非线性规划问题:一维最小化方法外文翻译资料
2022-08-31 17:13:20
英语原文共 53 页,剩余内容已隐藏,支付完成后下载完整资料
非线性规划问题:一维最小化方法
5.1引言
在第2章,我们看到,如果关于目标函数的表达式和约束在设计变量方面非常简单,那么可以使用优化的传统方法来解决这个问题。另一方面,如果该优化问题涉及的目标函数和/或约束未说明作为设计变量或它们太复杂而不好处理,我们可以不通过使用经典分析方法解决这个问题。下面的例子是用来说明其中约束不能作为设计变量的显函数的情况。例5.2示出了目标函数是一个复杂的量的情况下优化这个经典方法就不是很适用了。
例5.1所示的为任何节点位移约束的平面桁架的设计问题,如图5.1所示为最小重量的主体,其无论是在垂直或水平方向,不超过一个值delta;。
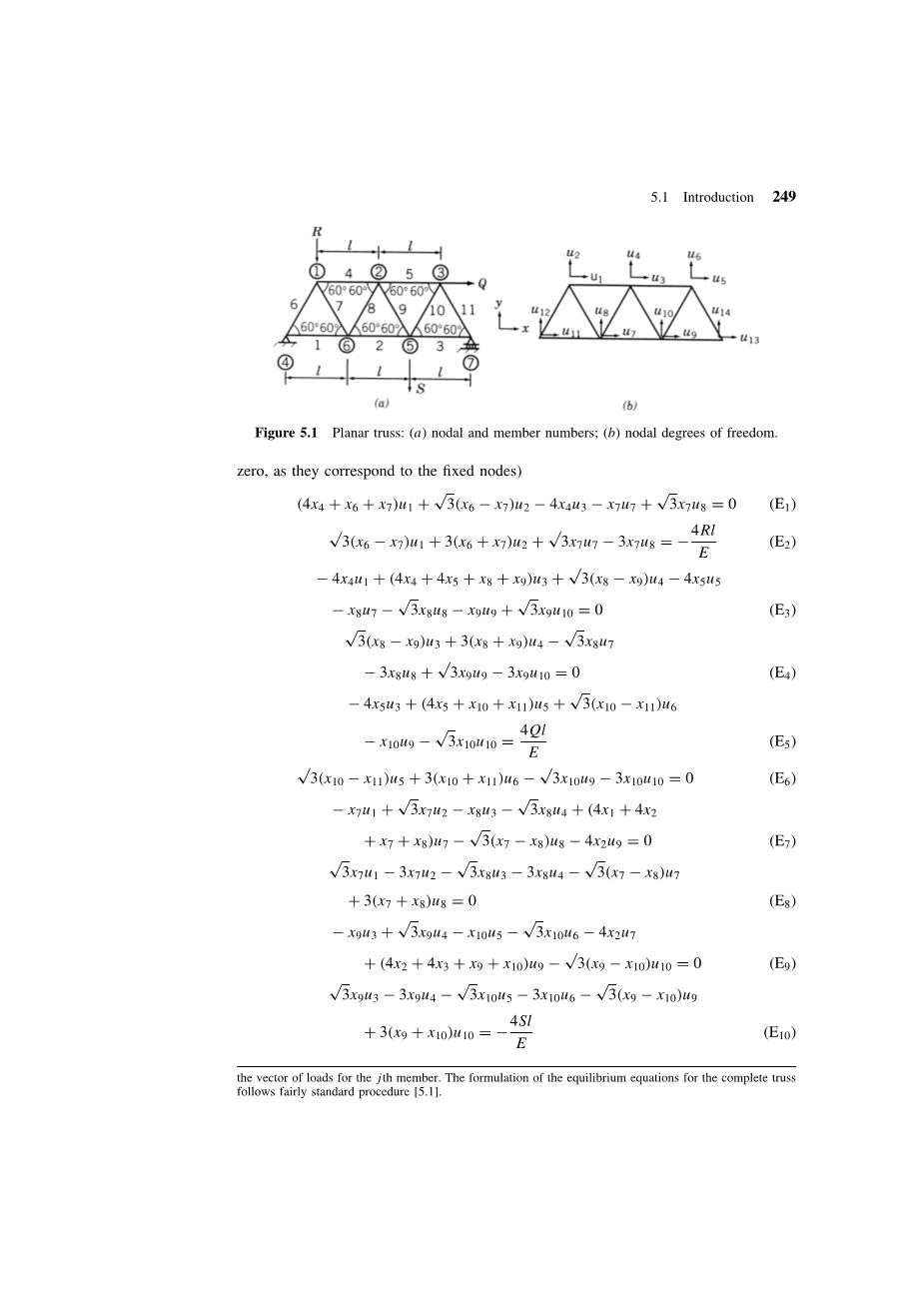
解 把密度rho;和材料的杨氏模量E、构件的长度L,与外载荷Q,R,S设为设计数据。对应的A1,A2,hellip;A11区域分别作为设计变量X1,X2,hellip;,X11。通过平衡方程可以推导出的未知节点位移U1,U2,hellip;,U10为dagger;(位移U11,U12、U13、和U14为零,因为它们对应的是固定节点)
(式1)
(式2)
(式3)
(式4)
(式5)
(式6)
(式7)
(式8)
(式9)
(式10)
dagger;根据结构分析的矩阵方法,由[ 5.1 ]给出的第j个点的平衡方程是
刚度矩阵可以表示为
- 其中theta;J是相对于X轴的第j个点的倾向,Aj是两构件的横截面积,Lj是第j个点的长度、Uj是位移向量的第j个点,而且Pj是荷载向量的第j个点。完整的桁架的平衡方程的制定应遵循相对应标准程序[ 5.1 ]。
图5.1平面桁架:(a)节点和个数;(b)节点自由度。
值得注意的是,数量越来越多的位移方程式是不能用一个显式的封闭形式求解出来的。然而,给出的向量X,EQS系统。(E1)到(E10)是可以被求解出数值从而得到节点位移U1,U2,hellip;,U10。
优化问题可以表述如下:
(式11)
其约束为
(式12)
(式13)
这个问题的目标函数是设计变量在方程(E11)给出的一个简单函数。约束,虽然由抽象表达可以写成Gj(x),不能写成X。然而给出的向量X,我们可以计算出Gj(x)的数值。许多工程设计问题具有这种特性(即,目标和/或约束不能写明确的设计变量)。在这种情况下,我们需要使用数值计算方法来优化解决方案。
例5.2 所给的两个相互接触的小球在沿z轴方向的剪切应力为
(式1)
其中a是接触面积半径,pmax是在接触区中心的最大压力(图5.2):
(式2)
(式3)
其中F是接触力,E1和E2是两球体的杨氏模量,nu;1和nu;2是两球的泊松比,D1和D2是两个球体的直径。在许多实际应用中,如球轴承,其接触载荷(F-)是很大的,裂纹源于最大剪应力的点然后传播到表面,导致疲劳破坏。找到一个裂缝的起源,找到其剪应力最大值的点是很有必要的。因此解决问题就在于找到剪切应力最大值的点,也就是nu; = nu;1 = nu;2 = 0.3。
图5.2双球接触应力
解 因为v1=v2=0.3,代入E1,,E1即可简化为
其中f = tau;zx/pmax and lambda; = z/a。由于E4是一个距离的非线性函数,lambda;,是求解f的最大值的必要条件,df/dlambda; = 0,导致其封闭方程的封闭的解lambda;*是不能被简单的求解出来。在这种情况下,数值优化方法可方便的用于求解lambda;*。
绝大多数的数值优化方法的基本理念是根据下面的方案生成一个优化过的近似的序列:
- 从试验初始点X1开始。
- 确定一个合适的方向Si(从i=1开始),通常意味着最佳方向。
- 找到一个合适的lambda;lowast;沿着Si运动。
- 获得一个新的近似的Xi 1
Xi 1 = Xi lambda;lowast; i Si (5.1)
- 检测Xi 1是否为最佳。如果是,则中止程序。不是,则设新的i=i 1然后重复步骤2。
图5.3优化迭代过程。
通过表示迭代过程(5.1)是有效的约束以及约束优化问题。在图5.3中,该过程是一个假设2个变量的问题。方程(5.1)表明优化方法的有效性取决于lambda;lowast; i和Si的值是否是确定的。找lambda;lowast; i长度的方法将在这章介绍,而Si的求解将在第6和第7章介绍。
如果f(x)是被最小化的目标函数,那么问题就是找到lambda;lowast; i的值,也就是lambda;i,因为lambda;i=lambda;lowast; i那么最小化f(Xi 1) = f(Xi lambda;iSi) = f(lambda;i),因为Xi和Si都是固定值。由于f是因变量,而只有lambda;i一个自变量,这种利用式5.1求lambda;lowast; i的方法称为一维极小化方法。有好几种方法可以解决一维极小化方法,这些经典的方法可参看表5.1。
在第二章中,我们看到了微分学方法的优化是一个分析的方法,是适用于连续2次可微函数。在这种方法中,计算目标函数的数值几乎是过程的最后一步。在确定决策变量的最优值后,计算目标函数的最优值。在优化的数值方法中,相反的程序后,目标函数的值是首先在决策变量的不同组合和结论中发现然后才得出最优解的。消除方法甚至可用于不连续函数的最小化。二次和三次插值方法涉及多项式逼近给定的函数。直接根方法是通过求解根的方法,也可以认为是二次插值。
表5.1 一维最小化方法
分析方法 数值计算方法
(微分法)
排除方法 插值方法
无限制搜索 无需导数(二次) 需导数
穷举搜索二分法 立方
斐波那契数列方法 直接求根
黄金分割法 牛顿
拟牛顿法
割线
5.2单峰函数
单峰函数是一个只有一个峰值(最大值)、谷(最小)在一个给定的时间间隔的函数。因此,一个变量的函数是单峰的话,考虑到变量的两值在优化的同一侧,其接近最佳提供了更好的函数值(即在一个最小化问题的情况下更小的值)。这可以用数学表述如下:
一个单峰函数f(x),如果(i) x1 lt; x2 lt; x*意味着f(x2) lt; f(x1),(ii) x2 gt;x1 gt;x*意味着f(x1) lt; f(x2)其中x*是最小的一个点。
一些单峰函数的例子如图5.4所示。因此一个单峰函数可以不可微分甚至可以不连续。如果一个已知的单峰函数在给定的范围内,其中最小值可以被缩小到所提供的函数值在范围内的两个不同的已知点的区间之内。
图5.4单峰函数
图5.5两实验的首次结果:(a) f1 lt; f2; (b) f1 gt;f2; (c) f1 = f2
例如,考虑的标准的时间间隔[0,1]内,两个函数的值如图5.5所示。有三种可能的结果,即,f1 lt; f2, f1 gt;f2, 或者f1 = f2。如果结果是F1<F2,那么最小值x不是右边的x2。因此区间[x2, 1]可以被舍弃,新的最小值所在的区间则是[0,x2] ,结果如图5.5a。如果f(X1)gt; f(x2),区间[0,x1]可以被舍弃,新的最小值所在的区间则是[0,x1](如图5.5b),然而如果f(x1) = f(x2),区间[0,x1]与[x2, 1]都可被舍弃,新的最小值所在的区间是[x1,x2](如图5.5c)。此外,如果一个原始的实验仍然在新的区间,将在图5.5a和b的情况下,只有一个实验需要被放置在新的区间,过程可重复。在某些情况如图5.5c,两实验是放在新的区间以减少间隔的不确定性。
单峰性的假设是建立在所有的消除技术上的。如果一个函数是多峰的(即有几个波谷和波峰),该函数的范围可以分为几个部分,每个部分的函数作为一个单峰函数。
消除方法
5.3无限制搜索
在大多数实际问题,最佳的解决方案是已知的,在设计变量的限制范围内。在某些情况下,这个范围是未知的,因此,搜索必须对变量的值没有任何限制。
5.3.1固定步长搜索
对于这一问题的最基本的方法是使用一个固定步长并且其移动以一个良好的方向(正或负)从一个初始点出发。所用的步长应足够小且大小与最终设计的精度有关。虽然这种方法是非常简单的,但它在许多情况下并不适用。此方法详见以下步骤:
- 从一个初始点出发,设为x1。
- 令f1 = f(x1)。
- 设步长s,令x2 = x1 s。
-
令f2 =
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[147756],资料为PDF文档或Word文档,PDF文档可免费转换为Word



