面向擦玻璃机器人的Android 系统遥控APP设计毕业论文
2020-04-09 15:41:25
摘 要
面向擦玻璃机器人的远程控制设计了一套用于安卓操作系统的移动终端。论文的主要目的为:研究设计出一款可以在安卓系统上运行并且可以使用蓝牙通信控制擦玻璃机器人的应用。研究内容包括以下几个方面:
1.设计移动控制系统,使其可以实现远距离控制擦玻璃机器人的功能,方便使用。
2.编写一款基于安卓的手机app应用程序,安卓客户端可以分为系统界面设计和软件设计。3.从用户角度出发,赢设计易操作、舒适美观的客户端,而软件设计部分是对控制功能代码的编写,提供软件合理性和运行的可靠性。
4.测试本文设计的安卓客户端,并且在蓝牙通信状态下进行交互性测试,测试结果表明基于安卓手机的控制系统可以成功的给目标擦玻璃机器人进行发送指令,并且实现正常通信以操作其正常运行。
最终完成对本应用的设计、编码、测试。运行结果良好,基本满足设计要求。
关键字:安卓操作系统;擦玻璃机器人;app;界面;蓝牙遥控;
Abstract
A mobile terminal for Android's operating system is designed for remote control of glass cleaning robot. The main purpose of this paper is to study and design an application that can run on Android and can use Bluetooth communication to control the glass-wiping robot. The research includes the following aspects:
- The mobile control system is designed so that it can realize the function of remotely controlling the glass-wiping robot and is convenient to use.
- Write an Android-based mobile app application. The Android client can be divided into system interface design and software design. From the user's point of view, win the design of easy to operate, comfortable and beautiful client, while the software design part is the preparation of the control function code, providing software rationality and operational reliability.
- The Android client designed in this paper is tested and tested in the Bluetooth communication state. The test result shows that the control system based on the Android mobile phone can successfully send instructions to the target glass-wiping robot and achieve normal communication to operate its normal operation.
Finalize the design, coding, and testing of this application. The results of the operation are good and basically meet the design requirements.
Keywords:Android system;Bluetooth remote control;Glass cleaning robot;app;
目录
第1章 绪论 1
1.1 课题研究的背景: 1
1.2 课题研究的目的和意义: 1
1.3 国内外研究现状 3
第2章 系统需求分析 4
2.1 明确目的确定目标 4
2.2 根据需求制定方案并选择方案 4
2.2.1 通信方式选择 4
2.2.2 操作系统选择 6
第3章 应用设计方案 8
第4章 具体应用设计实现 17
4.1 安卓系统的架构及特征 17
4.1.1 应用程序层 18
4.1.2 应用程序框架 18
4.2 安卓应用程序的开发组件 19
4.2.1 Activity和View 19
4.2.2 Service 20
4.2.3 ContentProvider 20
4.2.4 Broadcast Receiver 20
4.3 安卓系统的界面控件 20
4.4 技术实现 21
4.4.1 界面布局编程 21
4.4.2 蓝牙协议 24
4.4.3 界面功能的实现 24
第5章 系统测试与结果分析 29
5.1 系统测试环境 29
5.2 系统测试步骤及结果 29
第6章 总结和展望 33
6.1 总结 33
6.2 展望 33
致谢 34
参考文献 35
第1章 绪论
1.1课题研究的背景:
近年来随着移动互联网技术的进步和智能终端设备的普及,有力的促进了移动终端对机器人控制产业的发展。随着安卓、IOS系统在智能手机中的广泛应用,和蓝牙、wifi等通讯方式的普及。以及智能机器人的普及例如扫地机器人、擦玻璃机器人。通过手机客户端和这些家居机器人系统建立连接的需求越加强烈。
1.2课题研究的目的和意义:
由于目前智能手机的极大普及和机器人的发展,手机上的通讯手段越加丰富,通过手机可以很方便的实现对其他设备的控制。因此我想要设计一款可以通过手机移动终端来进行操控机器人做出想进行的动作。免去厂家再专门配置遥控器的成本,也可以方便用户的使用,丰富了使用的场景,另外从本设计出发也可以延伸、借鉴到很多其他的通信设计方式。意义在于:通过移动终端人们可以实现对免去对机器人的有线控制方便使用,也可以将与生活紧密相关的信息数据结合在一起,通过整合这些数据为人们提供舒适、便利、智能化的生活。合适的移动终端应用可以通过整合住宅内各种电器设备、通信设施、和家庭防盗设备,整合的系统再结合嵌入式技术和综合布线技术等可以将整个家居设备融为一体。此外为了确保对机器人精确、方便、有效的控制,可以通过移动终端应用来实现对机器人的远程控制。打造舒适的生活体验。
移动终端对机器人的控制充分体现了计算机网络技术、综合布线技术、自动控制技术三种技术在现代生活中的应用。在整个现代家居生活中,通常有两种接入方式接入,即有线方式接入控制系统并设置开关按钮和无线方式接入智能家居系统,为了保证用户能够实时控制家居设备,移动终端系统的控制网络可以通过数据通信、网络通信等多种方式来确保实施,这和普通的移动居家机器人相比,移动终端对其有如下优点[2]:
(1)远程无线控制
远距离控制设备的能力是移动终端控制的一大特色。例如在住宅安装智能家居系统,用户可以在工作的同时,通过移动终端实时监测、査看、控制家中的机器人状态以及工作情况。(2)可拓展性
在现代生活中手机几乎成了每个人的必备,而通过在手机等终端实现对设备的控制可以大大减少其他诸如遥控器之类的物件,而通过手机亦可以与许多其他设备相连形成一个拓展系统。
(3)家庭安防方面
在移动终端对机器人的控制的应用里,确保用户住宅安全也是一个重要组成部分。通过在机器人身上连接有的各种传感器诸如烟雾报警器、温湿度传感器、可燃性气体传感器等能够24小时感应家庭内部环境,这些传感器也可以为用户提供最新的家居环境报告。一旦出现不安全的因素时,机器人会第一时间通过远程无线控制系统通知用户,进而保障用户的生命财产安全。
(4)高效节能环保
可以通过app设置不同的工作模式,不同的工作轨迹以适应不同的工作目标,按照工作量来匹配耗电不同的工作状态可以节省能源、高效环保,若通过wifi连接也可以远程控制家庭里的机器人提前做好清洁等各种工作,形成舒适良好的生活环境和生活体验。
然而目前移动终端控制机器人app存在的主要问题有[1]:
(1)缺乏高品质的系统解决方案
目前国内的智能家居产品现状基本差不多,缺乏高品质、成体系的系统化解决方案。尽管我们能看到不少移动终端app,但其主要功能也大多比较单一,没有形成较为系统、专业的控制模式,仅仅有开关等简单地控制。
缺乏统一的标准规范
在机器人方面,如今相同用处的机器人不同型号不同品牌都各自有自己的移动终端控制而缺少统一的规范以致购买不同的设备之后需要安装不同的app不能实现在同一控制系统中相互协调相互统一的进行工作这对于用户来说会带来极大的不便,因此确定一个统一的标准规范对于行业的发展大有裨益
(3)实用性不强
市场上很多移动终端产品简单的停留在某个功能的实现,而没有考虑其实用性。如通过手机控制家庭空气净化器,移动终端公司简单以为只有不停的运转空气净化器才能保证室内空气质量,却忽视了通过什么方式监测室内空气质量。单个功能的实现并不能满足人们的生活需求,因此整体性的多功能实现对控制终端产品尤为重要。
1.3国内外研究现状
进入21世纪,随着新材料、传感器技术、人工智能和计算机技术等得到全面发展,机器人技术也取得很大的突破。同时,伴随着人们的生活越来越好,人们对生活品质的提出了更高的要求,机器人正逐渐进入人们的生活之中,可以帮助家庭完成更多的工作。
例如扫地机器人早已经商业化的进入人们的生活可以较好的完成扫地的任务美国、欧洲、日韩等发达国家和地区已经对机器人领域投入极多人力与物力,开发出了很多性能强大的扫地机器人。
国内许多厂商在技术进步的同时根据市场需求也在这方面有较多发力,比如小米公司在2017年推出的小米扫地机器人,基友智能路径规划、断电续扫、自动回冲功能,并且配有相适应的控制app在连接app之后可以对机器人进行自主控制。机器人可以根据处理器形成地图划分区域和规划清扫路径形成先延边后Z字型的清扫路径,逐一完成分区清扫任务。
若清扫过程中电量低于20%,小米机器人将自动返回充电位置,电量充足后自动回到中断位置继续清扫,缩短了工作时间,提高清洁效率。机器人通过手机app终端可以随时安排清扫任务,上班前设置好每天的定时清扫时间下班后清洁工作即可完成。在app上还可以选择安静、标准、强力三种清扫模式。
第2章 系统需求分析
2.1明确目的确定目标
本应用的设计目的为以自行开发的一款新型擦玻璃机器人为对象,基于Android系统开发机器人遥控APP,通过该APP可实现机器人启停、轨迹及工作参数调整、任务进程显示等基本任务,并在此基础上搭建更为个性化操控方式。而在问题分析阶段分析人员需要考虑识别、综合、模拟用户的需求,去除用户需求中可能出现的模糊性、歧义、之处,并且需要分析系统对数据的要求,建立原始问题和目标软件的逻辑模型。分析人员更要结合自己平时的开发经验来理解用户的需求,进一步来发现是否有因为用户理解的片面性和对应用使用期限的误解而导致的不合理要求,哪些是用户尚未提出潜在需求但具有真正价值。
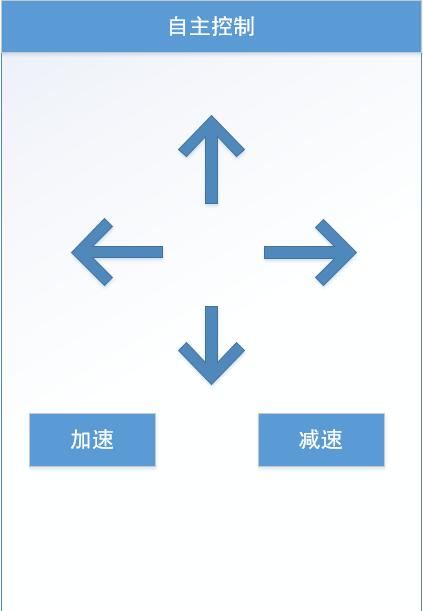
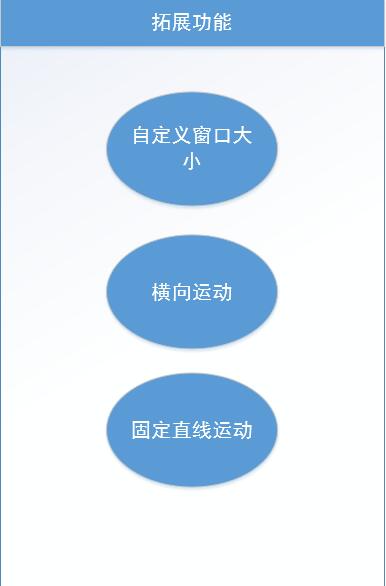
分析本应用的需求如下:满足用户远程操作机器人进行擦玻璃,免去了人亲力亲为的去踩高来擦玻璃。可以通过应用对目标机器人进行预设的模式操作,完成基本的前进、后退、左拐、右拐、暂停操作。当机器人开始运动时可以操作机器人进行左校准、右校准、加速、减速等基本操作;在此基础上对其进行预设的多种工作模式如定时工作模式、输入窗户大小进行固定擦玻璃模式、自动运行模式、手动运行模式等。
根据需求分析确定:
(1)可以在手机上正常安装运行;
(2)由于许多玻璃在房间中的位置较高用户踩高进行擦玻璃较危险所以应使用无线通信的模式进行控制,可以使用wifi或者蓝牙或者短信进行与目标擦玻璃机器人进行无线通信。
(3)在应用中编码,根据需求设定不同的模式来控制机器人的运动。
(4)设定良好的、人性化、易操作、简洁明了的人机界面,提升用户的体验,并尽量降低成本。
2.2根据需求制定方案并选择方案
2.2.1通信方式选择
目前用于家庭内部的无线通信传输技术主要是HomeRF技术、蓝牙技术、wifi技术等,下列是几种常见的无线通信方式[4]:
(1)HomeRF技术
除了移动客户端外,基于局域网的服务,全球移动通信系统(GSM)也可以用来进行信号传输。HomeRF旨在为用户建立具备互操作性的语音和数据通信网。HomeRF工作在2.4GHz频率上,可以对语音及数字信号进行高速传送,速率可高达100Mbit/s。其优势在于安全可靠、简单便捷,成本低廉。HomeRF标准工作频段和蓝牙一样,因此使用场景受限制。只能在短距离进行通信,但传输速率逊于蓝牙。
(2)Bluetooth技术[4]
蓝牙主要用于移动终端设备之间的近距离低功耗通信,实现数据交互、数据共享。蓝牙可以把设备连接到LAN和WAN上,优点在于可连接设备较多,成本低,体积小。
由于蓝牙技术具备传输速率高、安全性能强、简单易用、功耗低等优点,蓝牙技术被广泛使用在现代智能无线通讯系统中。WIFI、HomeRF和蓝牙三种技术在全球范围内都非常盛行。对比而言,蓝牙技术具备稳定性更强、跳频速度更快、低成本、简单易用的优势。
采用蓝牙来与擦玻璃机器人通讯则需要在擦玻璃机器人设备中置入蓝牙模块,在移动终端应用中加入蓝牙通讯的方法那么在近距离就可以稳定的向机器人发送指令进行遥控。整个系统会方便简介。并且移动终端可以连接多个设备进行遥控。
(3)WiFi技术
WiFi优势在于技术门槛较低,在日常生活中较为普及,只要设备连接到相应的WiFi网络即可使用。WiFi技术是目前传输速率最快的无线通信技术,因此可用于对机器人的控制。
WiFi通信模块将擦玻璃机器人通过无线方式接入通信网络,基于WiFi擦玻璃机器人可通过家庭网关、无线路由器实现电器数据共享。擦玻璃机器人的WiFi通信过程可以包含内部访问与外部访问两种方式。机器人通信模块本身具有WiFi功能,当用户处于居室附近时,可使用安卓等控制终端连接到连有擦玻璃机器人的网络进行访问。此外,通过室内网关,移动终端能够通过因特网实现远距离登陆,所以客户在超市、酒店、工作市等有万维网路所连接上当地的无线热点后,能够使用网络数据包进行远距离控制擦玻璃机器人。如图所示是wifi通信模块的两种连接方式。
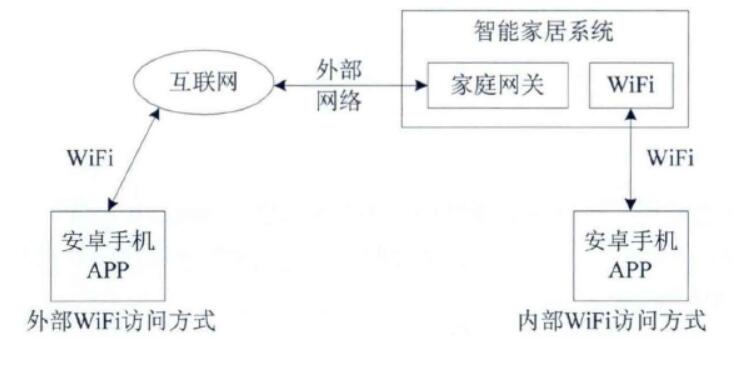
移动终端利用WiFi连接到擦玻璃机器人系统之前,首先需要明确所连接系统的无线连接信息。Wifi是一种数据通讯传输链接的协议,手机应用层利用WiFi的性能一般是在通过建立Socket的方式对系统内部进行访问,用户必须要了解WiFi接入点的基本链接信息。另外还必须了解对方(如信息接收核心模块)在WiFi网络中的IP地址码和接入端口号。和外部访问的模式相比,通过本身室内网关的端口接收等方式,无线连接的信息处理中心模块能够被映射成外网IP与端口组合,该信息必须在接入前被远程客户端获得。WiFi接入系统有两种方式。WiFi通信系统必须首先扫描在接收范围内的可接入wifi热点,且对扫描得到的所有热点和系统内部自带的WiFi热点的名称进行对比,以此来确认是否有可接入的Win热点以及是否在系统提供的WiFi距离内。如果借助WiFi进入万维网时,需要以放置于家庭网关的外接网路IP地址与其映射端口作为目的接入地址。如图所示是系统的WiFi访问示意图。
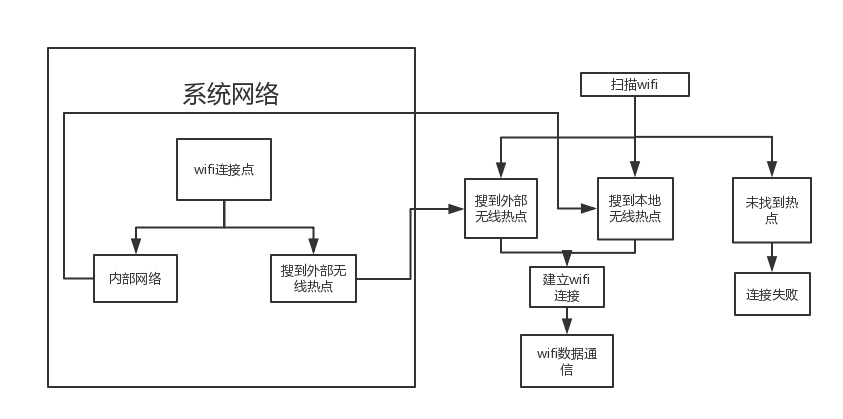
图2.1wifi示意图
综合分析以上三种通信方式并对其进行对比如下:
表2.1通信方式对比
通信方式 | 传输速率 | 传输距离 | 设计成本 |
HomeRF | 高 | 近距离通信 | 一般 |
蓝牙 | 高 | 近距离通信 | 较低 |
Wifi | 极高 | 接入互联网即可通信 | 较高 |
根据三种连接方式的优劣根据设计需求为在遥控机器人的方式上拟采用蓝牙通讯的模式,由于在本次的使用场景中仅需要在家庭中使用机器人时来进行操作,无需远距离操作,而且无线wifi连接通讯受制于带宽和网络稳定性,而蓝牙的价格较低,且近距离可以实时调整,因为选择蓝牙通信(4.0)进行本次移动终端通讯方式的选择。
2.2.2操作系统选择
目前应用在手机上的操作系统有Android、iOS、Black Berry、Symbian、Windows Phone
,但市场上的手机目前大部分以谷歌公司开发的安卓系统和苹果公司开发的ios系统为主。
下面根据这两种操作系统进行简单介绍,并比较各自优劣从中做出最符合本设计需求的选择。
谷歌公司参与研发的安卓系统,是一种基于Linux的操作系统,其底层主要用C语言、C++语言编写,应用层主要用Java语言进行编写。其主要应用于移动终端设备,比如智能手机、平板电脑等智能终端都可以搭载安卓系统。随着越来越多软件爱好者的参与和推广,安卓系统逐步占据全球操作系统的大部分市场份额。
iOS是苹果公司开发的一款操作系统(跟Windows 7、Windows XP一样,都是操作系统)
目前有如下操作系统配备这款操作系统:iPhone、iPad、iPod touch、iPad mini、Apple TV、Apple Watch等 ,早期只有iPhone的时候该操作系统叫做iPhone OS,当其他产品设计出来(也搭载这款操作系统)后,更名为iOS 。软件语言为C、C 、Objective-C(OC)、Swift 可选。iOS开发:移动开发(手机开发) 。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: