无人机光电吊舱控制系统设计毕业论文
2020-04-10 16:07:25
摘 要
融合了诸多先进技术的光电吊舱作为飞行器最重要的装载装备发展迅速。本文就是基于这一背景并结合了企业的实际需求设计了一款通用稳定的无人机云台。该云台采用开源硬件模块开发,能够较大限度的承受外界干扰保持自稳,并能实现远距离无线通信控制,采用各种实用的滤波算法达到了数据的稳定。
在硬件方面主要完成了主控板,无刷电机以及姿态采集模块的选型调试工作。在软件方面主要完成了云台控制软件的编写,包括姿态数据采集与解算、PID控制算法的实现、误差分析与矫正、还有基于QT的上位机软件的编写,包括串口读写、波形显示、仪表盘等功能的实现。
最后进行了系统的调试与滤波效果验证,对无线通信的功能进行定义,通过设计调试与运行,验证了设计的无人机云台,实现了预期功能。
关键词:光电吊舱;姿态采集与解算;数据滤波;QT
Abstract
Photovoltaic pods incorporating many advanced technologies have developed rapidly as the most important loading equipment for aircraft. This article is based on this background and combined with the actual needs of Flextronics to design an UAV gimbal. The gimbal is developed using open source hardware modules, able to withstand external interference to a greater extent to maintain self-stability, and Can achieve long-distance wireless communication control, using a variety of practical filtering algorithms to achieve the stability of the data.
In terms of hardware, the main control board, brushless motor and attitude acquisition module are selected and debugged. In terms of software, it mainly completed the preparation of PTZ control software, including attitude data acquisition and calculation, implementation of PID control algorithm, error analysis and correction. There is also QT-based PC software, including serial read and write, waveform display, instrument panel and other functions.
Finally, the system's debugging and filtering results were verified, and the functions of wireless communication were defined. The basic functions of the PTZ were basically realized. At the same time, the problems in the debugging process were analyzed and summarized, and the optimization of the program was put forward. Opinion.
Keywords: Optoelectronic pod;attitude acquisition and solution; data filtering;QT
目录
第1章 绪论 2
1.1 论文研究背景及意义 2
1.2 国内外发展现状 2
1.3 相关政策和法规 2
1.4论文各章内容安排 2
第2章 系统总体设计方案 2
2.1 设计需求分析 2
2.2 硬件总体方案设计 2
2.3 系统软件设计方案 2
2.3.1 无人机吊舱主控程序设计 2
2.3.2 QT地面站上位机软件程序设计 2
第3章 系统硬件选型 2
3.1 云台主控板选型 2
3.2 云台姿态采集模块 2
3.2.1 传感器选型 2
3.2.2 传感器工作原理分析 2
3.3 电机驱动模块 2
3.3.1 电机选型 2
3.3.2 电机驱动电路分析 2
3.4 无线通信模块 2
3.5 电源模块 2
第4章 无人机载荷控制软件设计 2
4.1 姿态测量解算模块 2
4.1.1 姿态测量模块的初始化 2
4.1.2 姿态解算算法实现 2
4.2 主控板PID算法实现 2
4.2.1 PID算法介绍 2
4.2.2 PID参数整定 2
4.3 电机驱动模块程序设计 2
4.3.1 PWM波的产生 2
4.3.2 精确控制的实现 2
4.4 无线通信模块 2
4.4.1 通信协议 2
4.4.2 算法实现 2
第5章 基于QT的上位机软件编写 2
5.1 QT及QWT简介 2
5.2 上位机软件程序设计 2
5.2.1 软件UI设计 2
5.2.2 程序设计实现 2
第6章 系统联合测试 2
6.1 横滚角和俯仰角滤波效果测试 2
6.1.1 测试工具和步骤 2
6.1.2 测试过程 2
6.2 偏航角的滤波效果测试 2
6.2.1 测试工具和步骤 2
6.2.2 测试过程及结论 2
6.3 自稳功能、控制功能测试 2
6.3.1 测试工具及步骤 2
6.3.2 测试过程及结论 2
6.4 上位机软件测试 2
6.4.1 测试工具及步骤 2
6.3.2 测试结论 2
6.5系统联合测试 2
6.5.1 测试工具及步骤 2
6.5.2 测试过程及结论 2
6.6 设计测试总结 2
第7章 总结与展望 2
7.1 全文总结 2
7.2 展望 2
参考文献 2
致谢 2
第1章 绪论
- 论文研究背景及意义
在过去的几十年时间里,随着传感器技术、微电子、无刷电机以及电池技术的不断进步,小型无人机已经成功应用于许多领域。比如电影拍摄、实时监控、地面勘探等飞行任务。
而融合了光机电技术的吊舱作为无人机的最重要的装载装备,其主要作用是隔离载体的扰动、保持视轴稳定,同时实现对侦察目标的自动识别与跟踪[1]。光电吊舱的有效载荷根据执行任务的不同而采用不同的组合搭配。
 中国2014年无人机销量约2万架,其中军用无人机约为1.4%,民用无人机占98.6%,
中国2014年无人机销量约2万架,其中军用无人机约为1.4%,民用无人机占98.6%,
图1.1 云台搭载GoPro相机的DJI无人机
受低空逐步开放的利好,国内无人机发展十分迅猛,著名无人机厂商大疆凭借着四旋翼无人机Phantom,并提供能够挂载GoPro运动相机的连接架重新定义了航拍的可能,迅速成为了世界上销量最大的四旋翼飞行器巨头[5]。随着市场需求的增长与价格持续亲民化,我国无人机市场迎来了快速发展。据数据统计显示,2017年,无人机市场有望实现50万台以上的出货量,预计到2019年无人机出货量将突破200万台[2]。 无人机的广泛普及显著推动了各行各业的全新变革。
- 国内外发展现状
目前,搭载各种先进传感器的光电吊舱被世界各国广泛应用。例如,以色列军方研制的MOSP云台系统,英国的Phoenix云台系统,美国的“捕食者”战略无人机上装备的“天球”云台系统等[2]。这些云台不但本身旋转灵活、精度高,而且多种高精度传感器如激光设备更让它们如虎添翼。
近年来光电吊舱也出现了许多新技术,如自动辅助目标识别技术(ATR),该技术能够增强从图像场景中提取有用信息,大大提高探测概率与距离;又如多光谱和超光谱摄像技术,该技术从可能够区分见光到红外波段的几十个频带,空间分辨率能够达到从几厘米到几米,可使军事监控目标与背景相比有更强的彩色比对[3]。
- 相关政策和法规
工业和信息化部日前印发了《关于促进和规范民用无人机制造业发展的指导意见》以规划无人机行业的未来方向。《指导意见》统筹促进产业发展和强化安全管控的要求,坚持以发展促进安全,以安全保发展。《指导意见》提出大力开展技术创新、提升产品质量性能、加快培育优势企业、拓展服务应用领域、建立完善标准体系、强化频率规范使用、推进管控平台建设、推动产品检测认证,促进我国民用无人机制造业健康有序发展[4]。
此次要设计的光电吊舱就属于指导意见中提到的技术创新。开展无人机相关技术的研究契合了国家向智能制造的方针,因而具有较高的社会和经济效益。
1.4论文各章内容安排
本设计研究了基于开源云台控制板的光电吊舱设计,实现了云台的自稳功能、远程遥控功能、以及对上位机的监控功能。论文各章内容安排如下。
- 为绪论,主要是对无人机光电吊舱的研究背景及意义、国内外发展现状。
- 为系统总体设计方案的介绍,首先对本次课题所需要设计的无人机光电吊舱的设计需求以及相关技术指标作了简要分析,而后根据分析提出了无人机光电吊舱的硬件系统及软件系统的设计方案。
- 为硬件系统的选型设计,包括主控板、云台姿态采集模块、电机驱动模块、无线通信模块和电源模块做了介绍。
- 为云台电控软件的设计,主要介绍了姿态测量解算模块、主控板PID算法的实现,电机驱动模块的设计开发工作。
- 为云台上位机软件的设计,主要介绍了以可跨平台的QT为开发平台,采用C 进行编程的无人机地面站的开发设计工作。
- 为系统调试与分析,主要对软件开发滤波效果的调试和记录和系统整体并对在调试过程中产生的相关问题进行了简要的分析。
- 为总结与展望,首先对本次设计无人机光电吊舱碰到问题以及所取得的具体成果进行了总结,并且对所设计的云台未来的改进及优化发展作了简单的阐述。
第2章 系统总体设计方案
2.1 设计需求分析
本文设计的无人机光电吊舱系统作为飞行器上最重要的装载设备,主要用于无人机载荷控制,主要实现的功能有:完成云台吊舱系统硬件集成设计、电控软件设计,与遥控的无线通信,基于QT的上位机开发。
在设计时应遵循以下原则:
(1)稳定性与快速性:保证云台控制响应的稳定性和快速性是本次设计的核心。本次设计的硬件选型、姿态解算算法、PID控制算法都应考虑到系统的稳定性与快速性实现;
(2)规范化:在本次设计中软件开发规范化方便移植。主要包括设计流程规范化、软件编写规范使易于维护、硬件选型通用。
(3)经济性:根据实际使用需求进行不同的硬件模块搭配、使和市面上的云台相比具有一定的经济性。
主要的功能及技术要求:
(1)温度范围:0~50℃;
(2)供电电压: 12V;
(3)重量:1126g;
(4)云台架材质:铝合金;
(5)旋转范围:横滚±55° 俯仰±60° 偏航±60°。
2.2 硬件总体方案设计
根据前面对光电吊舱功能需求分析,硬件总体设计方案如图2.1所示;系统主要硬件组成包括四部分:云台控制器部分,姿态测量部分、运动控制部分、无线通信控制部分。

图2.1 无人机光电吊舱硬件系统设计框图
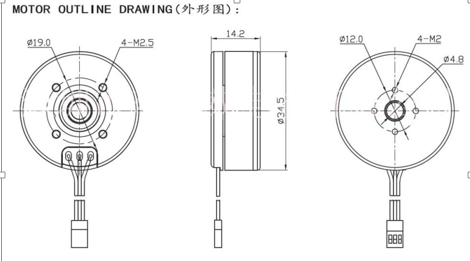
云台控制系统多以单片机为主控芯片,也有使用DSP、ARM或者CPLD。控制系统完成的基本功能是控制云台的横滚、俯仰、偏航转动;若任务载荷具有可控部分,如摄像机的焦距、景深等,那么也应对这些参数进行调节[6]。根据云台系统的复杂程度来进行具体选型,本设计中使用了ARM Cortex-M3 32位STM32F103RCT6作为主控器。姿态测量部分则选取了两个MPU6050用于三轴角度的姿态反馈。运动抵消部分采用了三个Dongxingwei公司的C2805无刷电机。无线通信部分采用了2.4GHz的无线通信模块,其优点是丢包能够自动回传。
2.3 系统软件设计方案
2.3.1 无人机吊舱主控程序设计
云台的电控程序主要是基于STM32F103RC的设计与实现,程序总体设计如图2.2所示,主要包括姿态解算模块、电机控制模块、无线通信模块、PID控制模块等。

图2.2 无人机光电吊舱控制软件设计框图
2.3.2 QT地面站上位机软件程序设计
本节主要介绍基于QT的上位机软件设计,主要实现的功能有:
(1)基本串口收发功能;
(2)三轴角度显示,包括量程指示、当前角度指针指示;
(3)三轴角度实时波形显示;
上位机系统的总体设计如图2.3所示:
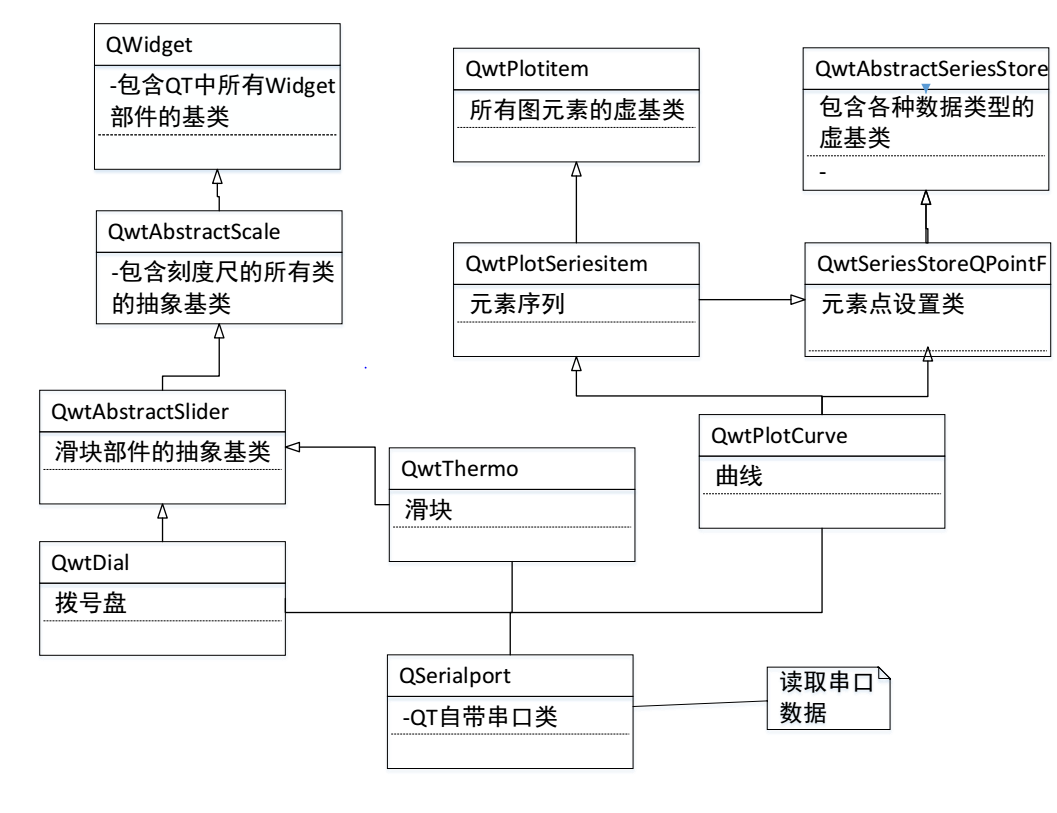
图2.3 基于Qt的地面站上位机UML类图
第3章 系统硬件选型
本次设计的系统硬件主要由云台主控板、电机驱动部分、姿态采集部分、无线传输部分组成。云台主控板采用的是STORM32BGC云台控制器,主要实现对云台的控制和与遥控器的无线通信功能。电机驱动模块主要由电机驱动器和直流无刷电机组成,通过云台主控板可输出三路互补PWM信号驱动直流电机芯片,从而控制云台的三轴转动。姿态采集模块则采用了两个集成了加速度传感器和三轴陀螺仪的MPU6050芯片,此芯片可以检测出相机在空间中的三维角速度和加速度,然后使用I2C通信与主控板通信,并过欧拉角解算相机的三维姿态[7]。无线通信模块使用同组同学配套硬件,接收三轴角度信号和模式切换指令,云台主控板解算出对应的PWM值控制电机的转动,实现云台的遥控功能。云台供电使用AC-DC12V稳压电源供电。
3.1 云台主控板选型
本次设计采用的主控板是如图3.1所示的STORM32BGC控制器,拥有非常活跃的开源硬件社区,其为云台控制和电机控制做了一定的优化,具有如下特征:
- 云台处理器MCU使用STM32F103RC,该芯片基于ARM Cortex-M3 32位的RISC(Reduced Instruction Set Computer,精简指令集计算机)内核,工作频率最高可达72MHz,内置256KB Flash和48KB SRAM,具有丰富的增强IO端口和联接到APB总线的外设,共有64个外部引脚,支持I2C、SPI、USART、CAN等标准通信接口。
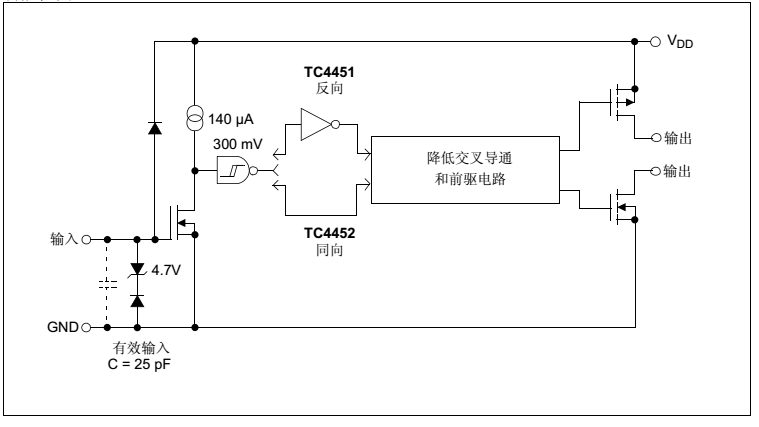
- 具备三路电机驱动芯片TS4402。
- 外接两路I2C接口,可同时实现板载MPU6050和相机处MPU6050的姿态数据。
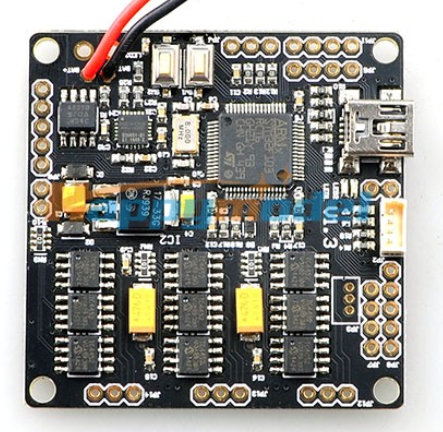
图3.1 STORM32BGC实物图
3.2 云台姿态采集模块
姿态采集模块的作用是反映当前云台载荷如相机当前的姿态,作为云台控制系统的信息采集模块,其设计关乎整个设计的成功与否。
3.2.1 传感器选型
云台姿态采集模块采用InvenSense 公司如图3.2所示的MPU6050 作为主芯片,能同时检测三轴加速度、三轴角速度的运动数据以及温度数据。MPU6050 是一种采用MEMS(Microelectro Mechanical Systems)技术生产的新型传感器,它具有很多优点,如质量轻、体积小、耗能小、造价低、较高的集成和开发能力等[9]。可直接通过I2C接口向主控器输出姿态数据,频率最高可达200Hz,非常适合用于对姿态控制实时要求较高的领域,常见应用于手机、智能手环、四轴飞行器及计步器等的姿态检测[10]。
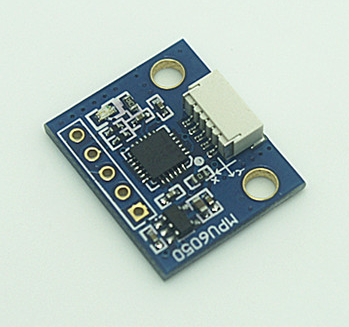
图3.2 MPU6050六轴传感器
3.2.2 传感器工作原理分析
MPU6050对陀螺仪和加速度计分别用了三个16位ADC(Analog to Digital Converter,模数转换器)将其测量的模拟量转化为可输出的数字量,当传感器绕着任何一个轴旋转,通过电容器截止产生的振动引起科里奥利(Coriolis effect)效应,将得到的信号放大、解调和过滤,使产生的电压和角速度成正比,再通过ADC将电压转换成数字量[11]。
MPU6050模块电路图如图3.3所示,它拥有117个寄存器,可通过程序对寄存器进行配置,改变传感器的输出。其中地址0x1B的GYRO_CONFIG寄存器,可编程配置陀螺仪的满量程范。

图3.3 MPU6050模块电路图
围,可配置的范围有±250、±500、±1000、±2000°/s(dps)。地址0x1C的ACCEL_CONFIG寄存器,可编程配置加速度计满量程方位,可配置的范围有±2g、±4g、±8g、±16g。MPU6050内嵌的温度传感器可通过读取0x41和0x42获得一个16位数值,可用于温度补偿。
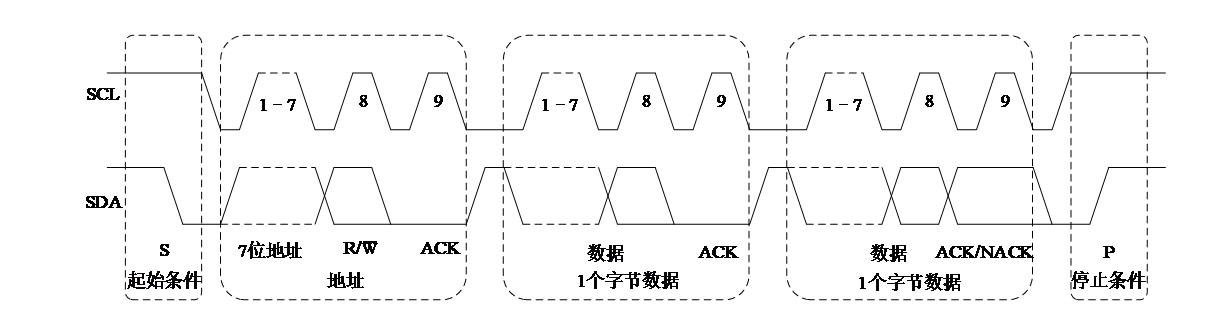
与MPU6050的通信是基于I2C串行总线。I2C是两线的总线,由串行数据SDA线和串行时钟SCL线在连接到总线的器件间传递信息,每个器件都一个唯一的地址识别,而且都可以作为一个发送器或接收器(由器件的功能决定),同时I2C是多主机的总线,数据传输速率在标准模式下可达100kbit/s,在快速模式下可达400Kbit/s[12],在高速模式下可达3.4Mbit/s。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: