1 嵌入式低成本GNSS/INS组合高精度定位技术研究开题报告
2020-04-12 15:38:20
1. 研究目的与意义(文献综述)
1.1课题研究目的及意义
导航系统是汽车、舰船、航天器等载体上的重要设备,其主要任务就是在预先规定好航行计划的前提下,以要求的精度,在一定时间内将载体引航到目的地。随着科学技术的发展,目前已出现了多种适用于航行体的导航系统。虽然他们各自都有优点,但也有其固有的不足之处。例如GNSS(Global Navigation Satellite System)能够为全球提供全天时、全天候的位置、速度和时间信息,精度不随时间变化。但GNSS不能提供载体的姿态信息;并且GNSS较低的数据更新率不能满足动态变化范围较大的应用;另外当信号受到干扰或遮挡时,会造成GNSS的失效。而INS(Inertial Navigation System)作为自主导航系统,在短期内有很高的定位精度,且其采样频率往往能达到200HZ,具有较好的动态响应,但由于惯性器件误差的影响,其定位精度随时间增长而迅速恶化,因此无法长时间单独工作。显然 GNSS与INS在性能上形成互补,两者组合后的优点体现在:对惯导系统可以实现惯性传感器的校准、惯导系统的空中校准等,从而可以有效提高惯导系统的性能和精度;而对GNSS系统,惯导系统的辅助可以提高接收机的动态特性和抗干扰性。因此GNSS/INS可以组成一种比较理想的导航系统,其精度、完好性、可用性及连续性均优于单一系统。T.D.Tan、L.M.Ha等在2007年对在GPS信号受到阻挡期间的车载GNSS/INS组合定位系统进行了研究,其采用了8状态变量的Kalman滤波器来提高GNSS与INS的组合性能,研究表明相比于单纯使用GNSS或INS,GNSS与INS组合可以有效提高定位精度,且增加Kalman滤波器的状态空间变量数可以增加参数估计的准确性[1]。
随着高精度定位产业日趋成熟,亚米级导航定位装置需求旺盛。而目前GNSS/INS组合导航设备价格居高不下,严重制约了亚米级导航定位装置的推广及应用。研制低成本高精度GNSS/INS组合导航定位装置成为领域研究的热点。本课题重点研究低成本GNSS/INS组合导航定位算法的嵌入式实现。
1.2国内外研究现状
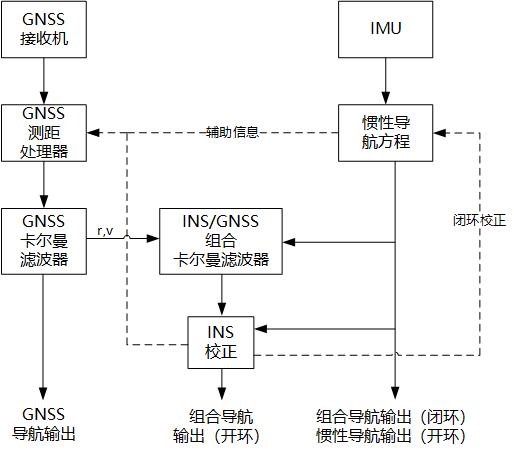
图1-1GNSS/INS松组合结构
松组合是最简单的组合方式,GNSS输出的位置/速度作为测量输入给组合Kalman滤波器,组合Kalman滤波器用它来估计INS误差,并对INS导航参数进行校正,矫正后的INS导航参数构成组合导航输出。该组合方式简单、易于实现,缺点在于至少要存在4颗卫星才能得到GNSS导航信息来对滤波器进行更新。且这种组合导致滤波器的串联,使组合导航观测噪声时间相关,不满足Kalman滤波器观测噪声为白噪声的基本要求,严重时可能使滤波器不稳定[3]。
紧组合结构如图1-2:
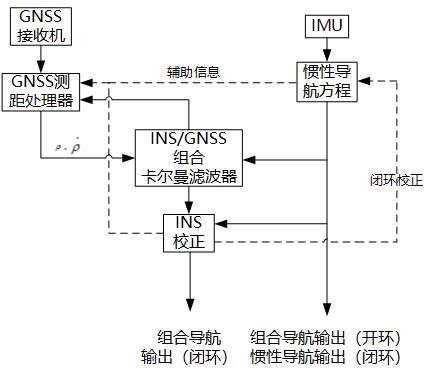
图1-2GNSS/INS紧组合结构
紧组合是一种相对复杂的组合方式,源于GNSS测距处理器的伪距和伪距率构成Kalman滤波器的量测输入,滤波器采用这些量测信息来估计INS和GNSS系统的误差,与松组合结构相同,组合导航参数是校正后的惯性导航参数。其中伪距源于码跟踪,而伪距率源于更为精确、但鲁棒性差的载波跟踪。袁俊刚、范胜林等在2010年对GPS/INS紧组合导航系统进行了研究,仿真结果表明组合系统可以明显的减少组合导航系统的误差,提高了系统的定位精度和可靠性[4]。Gianluca Falco、Marco Pini等在2016年,使用低价的MEMS惯性元器件与常用的GNSS接收机,对GNSS/INS组合导航分别使用松组合、紧组合在市区的定位进行了比较,结果表明使用紧组合可以有效降低定位误差[5]。
超紧组合组合结构如图1-3: 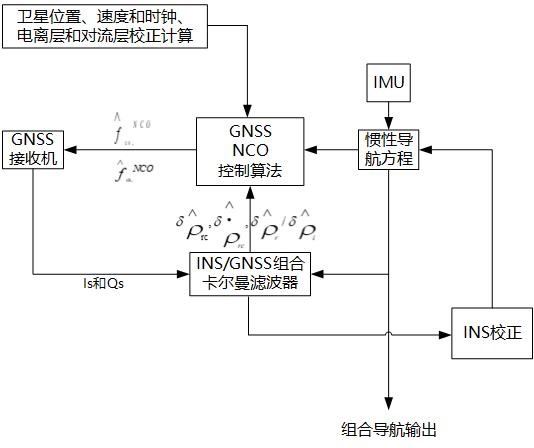
图1-3GNSS/INS超紧组合结构
超紧组合更为复杂,除了完成紧组合的工作外,还需使用校正后的INS信息对接收机内部的载波环、码环进行辅助跟踪,由于超紧组合涉及到对接收机内部电路的更改,国内条件不成熟,目前的研究主要停留在算法仿真;国外则对超紧组合进行了一系列深入研究并搭建了实验平台。
国内外学者对上述三种组合方式做过大量的研究,其中李倩在2010年对GNSS/INS组合导航中普遍存在的GNSS与INS数据时间不同步问题进行了研究,设计出了一套基于FPGA的GNSS/INS时间同步方法[6]。邓超慧在2011年对嵌入式GNSS/INS松组合导航进行了研究,设计出了基于ARM9的硬件平台,WinCE操作系统的嵌入式组合导航系统并进行了实时测试,定位精度为2.5m[7]。
影响GNSS实时单点定位精度的因素很多,其中最主要的因素有卫星星历误差、大气延迟误差和卫星的钟差等。由于上述误差从总体上讲有较好的空间相关性,因而相距不太远的两个测站在同一时间分别对单点定位时,上述误差对两站的影响就大体相同[8]。如果我们能够在距离较近的一已知点上配备一台GNSS接收机并和用户一起测量,便可求得上述误差对站坐标的影响,再将此误差发送给在附近工作的用户,用户在对上述误差进行补偿后,其定位精度就能大幅度提高,这便是差分GNSS的原理。按照观测值类型可将差分GNSS分为伪距差分、载波相位差分和介于两者之间的相位平滑伪距差分。其中伪距差分最简单,但精度最低;载波相位差分精度最高,但会受到载波周跳的影响;而载波相位平滑伪距差分的精度介于两者之间,且同样会受到载波周跳的影响。
彭元、符杰林等在2017年对GPS/BDS组合伪距差分定位进行了研究,设计了基于树莓派的嵌入式GPS/BDS组合定位系统并进行了测试,达到了0.5m的定位精度[9]。但其将GPS与北斗进行组合,虽然定位精度有所提高,但仍具有卫星定位共同的缺点。吴富梅、唐颖哲在2010年对基于载波相位平滑伪距技术的GPS/INS组合导航进行了研究,采用松组合,进行事后解算,在不发生周跳的情况下,基于载波相位平滑伪距技术的GPS/INS组合导航的精度较伪距差分组合导航有较大提高;反之精度提高不明显[10]。刘洋在2016年对基于载波相位时间差分测速的GPS/INS组合导航进行了研究,采用松组合,进行事后解算,定位精度达到了0.7m[11]。
上文提到在紧组合中使用载波相位定位时,虽然精度较高,但是会受载波的周跳影响。韩厚增、王坚等人在2015年对GPS/INS紧组合的INS辅助周跳探测与修复进行了研究,提出了一种周跳检测阈值自适应确定方法,在GPS信号失锁时能较好的修复周跳[12]。
GNSS/INS组合定位算法的研究目前主要集中在Kalman滤波上,XiaohongZhang、Feng Zhu等在2016年针对RTS平滑(Rauch–Tung–StreibelSmoother,RTSS)与前后向Kalman滤波(Forward–Backward combination,FBC)各自单独使用时都存在不足的问题,提出了一种将两者结合在一起的平滑算法,研究表明使用此方法可以显著提高GNSS/INS紧组合的绝对定位精度[13]。针对无迹Kalman滤波(UKF)鲁棒性不强的问题,朱立新、马春来等在2014年提出了基于交互式多模型(IMM)的混合平方根无迹Kalman滤波(SRUKF)算法,仿真结果表明新算法能够以适当的时间复杂度,获得较强的鲁棒性能,适用于复杂的导航环境[14]。标准Kalman滤波算法一般假定系统方程与观测方程均为线性,然而GNSS/INS组合定位系统通常不能满足这一假定。王坚、刘超等人在2011年针对此问题提出了一种抗差EKF算法,EKF算法可实现非线性系统的线性近似,进一步提高求解精度,而抗差EKF算法将组合导航异常值干扰分为单粗差、多粗差和缓慢增长误差三类,并将粗差归入函数模型,仿真表明抗差EKF算法可将导航解的误差精度从dm级提高为cm级甚至mm级,导航精度及可靠性得到明显提高[15]。
研究上述文献可以发现,国内外对GNSS/INS组合导航有较多的研究,但是对嵌入式低成本高精度GNSS/INS组合导航的研究不多,或者尽管有研究但精度较低,且国内外的研究多集中在仿真或对采集的数据进行事后解算,对于实时性要求较高的场合研究较少。其中对于GNSS的数据处理,大多基于位置、速度解算或伪距解算,对基于精度更高但更复杂的载波解算的研究较少。对于GNSS/INS的组合方式,限于研究条件,国内研究多集中在松组合与紧组合,其中紧组合精度更高、适用范围更广,已成为研究热点。对于低成本IMU的选取,随着这些年MEMS传感器的兴起,使用MEMS IMU作为惯性元器件已成为十分合适的选择。但低成本IMU,例如MEMS IMU不可避免会存在各种误差,其中最主要的就是陀螺仪的误差。理想情况下,陀螺仪仅测量旋转速率,与其他无关。但实际上,由于机械设计不对称或微加工精度不够,所有陀螺仪都有一定的加速度敏感误差,其中最显著的就是对线性加速度的敏感误差(g敏感误差)。Chen Fan、Xiaoping Hu等在2014年对陀螺仪的g敏感误差的可观性进行了研究,并将此项数据作为一个状态变量加入Kalman滤波器的状态方程。研究结果表明,陀螺仪的g敏感误差是可观的,且在将其进行补偿后INS的定位精度得到了显著提高[16]。
2. 研究的基本内容与方案
主要研究内容及目标如下:
(1)gnss/ins组合导航软件架构设计。学习数据解码、差分gnss算法、gnss/ins组合导航定位算法流程,了解组合导航算法原理,结合ublox定位模块以及inversense mems模块,设计嵌入式gnss/ins组合导航软件架构。
(2)网络差分ntrip协议顺从与实现。学习ntrip通讯协议的通讯原理,完成ntrip通讯协议的编写,实现基于ntrip通讯协议用户登录、数据请求、位置上传。
3. 研究计划与安排
第1-2周:查阅相关文献资料,明确研究内容,了解研究所需的相关知识,确定方案,完成开题报告。
第3-4周:完成英语论文翻译和熟悉原理、方法。
第5-6周:完成开发环境的搭建、arm上linux的移植和驱动程序的设计。
4. 参考文献(12篇以上)
[1]t.d.tan,l.m.ha,n.t.long等. land-vehicle mems ins/gpspositioning during gps signal blockage periods[j]. vnu journal of science,2007,(23):243-251.
[2]paul d.groves. gnss与惯性及多传感器组合导航系统原理[m].李涛,练军想,曹聚亮等,北京:国防工业出版社,2011:320-321.
[3]艾伦,金玲等.gps/ins组合导航技术的综述和展望[j].数字通信世界,2011,(2):58-61.



