prescan的速度规划设计与仿真毕业论文
2021-12-06 20:45:18
论文总字数:27481字
摘 要
随着科技的发展和城市化进程的不断推进,自动驾驶技术近年来成为汽车领域内研究的重点方向,目前的自动驾驶技术可以分为感知、决策、规划控制三个部分,规划控制既是自动驾驶的基础,也是保证车辆行驶安全性的关键所在。速度规划控制属于规划控制的重要组成部分,是自动驾驶技术的基础。因此研究速度规划控制有着重要的研究意义,Prescan是一款虚拟交通场景搭建软件,可以通过虚拟的交通场景进行自动驾驶相关算法的仿真验证,可以大大缩短测试成本及周期。
本文基于几种常见的交通场景,设计了基于拥堵交通场景和城市道路场景的速度规划算法,按照规划路径完成对车辆的车速规划和控制。并在Prescan中搭建了虚拟交通场景。完成对速度规划算法的仿真验证。主要进行了以下研究工作:
首先对于常见的交通场景进行了分析,对于速度规划器的总体结构、功能划分和各部分切换策略进行了设计。其次,对于拥堵跟车场景、城市道路场景进行了速度规划设计:基于可变车头时距的安全距离设计了跟车控制算法,基于车辆动力学和交通法规设计了城市场景速度规划策略,并设计了基于逆查询表的速度跟踪控制算法。并在simulink中建立了对应的模型。
最后,在Prescan中搭建了包含拥堵跟车、十字路口等工况的虚拟交通场景,并在Carsim中建立了车辆动力学模型,进行了Prescan、Carsim和simulink的联合仿真,验证了所设计的速度规划控制器的可靠性。
关键词:速度规划控制;Prescan;MATLAB/simulink;可变安全距离
Abstract
With the development of science and technology and the advancement of urbanization, self-driving technology in recent years become the focus of research in auto area direction, the automatic driving technology can be divided into perception, decision-making, planning and control of three parts, planning and control is not only the foundation of automatic driving, also is the key to ensure traffic safety. Speed planning control is an important part of planning control, which is the basis of automatic driving technology. Therefore, it is of great research significance to study speed planning and control. Prescan is a virtual traffic scene construction software, which can conduct simulation verification of autopilot related algorithms through virtual traffic scenes, and can greatly reduce the test cost and cycle.
Based on several common traffic scenarios, this paper designs a speed planning algorithm based on congestion traffic scenarios and urban road scenarios, and completes the vehicle speed planning and control according to the planning path. The virtual traffic scene was built in Prescan. The simulation of velocity planning algorithm is completed. Mainly conducted the following research work:
Firstly, the common traffic scenarios are analyzed, and the overall structure, function division and switching strategy of each part of the speed planner are designed. Secondly, speed planning and design are carried out for the following scenarios: vehicle following control algorithm is designed based on the safe distance of variable time headway; urban scene speed planning strategy is designed based on vehicle dynamics and traffic laws; and speed tracking control algorithm based on the reverse query table is designed. The corresponding model was built in simulink.
Finally, a virtual traffic scene was built in Prescan, including congestion following cars, intersections and other working conditions, and a vehicle dynamics model was built in Carsim. Prescan, Carsim and simulink were co-simulated to verify the reliability of the designed speed planning controller.
Key Words:Speed planning control;Prescan;MATLAB/Simulink;Variable safe distance
目 录
第1章 绪论 1
1.1 课题背景及意义 1
1.2 速度规划控制研究现状 1
1.3 模型在环测试方法与Prescan软件简介 2
1.4 本文主要研究内容 3
第2章 速度规划控制器控制结构设计 4
2.1 速度规划控制整体架构设计 4
2.2 控制器模式切换策略 5
2.3 本章小结 5
第3章 拥堵跟车场景下的速度规划控制设计 6
3.1 跟车模块算法设计 6
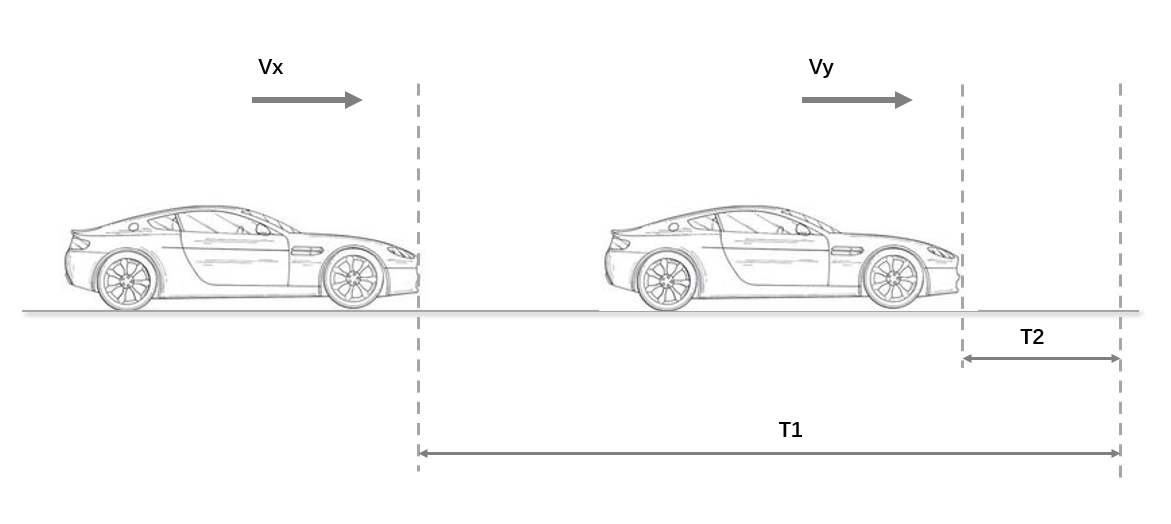
3.1.1 安全距离模型设计 6
3.1.2 线性跟车算法设计 8
3.2 基于逆查表法的速度跟踪控制器设计 8
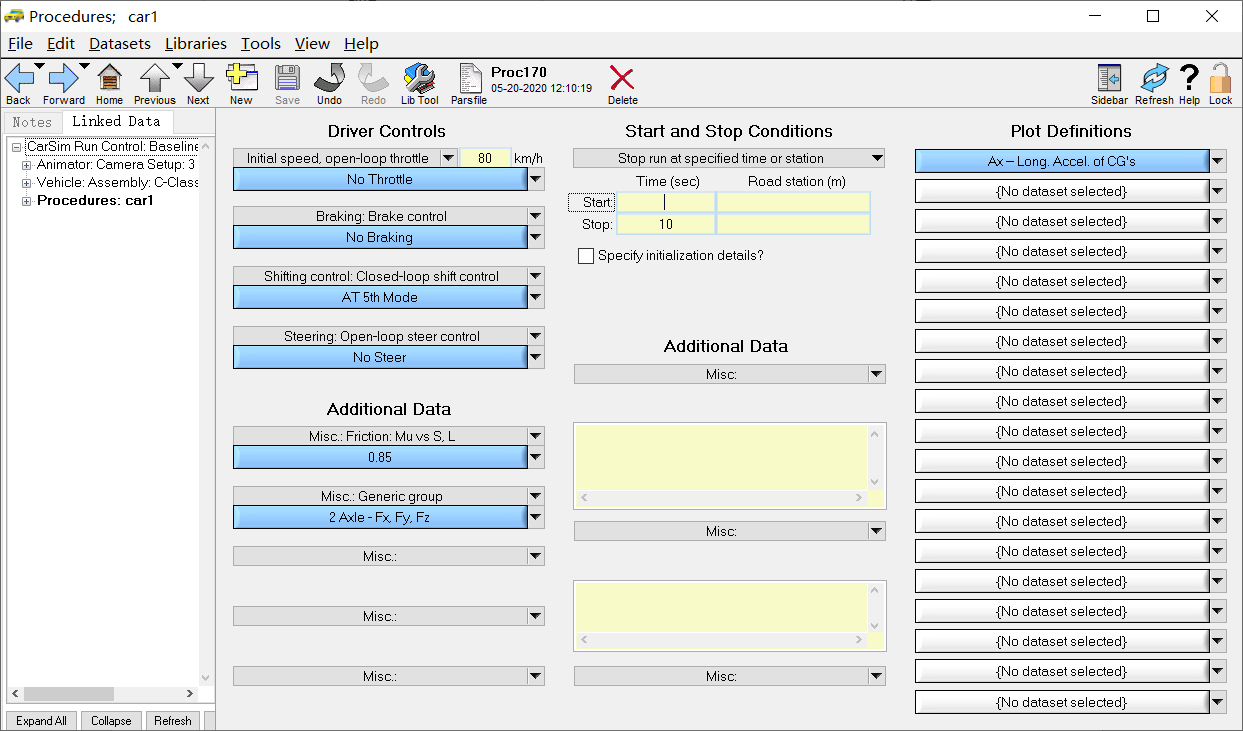
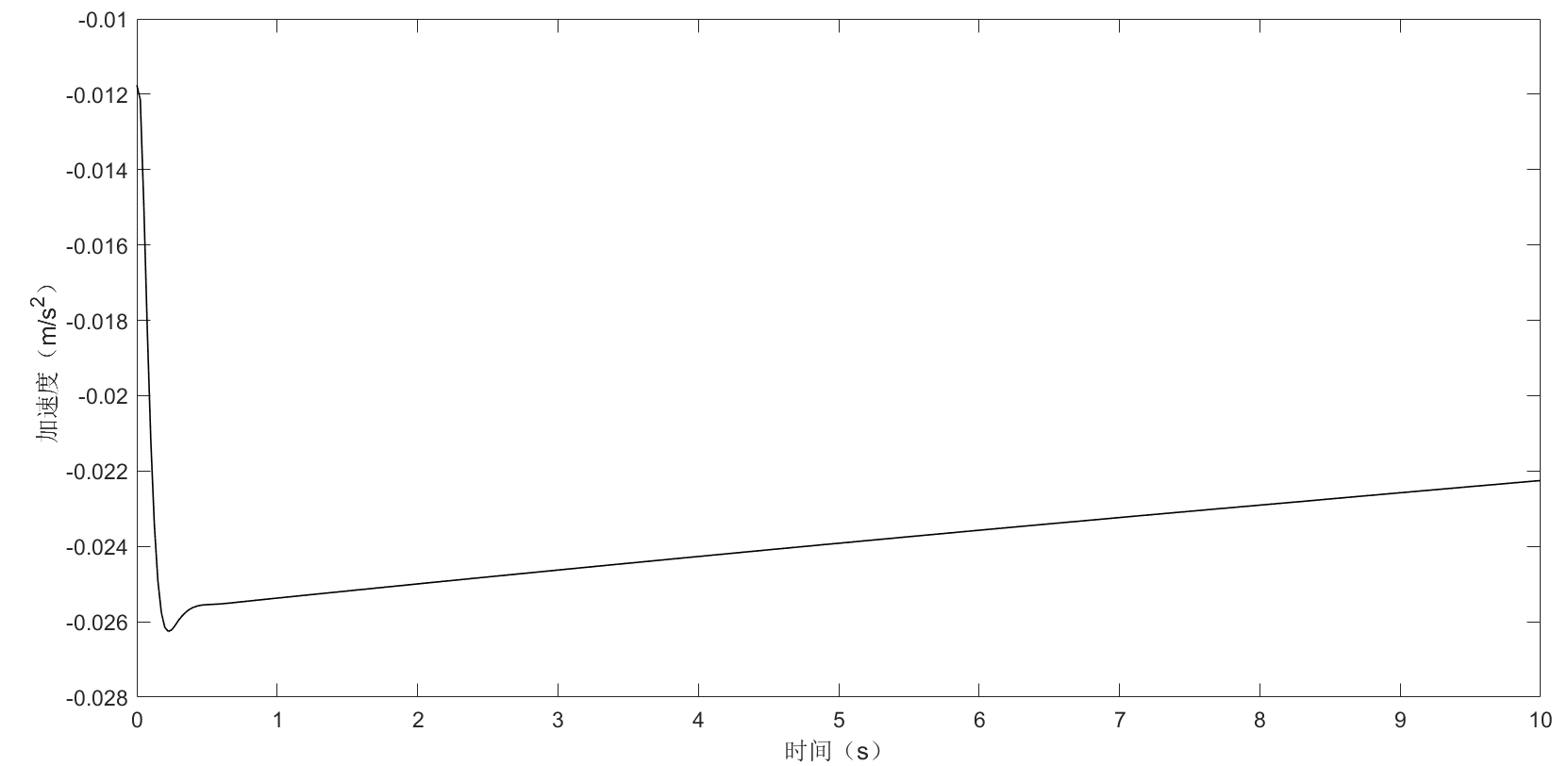
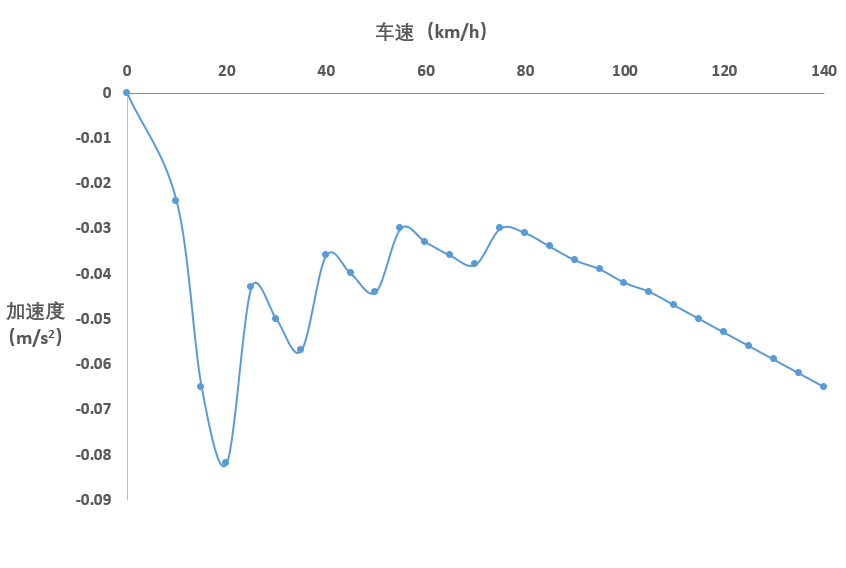
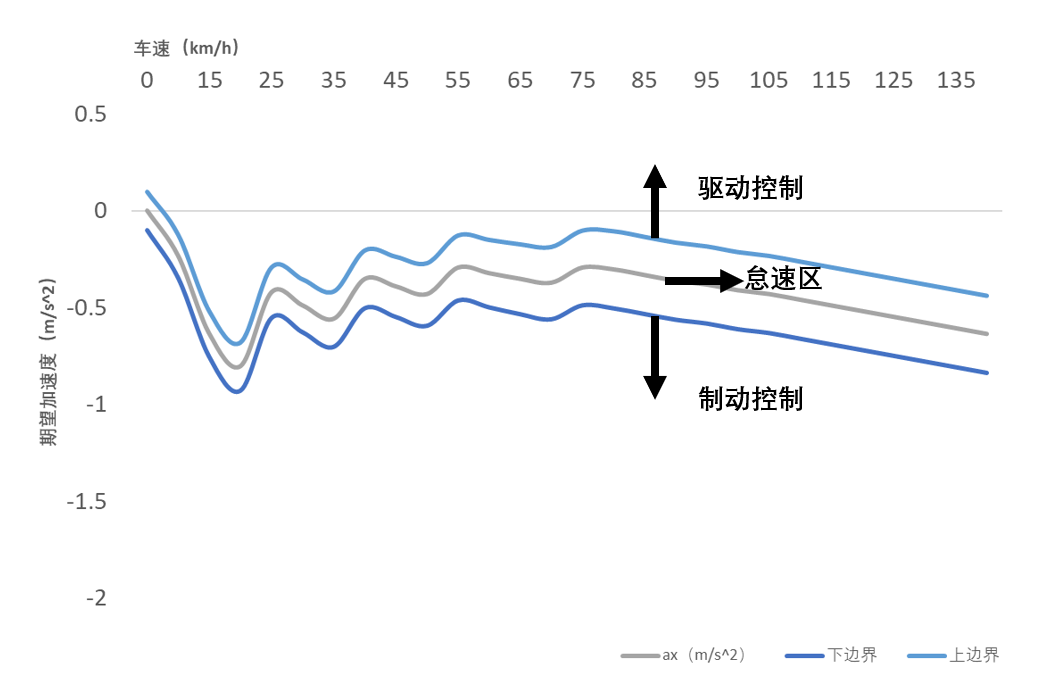
3.2.1 怠速滑行实验曲线标定及模式切换策略 9
3.2.2 车速-加速度-节气门开度逆查表 11
3.2.3 车速-制动减速度-制动压力逆查表 13
3.3 跟车控制模块simulink模型搭建 15
3.4 本章小结 17
第4章 基于城市场景的车速规划设计 19
4.1 基于路径信息的速度规划设计 19
4.2 基于交通信号灯的速度规划设计 21
4.3 控制器simulink模型搭建 22
4.4 本章小结 24
第5章 基于Prescan、Carsim/Simulink的联合仿真实验验证 25
5.1 基于Prescan的虚拟交通场景及传感器模型搭建 25
5.1.1 道路交通环境搭建 26
5.1.2 典型工况场景搭建 26
5.1.3 车辆传感器模型的配置及信号前处理 27
5.2 基于Carsim的车辆动力学模型设置 29
5.3 联合仿真模型搭建和设置 29
5.4 仿真结果分析 31
5.5 本章小结 32
第6章 总结与展望 33
6.1 工作总结 33
6.2 未来展望 33
参考文献 34
致 谢 36
第1章 绪论
- 课题背景及意义
随着当前城市化进程的不断推进,城市人口越发密集。工业生产技术不断发展,我国的汽车保有量也在不断增加,这在方便了人们的出行的同时,也带来了交通拥堵、交通事故频发等亟待解决的问题。自动驾驶技术与20世纪80年代被提出,在近些年得到了长足的发展,并出现实用化的趋势,自动驾驶汽车依靠视觉计算、雷达传感器和GPS系统协同合作,能够由计算机系统在驾驶员没有任何操作的前提下控制车辆运动,可以有效地解决道路利用率低等问题,从而改善交通拥堵情况、降低交通事故发生率[1]。各大汽车企业和零部件企业也在不断加大对于自动驾驶技术研发的投入,其在未来有着巨大的发展空间和广阔的应用前景。
目前的自动驾驶技术的大致由感知、决策、规划控制三个部分组成[2],感知是利用多传感器融合技术完成对车辆自身状态、周边环境的信息采集;决策是根据感知数据进行情景认知并做出驾驶行为决策;规划控制是在决策后基于传感器提供的环境数据和自身数据进行实时的路径规划和速度规划,并精确控制车辆的运动,自动驾驶技术的核心之一。
速度的规划控制是规划控制部分的重要部分,通常根据周边环境和自身状态进行车速规划,以保证车辆在交通规则限制和自车安全的条件下,能够平顺地完成对规划路径的循迹跟踪,速度控制是基于车辆自身参数对规划车速进行跟踪,保证车辆以规划车速行驶。速度规划控制是保证路径跟踪效果的关键。也对保证车辆行驶安全性和平顺性有重要意义。
- 速度规划控制研究现状
对速度规划控制问题国内外学者已经进行了大量的研究,1960 年代,Diamond和Lawrence[3]首次提出通过自动控制被控车辆的速度,提高行车安全性和道路通行率。但受技术发展的限制,其学说只停留在理论层面,随着技术的发展,尤其近几年是传感器和计算机技术的发展,速度控制得以发展,其方向大致分为两类:
第一个是控制算法上的优化,如Jianjun Hu[4]采用基于三自由度车辆模型的模型预测算法对车辆自动循迹控制进行了优化。该模型可以有效的提高系统的稳定性和抗干扰能力,但预测模型建立较为复杂,结果准确性与模型关联度较高[5]。朱晓宏[6]采用模糊控制方法设计了定速巡航控制器,采用自适应模糊神经网络优化了跟车间距控制器。该方法综合两种算法,有效的避免了模糊控制隶属函数过于依靠经验确定的缺点。段建民[7]提出了一种基于中间速度的梯形速度规划方法,实现车速提前规划,其相较于其他方法较为简单易行,但其边界条件为最高车速和最大加减速度,但并未考虑纵向平顺性的影响,导致舒适性降低。
第二个方面是间距策略的研究,安全间距选取对于速度规划的安全性有着重要作用,安全间距分为固定间距和可变间距两种,固定间距是根据自车参数设置固定安全距离,模型简单,易于实现,但准确度不高,安全性差,故目前都以可变安全距离为主,如Gao Zhenhai[8]等人提出的间距策略为先通过传感器获取两车相对速度和实际距离,再根据自车行驶状态采用模糊分析输出安全距离。董洁[9]采用基于车间距保持的安全距离模型、反映驾驶员特点的安全距离模型、车辆换道时纵向安全距离模型三种模型以及两种边界条件建立了耦合安全距离模型,并通过Matlab/Simulink与Carsim的联合仿真进行了验证。
- 模型在环测试方法与Prescan软件简介
模型在环测试是指用模型驱动进行嵌入式系统开发时,在开发阶段初期及建模阶段中对于控制模型进行仿真测试的方法,是V型开发流程中不可缺少的一个部分,其结构大致如图,需要外部输入、控制模型和被控对象模型,即合适的车辆动力学模型,由于其只需要控制模型,而不需要将控制算法集成编码,所以其相较于软件在环和硬件在环测试有成本低、周期短、复用性强等优点[10]-[11],可以高效的检验控制算法的可行性。
请支付后下载全文,论文总字数:27481字
相关图片展示: