分布式驱动电动汽车驱动控制策略研究开题报告
2020-04-12 16:00:44
1. 研究目的与意义(文献综述)
1.1本课题研究的背景及意义
随着能源匮乏与环境问题的日益严峻,电动汽车得到了全世界的青睐,它有利于保护环境对节能减排能起到显著的作用,所以为了实现人类社会的可持续发展,目前汽车行业已基本达成共识,电动汽车将是未来交通发展的方向[1]。
分布式驱动电动汽车以其独特的优势受到人们广泛的关注,由于其各个驱动轮之间没有机械连接,驱动形式更为灵活多变,使得其驱动控制策略成为当前的研究热点。
剩余内容已隐藏,您需要先支付后才能查看该篇文章全部内容!
2. 研究的基本内容与方案
2.1研究内容
直驶为车辆运行的基本工况,但分布式驱动电动汽车直驶工况的相关研究仍然较少。要想让车辆按照驾驶员的意图行驶,分布式驱动电动汽车的四个轮毂电机该如何协调工作,四个车轮的转矩又该如何分配才能达到更好的动力性亦或是稳定性,确定了控制目标以后又该以什么样的控制方法来使执行器快速准确稳定地达到控制目标。
针对现有研究中存在的问题,以分布式驱动电动汽车直驶工况的驱动控制策略为研究重点,以车辆动力学和控制理论为基础,对车辆直驶的稳定性和直驶工况下车轮纵向力的分配进行了研究。开展如下工作:
剩余内容已隐藏,您需要先支付后才能查看该篇文章全部内容!
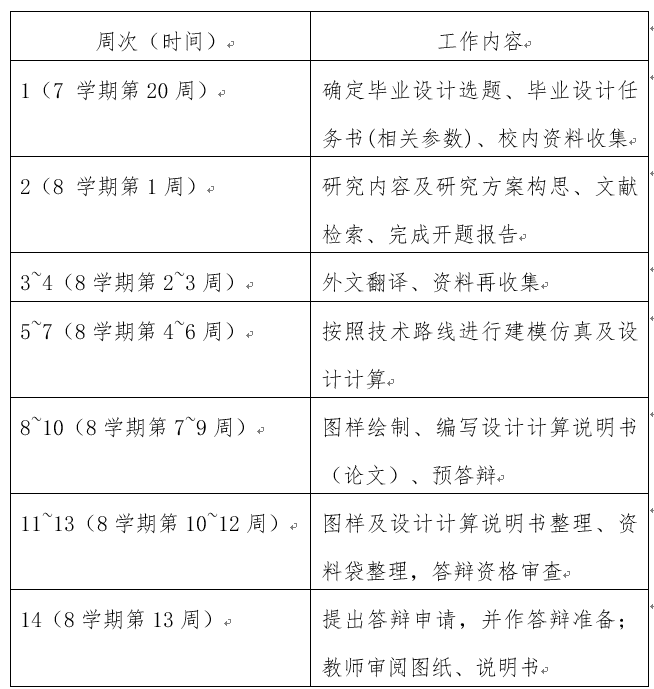
3. 研究计划与安排
4. 参考文献(12篇以上)
[1]国务院办公厅.国务院关于加快培育和发展战略性新兴产业的决定[r]. 2010.
[2]彭金雷.纯电动汽车整车控制策略研究[d].广州:华南理工大学,2013.
[3]葛庆光.纯电动汽车整车控制器的研究[d].合肥:合肥工业大学,2012.
剩余内容已隐藏,您需要先支付 10元 才能查看该篇文章全部内容!立即支付



