基于prescan的交通场景设计及数据采集毕业论文
2021-12-06 20:45:32
论文总字数:25374字
摘 要
随着无人驾驶、智能汽车、汽车ADAS等领域的技术研究不断深入以及计算机辅助研究软件的不断发展,研究人员对于一个可靠、便捷、高效的辅助研究平台的需求越发强烈。在研究这些相关技术时,通常需要搭建虚拟的交通场景,为虚拟车辆配置相关的传感器和控制算法等从而实现虚拟仿真的目的。PreScan由于在场景仿真方面具有优越性,得到广泛采用。
本文首先通过对PreScan仿真平台的研究学习,了解该仿真平台的基本操作和功能,熟悉交通场景搭建的主要方法和一般步骤,为搭建虚拟交通场景打下基础。
接着查阅交通场景设计相关文献,利用所学软件相关操作知识,基于PreScan平台设计和建立十字路口、匝道和环岛三种工况下的交通场景,为场景中的虚拟车辆设置一定的行驶轨迹和运动学参数,使所搭建的场景能够满足运行条件,为后续联合仿真打下基础。
最后,从了解PreScan提供的传感器入手,将其配置于场景的虚拟车辆中,选取搭建的典型场景进行PreScan/Simulink联合仿真。得到仿真输出结果后,对其进行分析总结,并提出优化方案。
此外,在查阅相关文献后,对基于PXI的驾驶模拟器及数据采集使用流程进行了解。
通过利用PreScan这一工具搭建交通场景,为无人驾驶、智能汽车、汽车ADAS等领域的技术研究工作提供表层支撑,达到了更便捷、更高效开展研究工作之目的,在该领域的研究中具有很强的应用参考意义。
关键词:PresCan;交通场景;联合仿真
Abstract
With the continuous deepening of technical research in the fields of unmanned driving, smart cars, automotive ADAS, and the continuous development of computer-aided research software, researchers' demands for a reliable, convenient, and efficient auxiliary research platform are becoming stronger. When researching these related technologies, it is usually necessary to build virtual traffic scenarios, configure relevant sensors and control algorithms for virtual vehicles, etc. to achieve the purpose of virtual simulation. PreScan is widely used because of its superiority in scenario simulation.
In this paper, we firstly learn the basic operation and function of the PreScan simulation platform through literature, familiarizes with the main methods and general steps of traffic scenario construction, and lays the foundation for the construction of virtual traffic scenarios.
Then refer to the relevant literature on traffic scenario design, use the learned operation flow to design and establish traffic scenarios under the three operating conditions of intersection, ramp and roundabout based on the PreScan platform, and set certain driving trajectories and kinematic parameters for the virtual vehicles in the scenario, So that the built scenario can meet the operating conditions, and lay the foundation for the subsequent simulation verification work.
In addition, after consulting the relevant literature, understand the PXI-based driving simulator and data collection and use process.
By using PreScan as a tool to build traffic scenarios, it provides surface support for technical researches such as driverless, smart cars, and automobile ADAS, and achieves more convenient and efficient purposes.
Key Words:PresCan; Traffic Scenario; Co-simulation
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 本毕业设计的设计背景及意义 1
1.2 PreScan软件应用现状 1
1.2.1 整车在环仿真在自动驾驶智能汽车领域的应用现状 1
1.2.2 PreScan软件平台在自动驾驶智能汽车领域的应用现状 2
1.3 本毕业设计的主要内容 4
1.3.1 本课题的设计内容 4
1.3.2 本设计的重点和难点 5
第2章 基于PreScan平台的交通场景设计 6
2.1 十字路口交通场景的设计 6
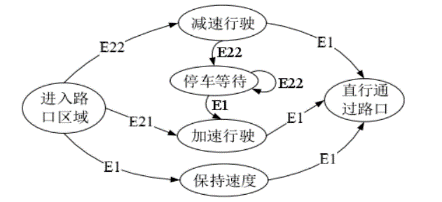
2.1.1 十字路口常见设置形式及交通特点 6
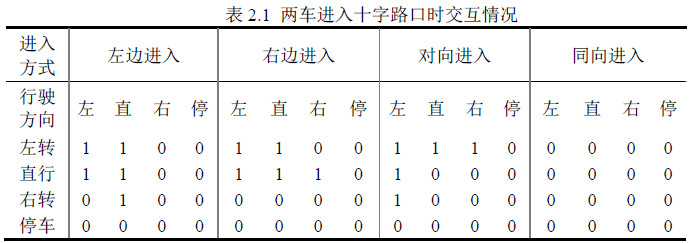
2.1.2 十字路口交通场景设计依据 7
2.1.3 十字路口交通场景的设计过程及搭建成果 9
2.2 匝道交通场景的设计 13
2.2.1 匝道常见设置形式及交通特点 13
2.2.2 匝道交通场景的设计依据 14
2.2.3 匝道交通场景的设计过程及搭建成果 15
2.3 环岛交通场景的设计 18
2.3.1 环岛常见设置形式及交通特点 18
2.3.2 环岛交通场景设计依据 19
2.3.3 环岛交通场景的设计过程及搭建成果 19
第3章 PreScan与Simulink的联合仿真 22
3.1 PreScan与Simulink的联合仿真概要 22
3.1.1 联合仿真一般流程 22
3.1.2 PreScan常用传感器介绍 23
3.1.3 仿真相关参数设置 24
3.2 仿真输出结果及其分析 24
3.2.1 基于点云传感器的车辆周围环境识别 24
3.2.2 基于车道识别传感器的行车参数输出 30
3.2.3 基于物体传感器的行人及车辆识别 34
第4章 基于PXI的驾驶模拟器概述 36
4.1 基于PXI的驾驶模拟器简介 36
4.2 基于PXI驾驶模拟器的数据采集试验思路 37
第5章 结论 39
致 谢 40
参考文献 41
第1章 绪论
1.1 本毕业设计的设计背景及意义
本毕业设计的设计背景如下。
近年来,随着自动驾驶和智能汽车等领域研究工作的深入,以及计算机辅助软件的发展,研究人员开始广泛利用计算机软件对相应的假设进行仿真实验验证。对国内外研究现状进行简要分析后可知,PreScan软件作为一个可快速建立车辆行驶的模拟交通场景的软件平台,受到了许多研究人员的青睐。
本毕业设计的意义主要有如下几个方面。
(1)通过熟悉PreScan软件的交通场景建模流程,学习PreScan软件的主要功能和基本的使用方法,体会研究自动驾驶智能汽车先进技术时在表层建模工作中的主要思路和流程。
(2)通过设计十字路口、匝道和环岛工况的三个典型场景,体会智能汽车先进技术体系中一些具有代表性的技术(如ACC、LWDS等)在不同的道路交通状况中是如何起作用的,以及要建立怎么样的场景来对这些技术进行可行性验证和算法优化等研究工作。
(3)初步掌握PreScan和Simulink联合仿真的方法,了解基于PXI的驾驶模拟器及数据采集使用流程,为今后从事相关的工作和研究打下基础。
1.2 PreScan软件应用现状
1.2.1 整车在环仿真在自动驾驶智能汽车领域的应用现状
整车在环(Vehicle-in-the-Loop, VIL)仿真隶属于硬件在环(Hardware-in-the-Loop, HIL)仿真,是HIL的一种特殊类型。VIL的工作原理是,通过将自动驾驶系统集成到实际车辆中并在实验室条件下构建模拟的道路,交通场景和环境因素,可以系统地实施基于多场景的自动驾驶汽车功能和性能测试。一直以来,研究人员对整车在环仿真系统进行着广泛而深入的研究。赵祥模[1]等人参考前人研究的经验,研发了采用基于C/S系统架构的由试验台测控子系统、前轴可旋转式转鼓试验台、虚拟传感器模拟子系统、虚拟场景自动生成子系统、汽车驾驶模拟器、自动驾驶汽车和测试结果自动分析评价子系统等七个子系统组成的基于整车在环仿真的自动驾驶汽车室内快速测试平台。团队利用该平台实现汽车不同工况模拟、实现整车性能测试,同时也验证了该室内快速测试平台的有效性。马志成[2]等通过分析主流整车测试方法的特点,充分结合诸方法的优势,提出了搭建自动驾驶VIL仿真测试平台。利用该平台能够实时监测车辆多种信号的功能,在实际场景仿真中特别是测试后期的数据处理、算法改进、故障分析等工作具有关键作用。
1.2.2 PreScan软件平台在自动驾驶智能汽车领域的应用现状
PreScan软件是由荷兰TNO公司开发的一款能够高效搭建车辆行驶交通模拟场景(可包括天气状况、建筑物、车辆及其动力学、交通参与者、道路部件、传感器等)的仿真软件,当前在行业内处于全球领先水平。如图1.1和图1.2所示,PreScan主要由GUI界面和VisViewer组成,人机交互十分友好,在GUI界面中可以搭建道路、建筑物和车辆行人等交通参与者,每种元素提供大量参数进行自由设置,搭建好的场景可在VisViewer中直接预览三维效果,具有很大的便利性和直观性。利用PreScan可以很方便地与Matlab Simulink、Carsim等各种仿真软件进行通讯以实现联合仿真,也可以和LabVIEW和dSPACE等开发环境共同实现HIL硬件在环仿真,在研究自动驾驶、智能汽车、ADAS等领域充当着方便、高效、实用的研究工具,为研究人员创造了巨大的应用价值和丰富的科研成果。
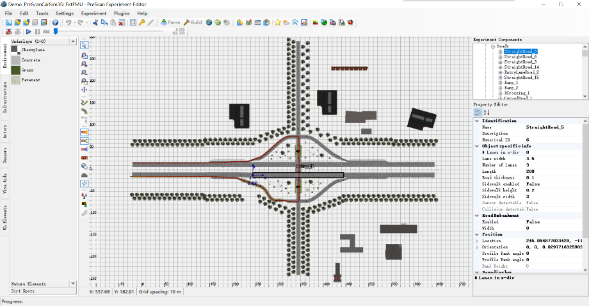
图1.1 PreScan软件GUI界面
PreScan软件平台在自动驾驶智能汽车领域正得到广泛而深入的应用。胡延平[3]等在PreScan软件中搭建十字路口和三岔路口的场景,并在Simulink中建立算法模型进行PreScan/Simulink联合仿真,最后通过实验室实车试验平台进行基于实车的X型交叉轨迹AEB实验,对特定工况的AEB算法进行验证。张云龙[4]等在研究智能汽车车道偏离预警系统(LDWS)时,提出了LDWS在面对不同工况下的的控制策略。使用PreScan平台搭建车道偏离预警测试场景、并给测试车辆添加动力学模型和视觉传感器后,通过Simulink平台的仿真结果验证得出LDWS可以满足危险工况下预警的要求。贺勇[5]等利用PreScan建立道路跟随和前方障碍物检测的场景,实现简单的自动驾驶场景的仿真。根据在此场景下的仿真,得出了体现车辆行驶在对应车道时的速度图和方向图。严尉剑[6]等利用PreScan进行场景搭建,给车辆配置GPS、目标跟踪摄像头、毫米波测距雷达等传感器,通过仿真实验验证了IMM算法在路面机动车辆跟踪过程的有效性、实时性和精确性。江丽君[7]等针对同一工况下不同运动状态导致的场景数量多的问题,研究了参数化场景快速建模的方法,实现只需输入特定的变量就可通过参数库生成符合试验工况要求的场景模型,并可在PreScan中输出。舒红[8]等面对复杂、无限的道路交通场景,利用组合推理的测试场景构建方法和场景筛选规则,最终生成满足测试条件的有价值的场景,从而便于进行相关试验。Hoel[9]等介绍了自动驾驶战术决策的一般框架,以蒙特卡罗树搜索和深度强化学习的形式将规划和学习相结合。为说明这一训练有素的决策框架,建立高速公路出口匝道场景,在没有其他车辆的时候和接近出口时,体现自车针对不同状态采取的学习价值和行动。Wang Chia-Sui[10]等使用PreScan进行场景搭建来模拟汽车在道路上的行驶情况,以测试车辆传感器,与过去的测试中大多使用真实车辆会带来较大风险和昂贵成本的缺点相比,不仅可以提供几乎真实的物理数据来获得可靠的信息,而且可以避免使用真实车辆进行测试所带来的风险和巨额成本。Devaragudi[11]等利用PreScan进行交通场景建模,探索了使用在环模型测试开发高级驾驶员辅助系统算法和车辆控制器的新方法,使用提供的MPC控制器演示了障碍物检测和避免碰撞。Miao Qiang[12]等利用PreScan的仿真结果,对系统架构、控制策略和主要设计参数进行了优化,得出使用PreScan开发主动安全系统是可行、高效、低成本的。Hu Xiong[13]等在利用PreScan建立场景进行仿真的基础上,验证了所提出的具有两级警告和两级制动强度的防撞策略可以完全避免碰撞或减轻碰撞的严重性。
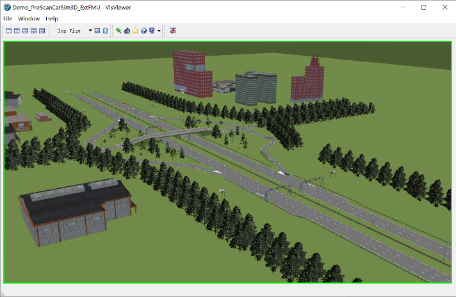
图1.2 PreScan软件VisViewer界面
总的来说,国内外研究人员广泛利用基于PreScan的交通场景来对各项汽车ADAS技术、自动驾驶汽车和智能汽车等进行研究。这主要是因为利用计算机进行仿真,具有节约科研成本、提高实验的安全性、实验结果与实测结果误差小等优势。现已形成一条较为合理且相对固定的研究思路,即首先根据研究对象提出相应的假设(如某项控制策略、某种算法),然后搭建相应交通场景,输入设定的工况与算法参数,联合Simulink等仿真软件进行仿真验证,进而能够验证假设的合理性、正确性,并可对既有控制策略或算法进行优化。在此过程中,基于PreScan的场景搭建作为关键的一环,起着重要作用。同时,为了能建立与真实状况一致性较高的交通场景,研究人员也对大量自然驾驶数据进行了分析和总结。
请支付后下载全文,论文总字数:25374字
相关图片展示: