基于非特定语音识别的人工智能小车控制系统设计开题报告
2020-04-13 13:42:31
1. 研究目的与意义(文献综述)
1. 语音识别技术及发展现随着电子、信息技术的飞速发展,语音识别被广泛的应用在各个领域。常见的应用领域有:语音输入系统,如于键盘输入方法;语音控制系统,如工业控制、语音拨号系统、智能家电、声控智能玩具等;智能对话查询系统,银行服务、股票查询服务等等。
语音识别是一门交叉科学,涉及多门学科,包括信号处理、模式识别、概率论和信息论、发声机理和听觉机理等等。语音识别技术是使机器通过识别和理解把语音转变为相应的文本或命令的技术。
一个完整的语音识别系统可大致分为三部分:
2. 研究的基本内容与方案
本次智能小车系统的设计主要围绕人机对话来实现,其基本功能如下:
1. 设置语音锁,只有特定的语音词汇才可以启动小车。
2. 实现语音应答,根据发声人的指令,小车的扬声器做出语音应答,同时执行命令,如前进,后退,右转,左转等动作。
3. 可实现语音教学命令,即通过语音应答教会小车新的动作。
为实现以上目标,整个系统分为硬件系统和软件系统来设计。
硬件系统设有三大模块,即:传感器模块,处理器模块,执行器模块。传感器模块即语音识别模块,具体来讲就是非特定人声语音识别模块,这是整个系统的前端,主要功能是进行语音学习,识别,播报。处理器是系统的中枢,主要完成语音命令的处理和回馈。执行器即小车的动力系统,它将处理器的反馈具体的执行出来。
硬件系统设计框图如下: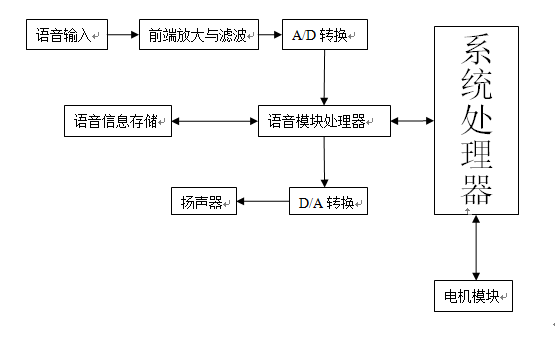
| |
软件系统是硬件系统的支撑,因此软件系统是和硬件系统相互对应的。需设计有语音模块程序,电机动力驱动程序,语音信息读取和存储程序。
其中语音模块程序占了总体程序的很大部分,它需要预先对语音信息进行采集,存储,为后续语音识别做好工作准备,总共分为语音训练程序和语音识别程序,其中语音训练是为了提前采集语音信息,“教会”处理器匹配到相应信息后该做哪些决断,而语音识别程序则是采集声音信号,以便与已存储的语音信息比较,其程序流程图分别如下:
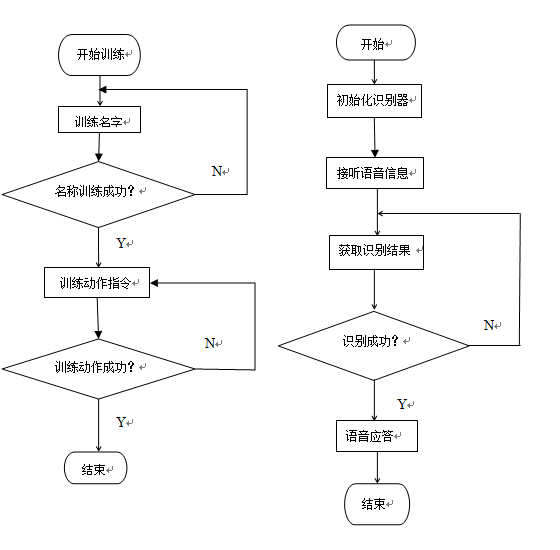
| |
当处理器语音识别成功后,在语音应答的同时还向电机发送动作指令,控制电机的正反转和转动快慢,使电机做出相应动作。整体的软件框图如下:

根据系统需求,有如下两种预设方案:
方案一:
采用8051系列单片机中的AT89C51做为控制核心,采用LD3320A语音模块,另配两个电机驱动的小车搭载如上硬件。
当语音指令发出时,语音信号经由LD3320A的声音传感器采集,然后经AD转换及专用的语音芯片对声音编码,并储存声音模型到外扩的flash芯片中。当外界语音命令输入时,单片机判断经AD转换后的数字信号与flash芯片中存储的语音模型的相似度,以此来识别外界语音命令。
同时,51单片机向电机发送相应指令,如发出“前进”命令时,两电机同时向前转动,向左时一个电机向前转,一个向后转。以此来实现设计目标。
这些都需要大量计算,普通的单片机往往不能实现这么复杂的过程和算法,即使勉强实现也要加很多的外围器件。这就不可避免的要增加个功能部件之间的连线,减弱了整个系统的抗干扰性,从而使语音控制、语音识别的精度降低。
方案二:
采用SPCE061A单片机,该种单片机拥有同类型单片机的通用功能,而且最大的特点是它具有语音识别处理能力。决定了SPCE061A单片机不需要外扩语音识别模块,就能做到语音识别功能。相当于之前系统设计框图中的“语音模块处理器”和“系统处理器”和到一起,然后再添加一些外设,即可完成系统设计目标。
采用凌阳科技公司的SPCE061A单片机做为控制核心,采用MIC输入模块,把声音信号转换为电信号,输入到该单片机专用于声音的ADC通道,经自动增益AGC放大,几次语音命令训练,把由A/D转换后的数字信号即声音模型存储到32K的Flash中。外界输入语音命令时,声音信号经由专用ADC通道转换,和已经存储的声音模型比较,当达到一定的相似度时,即判断为识别出语音命令,返回相应的函数值,以此来判断语音命令,根据此返回的命令值来驱动小车的电机来实现小车的行驶状态的控制。此过程中根据语音命令的识别结果,使SPCE061A输出相应的语音提示。
相比较两种系统设计方案,方案一的设计需花时间匹配51单片机模块和语音模块之间的I/O口和信息资源,而且需要添加一些外围器件。这就不可避免的要增加个功能部件之间的连线,减弱了整个系统的抗干扰性,从而使语音控制、语音识别的精度降低。但是作为设计者来说对51单片机的熟悉程度很高,操作起来可能熟练些。
方案二的设计硬件部分集成度较高,没有各部分连线等问题的干扰,稳定性会高一些,需添加的外围器件较少,准确度更高。但相应的缺点是该种单片机相对陌生,再熟悉单片机时会耽误一些时间,更具挑战性。
从成本来看的话,方案一的成本较高,因为较多的外围器件。
综合考虑以上两种方案,还是选择方案二,因其成本较低,且实现相应的功能稳定性较高。
3. 研究计划与安排
第01-02周:查阅相关文献资料,明确研究内容,了解所需的相关知识与技能。
第03-04周:确定方案,翻译英文文献,完成开题报告。
第04-10周:制定系统总体架构,设计其功能模块,搭建实验(仿真)平台。
4. 参考文献(12篇以上)
[1] 薛钧义,张彦斌.凌阳十六位单片机原理及应用[m] .北京:北京航空航天大学出版社,2003
[2] 孔祥洪,孟健.凌阳十六位单片机原理及应用[m].北京航空航天大学出版社,2009
[3] 张培仁,张志坚,高修峰.十六位单片机微处理器原理及应用[m].清华大学出版社,2007



