基于极值寻找控制CVT传动效率的提高外文翻译资料
2022-09-25 16:48:45

英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于极值寻找控制CVT传动效率的提高
摘要——设计研究了一种车用无级变速器的效率最优控制器。常规的控制器的目的是控制变速器的传动比在规定的范围内,并防止其损坏,但并没有解决效率问题。夹紧力的函数作为足够精确的模型来测量效率是不可用的,而测量效率需要额外的传感器。在本文中,提出了一种能提高效率的控制器。通过做实验得出了夹紧力(输入)与效率或变速比(输出)之间的关系图。这些图显示出了一个极大值,但这个极大值的位置是不确定的。因此,提出了一种求极值的控制器。这个控制器不需要建立模型就能将输入最大化输出。实验结果表明,这种方法是可行的,并且这个控制器优于传统的控制器。通过鲁棒性分析,那些扰动显示都得到了有效处理。
关键词——无级变速器(CVT),实验,极值寻找控制(ESC),非线性系统,鲁棒性。
1.介绍
目前对于汽车的研究主要在于减少排放和降低燃油消耗。例如自动变速器中的无级变速器(CVT)。CVT能实现变速器的传动比在一定范围内连续变化,在改变传动比时不需要切断发动机到车轮的动力传递。此外,CVT能提高传动系的整体效率,因为发动机能在最优工作点工作[1]。本文的重点在于如何提高CVT自身的效率。
CVT包含液力变矩器、倒挡机构、变速装置、驱动系统等。其中变速装置由V型金属带(推式传送带)、主动带轮、从动带轮组成。主从动带轮分别由一轴向固定的锥盘和可轴向移动的锥盘组成。传动比的改变是通过同时调节可移动锥盘上的夹紧力来实现的。主从动轴上的锥盘作轴向移动,改变了带轮的工作半径,从而改变了传动比。尽管存在机电[2]和电液[3]驱动系统,但大多数的CVT是由液压系统来驱动的,本文所研究的也是液压系统。
CVT的主要能量损失来自变速装置和驱动系统[4]-[7]。这些能量损失与夹紧力的大小有着直接的关系。夹紧力必须足够大,以保证能够传递扭矩而不使传送带与带轮之间过度的打滑。当转速很高时,夹紧力减小,传送带与带轮之间的滑动加剧,最终从开环稳定状态(微滑动)过渡到开环不稳定状态(剧烈打滑)。由于夹紧力的减小,变速装置的效率最初增加,随后达到一个最大值,最终减小。这个最大值可以通过做实验来获得[8],它出现在开环稳定状态下[9]。
最近的研究表明,变速装置可以承受相当程度的打滑且其寿命的减少也在可接受的范围内[10]。这个研究让我想到能通过减小夹紧力到一个能传递转矩且打滑程度合适的范围内,来提高传动效率。有一个简单的方法来决定打滑基准[11,例7.2],这个方法确定的打滑基准可以达到最大传动效率[12]。不能通过建立模型来确定一个可用打滑基准,因为变速装置的模型是不可靠的,也不够精确。这让我们选择了另一种方法,这种方法能使变速装置在没有打滑控制的情况下效率最大化。
极值寻求控制(ESC),是一种利用输入-输出图中存在的最大值的控制方法,可参考[13,例13.3]和[14]。其中,这个最大值是通过改变输入(夹紧力)得到最大输出(效率)而得到的。通常,带轮上的转矩无法测量,因此确定效率和控制夹紧力的操作不能使效率最大化。从实验中可以知道夹紧力-速比(输出与输入的角速度之比)的输入输出图中也有一个极大值[9],达到极大值时的参数是接近最大效率的参数。因此,如果ESC用于控制变速装置的夹紧力-速比图中的极大值,那么将会获得接近最优的效率,可参考[15],[16],[21]和[22]。下文将详细的介绍这种方法,实验评估以及鲁棒性测试。
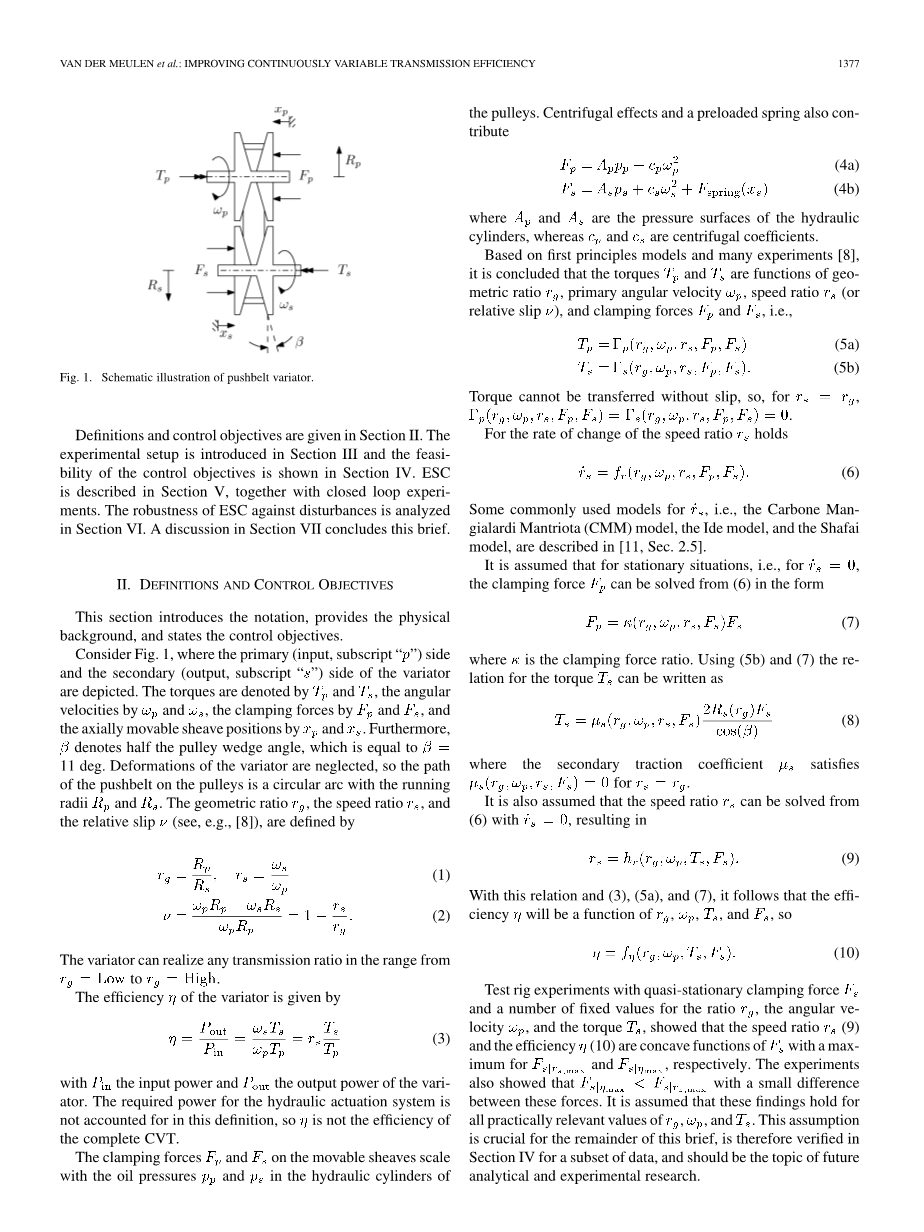
图1.推式传动带变速装置示意图
定义和控制目标在第2部分介绍,第3部分介绍实验装置,第4部分介绍控制目标的可行性,第5部分和闭环实验一起介绍ESC,第6部分进行ESC抗扰动的鲁棒性分析,第7部分总结全文。
2.定义和控制目标
这部分介绍数学符号、物理背景知识以及控制目标。
在图1中,描述了变速装置的主动部分(输入,下标“p”)和从动部分(输出,下标“s”)。转矩用和来表示,角速度用和来表示,夹紧力用来表示,轴向移动锥盘的位置用和来表示。此外,半边锥盘的锥角。忽略变速装置的变形,所以传动带在带轮上做半径为和的圆弧运动。几何比例,速比,相对滑动(参考[8]),定义为
变速装置能实现传动比的连续变化从到。
变速装置的传动效率为
其中是变速装置的输入功率,是输出功率。在该定义中不包含液压驱动系统所需要的功率,因此,不是整个CVT的传动效率。
可移动锥盘上的夹紧力和对应的液压缸的油压和。离心作用和预装载的弹簧有如下关系:
其中和是液压缸的受压面,和是离心系数。
基于基本原理的模型和一些实验,能得到转矩和与几何比、主动轮角速度、速比(或者相对滑动)以及夹紧力和之间的函数关系:
如果没有滑动转矩不能被传递,所以,,。
速比的变化率为:
有一些常用的模型,即,CMM模型、Ide模型、Shafai模型[11,例2.5]等。
假定变速装置在稳定状态下,即,,夹紧力能够根据(6)被求解出来:
其中k是夹紧力比,通过式(5b)和(7),转矩为:
其中从动牵引系数满足,因为。
速比能根据式(6)被求出来,当时,
根据这个关系以及式(3),(5a)和(7),可得出效率与,,和之间的函数关系:
用准稳态的夹紧力和一系列固定值的比例,角速度以及转矩来做实验,实验结果显示速比和效率是的凹函数,并且分别有其极大值和。实验结果还显示出,且这两个力的大小相差很小。假定这些发现的价值几乎对等于。这个假设对下文的叙述是至关重要的,因此,这个假设将在第4部分用数据的子集来验证。而且该假设应该是未来分析和实验研究的课题。
变速装置中心相对滑动的稳定性分析
基于上述相同试验装备的实验,可以得到结论是的函数,且很小时有,很大时有。式(11)的稳定性由的大小来决定,且很小时是稳定状态,很大时是不稳定状态。这两种情形分别与开环稳定和开环不稳定相关。和是一般的单调函数的关系,减小,就会增加,所以,减小可能会加剧相对滑动的不稳定性。由稳态向非稳态过渡的时期是,且,参考[9]。
目前变速装置采用相对或绝对安全策略来控制夹紧力的大小,且即使在大转矩的情形下打滑也是微量的。这些策略的起点可参考式(8)。给定和,就可以决定夹紧力,且必须能够传递给定的转矩。通常是不知道的,但发动机传给变速装置的估计转矩是可以求出来的。根据式(2),(3)和(8)可得:
在相对安全策略中忽略了未知的能量损失和相对滑动,被可求得的近似值所取代,安全系数用来弥补模型不确定性以及转矩的扰动。因此,参考的第二夹紧力[4]为:
式中,是车辆牵引系数的方差,通常,。在效率方面,相对安全策略要比绝对安全策略[4]好,因为后者会造成大夹紧力。
变速装置的控制目标是追踪速比的参考值以使效率最优化,在这种情况下还可以防止变速装置被破坏。主动锥盘的夹紧力的参考值要保证速比一直追踪它的参考值,这个参考值被动力传动管理系统所约束[17]。为了避免追踪出现问题,主动轴的可移动锥盘的位置(几何比例)被约束住。锥盘上的反作用力不能被控制,所以,变速装置的控制器仅仅只将参考值传递给第二夹紧力。
ESC的目标是使与相等,其中是()输入输出图中的极大值。因为这个夹紧力稍大于,而对应的是最大效率,所以ESC有可能会获得接近最优的效率。在上述实验中提到总小于,所以,运用ESC获得的效率要比相对安全策略高。但是,在用ESC时转矩扰动可能引发一些问题,这是因为夹紧力过小。这个问题将在第6部分叙述。
图2.电动机和传动带变速装置的实验装备
3.实验装备
图2显示了试验装备的整体情况,它由两个相同的电机(西门子,型号1PA6184-4NL00-0GA03),一个传动带变速装置(博世传动科技,型号P811),一个液压驱动系统和一个数据采集系统。
电动机的转动惯量是0.503kg[18,pp.]。每个电机都配备有一个旋转编码器(海德汉,型号ERN1387)和一个低电流控制系统。这个控制系统的参考量是电机传递的转矩。就高级控制而言,主动电机采用PI控制器闭环控制速度,而从动电机则是开环转矩控制。变速装置的两轴用两个弹性联轴器连接到电机,这中间还连有转矩传感器(HBM,型号T20WN)。变速装置的第二轴可移动锥盘的位置用一个增量长度计量器(海德汉,型号ST3078)来测量。
液压驱动系统由几个液压泵组成,其作用是驱动和润滑。两个伺服阀门(曼内斯曼力士乐,型号4WS2EE10)控制压力和,这两个伺服阀门由蓄电池供能。每个液压缸都装备有一个压力传感器(GE德鲁克,型号PTX1400)。每个液压回路都是闭环压力控制[23]。
4.准稳态实验
大量的实验结果表明第2部分的假设已被证实。表1指定了实验开始的平稳工作点,实验中的几何比率分为高、低两种情况。在这两种比率中,主动轴可移动锥盘在推力作用下一直运动。这是由于主动压力的作用,压力低时,压力高时。
在每个实验中,主动压力、主动角速度和从动转矩都分别与它们的平稳值、、保持相等。从动压力的参考值随时间t缓慢变化:
表1.几何比率底和高时平稳工作点
|
符号 |
单位 |
||
|
bar |
0 |
20 |
|
|
bar |
25 |
6 |
|
|
rpm |
1000 |
1000 |
|
|
Nm |
14,28hellip;.,84 |
7,14.hellip;,42 |
图3.减小夹紧力时角速度和转矩的大小,(黑线:测量值;灰线:参考值)
图4.减小夹紧力时比率和效率的大小,(黑实线:测量值;灰实线:;黑虚线:;灰虚线:)
图5.不同转矩下ESC和常规控制器的夹紧力和效率[左边:(黑线)和(灰线);右边:(黑线)和(灰线)]
当相对滑动大于5%时,实验就会停止。这种情况是开环不稳定状态。为了获得简洁的结果,只考虑实验时和的情况。其他转矩的实验结果在总结中给出。忽略那些时与上述情形一致的状况。
图3描述了角速度和转矩随时间的变化关系。当tgt;48s时,实验结果将出现偏离,因为变速装置处于开环不稳定状态,实验设备的控制系统不能应对激烈变化的动力系统。角速度误差很小,因为主动电机是闭环速度控制。尽管从动电机是开环转矩控制,但转矩误差比较小,且在可接受的范围内。从动角速度先增加,刚好在t=48s之前达到最大值,随后减小。突变表示系统的不稳定。变速装置中的能量损失减少使得主动转矩减小。
图4给出了夹紧力的函数图像。图中结果可以证实第2部分假设的准确性,因为。
图5中,在所有情况下都有。比例和的平均值分别等于105%和143%。比例和的平均值分别等于99.7%和98.7%。这样就完成了控制器在()输入—输出图中极大值寻找的激励。
5.极值寻求控制
用模型在给定的平稳工作点来估测夹紧力是不够精确地。因为ESC是一种不是基于模型的方法,所以它能运用。
考虑到常量、几何比例、主动角速度和从动转矩,再根据式(9)有:
实际上,变速装置的控制器是通过压力而不是夹紧力来执行控制内容的。压力和夹紧力之间的关系可参考公式(4)。在控制过程中,会代替,关系式会被所取代。在最大时的取值为。控制目标变为:在不需要关于h的输入—输出函数也不要最大值的位置的情况下寻找的最大值。控制器的输出作为液压驱动系统的参考值。
图6.ESC从到的反馈机制
图6描述了一个反馈机制。它运用了一个振动,其中,振幅为,频率为。这个振动加到了控制器的输出中。当正弦振动相比变速装置的运动慢时,变速装置的运动和反馈机制不会发生干涉现象。ESC从到的反馈机制由以下几个关系式组成:
式中是从动部分压力的测量值,速比来源于角速度的测量值。带通滤波器为和抑制直流分量和噪声。结果有一个直流分量,低通滤波器产生。最后,来源于和积分器获得的以及初始条件的综合。和分别代表液压驱动系统和变速装置。
反馈机制由5个参数组成:振动振幅、频率、滤波器和、积分器获得的。这些参数的选择与证明这个闭环系统的稳定性密切相关[14]。在文献[14]中也有一个与图6相似的反馈机制,但是那个采用的是高通滤波器,而本文采用的是带通滤波器,选用带通滤波器可以抑制噪声。
当输入—
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[150755],资料为PDF文档或Word文档,PDF文档可免费转换为Word



