固定翼无人机进场前位姿的视觉估计方法开题报告
2020-04-13 15:53:29
1. 研究目的与意义(文献综述)
1目的及意义
1.1位姿检测的重要性
无人机是一种不搭载飞行员,依靠机载自动飞行驾驶系统进行控制的飞行器。近年来,无人机自主着陆成为研究热点,要实现无人机的自主、稳定着陆,必须保证无人机在进场阶段能以一个准确的姿态对准跑道。为了实现这一点,必须要具备检测无人机位姿的能力。因此,无人机的位姿检测至关重要。
2. 研究的基本内容与方案
2研究内容与技术方案
2.1研究内容
无人机的位姿主要包括俯仰角、滚转角、偏航角、飞行高度和相对跑道中线的侧偏距离等几个参数。要实现对以上参数的准确估计,需要完成以下研究内容:
(1)模拟无人机的进场场景,建立几何数学模型。
(2)结合数学模型,设计无人机位姿的获取方法。
(3)根据位姿获取方法,运用计算机视觉相关技术提取所需数据信息。
(4)实验或仿真研究与分析。
2.2 技术方案
2.2.1几何数学模型建立
在机器视觉中,摄像机通过成像透镜将真实世界中的三维场景投影到摄像机二维像平面上,像平面中像素点的位置和真实世界中空间点位置的关系可以通过光学成像几何关系来确定,即摄像机成像模型。摄像机成像模型分为线性模型和非线性模型,在视觉系统中比较通用的是前者,又称为针孔成像模型[46](pin-hole model),如图2.2所示。
| | |
| | 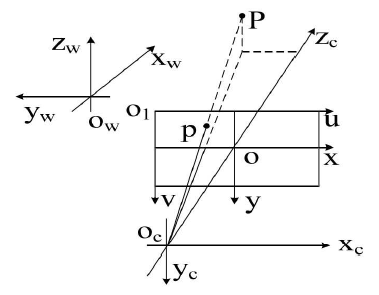 |
图2.1中涉及四种坐标系,它们分别是:
(1)世界坐标系(![]() ):为了确定摄像机的位置,需要在三维环境中选择一个基准坐标系,该坐标系称为世界坐标系。针对本研究情形,世界坐标系建立在跑道的中心线上;
):为了确定摄像机的位置,需要在三维环境中选择一个基准坐标系,该坐标系称为世界坐标系。针对本研究情形,世界坐标系建立在跑道的中心线上;![]() 轴垂直地面向上;
轴垂直地面向上;![]() 轴沿跑道中心线方向 ;
轴沿跑道中心线方向 ;![]() 轴在地平面内垂直
轴在地平面内垂直 ![]() 轴指向左方。
轴指向左方。
(2)摄像机机体坐标系(![]() ):该坐标系原点称为摄像机光心,摄像机光心到图像平面的垂线
):该坐标系原点称为摄像机光心,摄像机光心到图像平面的垂线![]() 为摄像机光轴;本研究过程中假设摄像机被固联在无人机前方,用这一坐标系来代替无人机机体坐标系。
为摄像机光轴;本研究过程中假设摄像机被固联在无人机前方,用这一坐标系来代替无人机机体坐标系。
(3)图像物理坐标系(![]() ):摄像机光轴
):摄像机光轴![]() 与图像平面的交点o称为主点,主点和光心之间的距离称为摄像机的焦距f。
与图像平面的交点o称为主点,主点和光心之间的距离称为摄像机的焦距f。![]() ,
,![]() 分别平行于
分别平行于![]() ,
,![]() 。空间中任一点P在图像平面的成像位置p由中心射影关系确定。
。空间中任一点P在图像平面的成像位置p由中心射影关系确定。
(4)图像像素坐标系(![]() ):图像像素坐标系相当于在考虑了像素点大小后,将图像物理坐标系水平、垂直拉伸后得到,图像物理坐标系的主点o在该坐标系下的坐标为(
):图像像素坐标系相当于在考虑了像素点大小后,将图像物理坐标系水平、垂直拉伸后得到,图像物理坐标系的主点o在该坐标系下的坐标为( ),图像像素坐标系与图像物理坐标系存在如下关系:
),图像像素坐标系与图像物理坐标系存在如下关系:
![]()
四种坐标系之间存在紧密的联系,每两种坐标系中的点都可以通过相应的矩阵变换进行转换,这种转换关系也是获取位姿参数的关键。
2.2.2位姿参数获取方法
通过分析无人机在不同姿态下,各坐标系之间的几何关系,大致可以得出无人机的相关姿态参数可由以下方法获取:
(1)滚转角:即图像物理坐标系内地平线与oX轴的夹角。
(2)俯仰角:取决于图像物理坐标系内地平线与X轴的距离。
(3)偏航角:结合像素坐标系内两条跑道边缘线的交点以及求解得到的滚转角和俯仰角,利用数学关系求解。
(4)侧偏距离:在得出三个姿态角后,根据坐标系变换关系,求解矩阵得出。
2.2.3图像信息提取
通过机载传感器获得的图像数据实际上是图像像素坐标系下的信息,结合2.2.1中已知的各个坐标系的变换关系,可以求解出空间中任一点在任意坐标系下的点坐标。由2.2.2节的分析可知,为了获取无人机位姿参数,最为关键的是要得出地平线和两条跑道边缘线的相关信息,因此我们需要提取这三条特征直线在像素坐标系下的方程。
提取直线方程的过程中,由于图像信息中存在一定的噪声信号,首先需要采用图像滤波对其进行降噪;其次,根据三条特征直线极强的边缘特征,对其进行边缘检测;然后,使用Hough变换对边缘检测后多余的边缘点进行滤除,使图像中仅留下三条特征直线;最后,利用最小二乘法得出三条特征直线的数学方程。
2.2.4 实验
完成理论阶段的设计后,搭建实验平台以实现研究内容。采用操场跑道等环境模拟无人机进场情形,并获取相应的图像数据。实验过程中,可以结合陀螺仪、加速度计等惯性导航器件,对视觉方法下获得的数据进行矫正与分析。
3. 研究计划与安排
3进度安排
(1)第1-3周:查阅相关文献资料,明确研究内容,了解研究所需基本原理及技术方法。确定方案,完成开题报告。
(2)第4-6周:学习数字图像处理和计算机视觉相关理论,掌握相应计算机视觉库的基本内容和使用方法。
4. 参考文献(12篇以上)
参考文献
[1]秦博,王蕾.无人机发展综述[j].飞行导弹,2002,(8):4~10.
[2]朱家海.惯性导航[m].北京:国防工业出版社,2008,9:51~122.



