时候停止驱动。单片机处理后的数据由通讯部分传入计算机,并实时储存相应的数据。计算机也可以由通讯发出指令来控制光伏跟踪控制器的工作方式,以实现人工干预。
第3章 机械部分设计
3.1角度调节机构设计
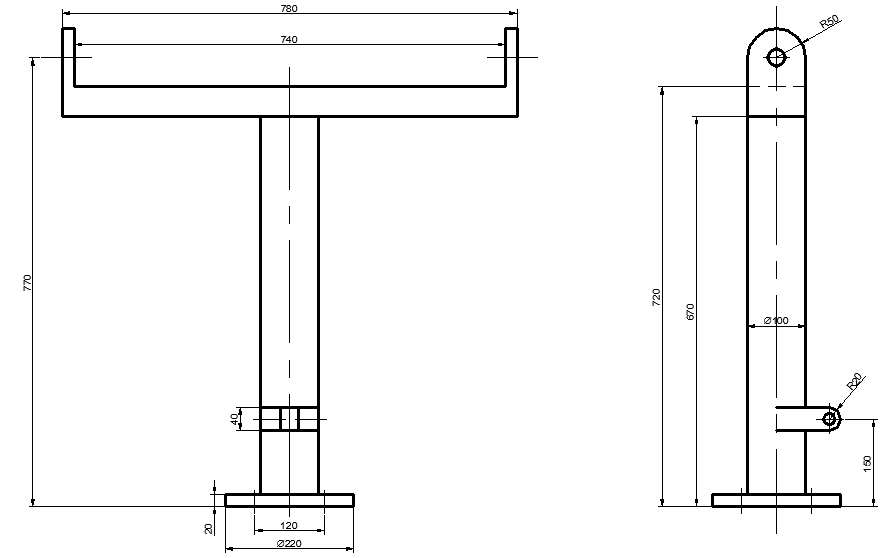
由于太阳位置会随着时间而变化,要实现光伏发电板精准跟踪日光,需不断调节方位角和俯仰角,以保持光伏发电板与日光垂直[4]。于是需要设计角度调节机构。
步进电机与控制方位角的中心杆之间通过齿轮传动,齿轮传动比设计为1:1。这样步进电机的传动角度的精度及为方位角的精度。通过电动升缩杆来控制俯仰角,从而达到角度调节的目的。设计的角度调节机构示意图如图3.1所示。
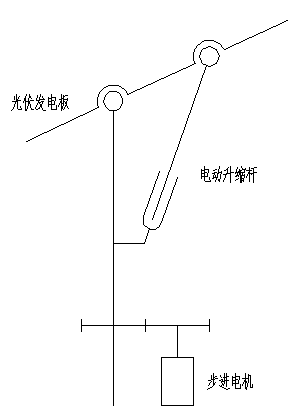
图3.1 角度调节机构示意图
3.2各器件的选择
3.2.1光伏发电板
此次设计中光伏发电板单块板可在晶科能源公司定做900mm*800mm规格,可以产生200w的功率,重量约10kg,防雨水,不用担心下雨时对光伏发电板产生损坏。
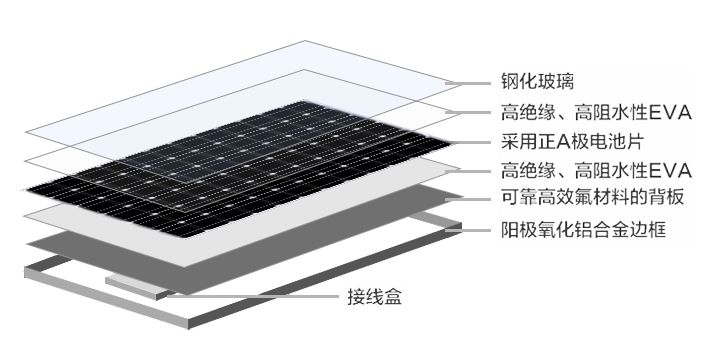
图3.2 光伏发电板结构
3.2.2步进电机
因为在太阳光与光伏发电板的成89度到91度夹角之间,光电转换效率基本不变,所以步进电机的转动角度精度在2度以下即可。由此选用雷赛86HS85型 86步进电机,步距角为1.8度,满足光伏跟踪机械部分所需要求。
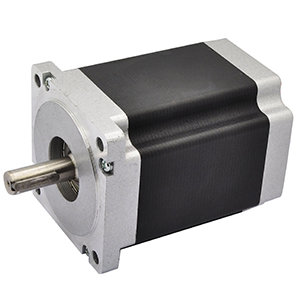
图3.3 雷赛86HS85 86步进电机
3.2.3电动升缩杆
要调节俯仰角则采用龙翔XTL100电动升缩杆,最大推力为500N,大于太阳能电池板的重力98N,速度为12mm/s,符合设计要求。
表3.1 电动伸缩杆的参数表
行程 | 驱动电压 | 额定载荷 | 伸缩速度 |
1000mm | 12V(DC) | 500N | 12mm/s |

图3.4 XTL100电动升缩杆实物图
3.3 传动齿轮设计
步进电机与控制方位角的中心杆之间通过齿轮传动,这个齿轮的规格需要进行计算来确定。
齿轮类型采用渐开线直齿圆柱齿轮。通过查阅资料可以了解到:渐开线齿轮的正确啮合的必要条件为两个齿轮分度圆上的模数和压力角都必须分别相等[5]。光伏发电板支架传动齿轮压力角采用标准的压力角20度,齿数选用为50。
当 及
及 时,齿轮的最小齿数
时,齿轮的最小齿数 应该满足
应该满足
(3.1)
式中  -齿顶高系数;
-齿顶高系数;
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: