自动驾驶车辆的换道轨迹跟踪控制方法研究毕业论文
2020-04-12 16:09:18
摘 要
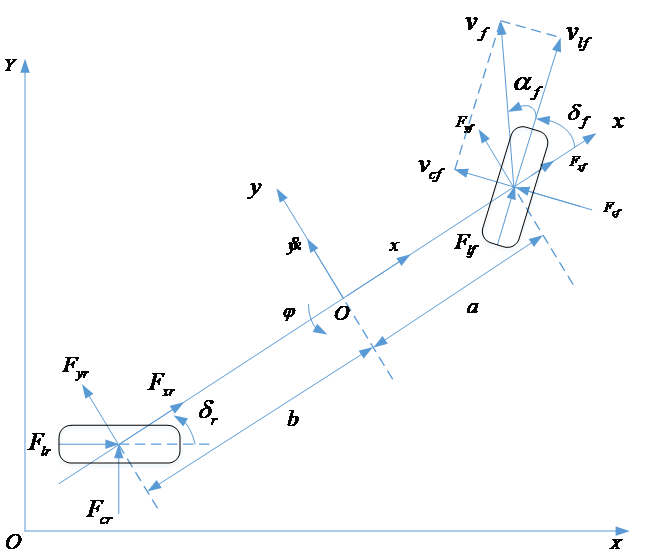
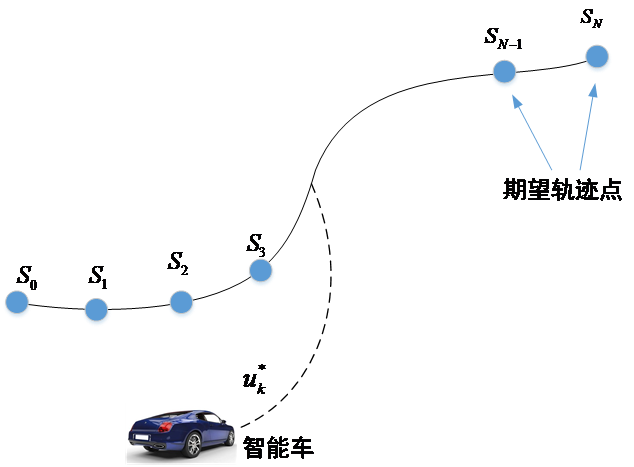
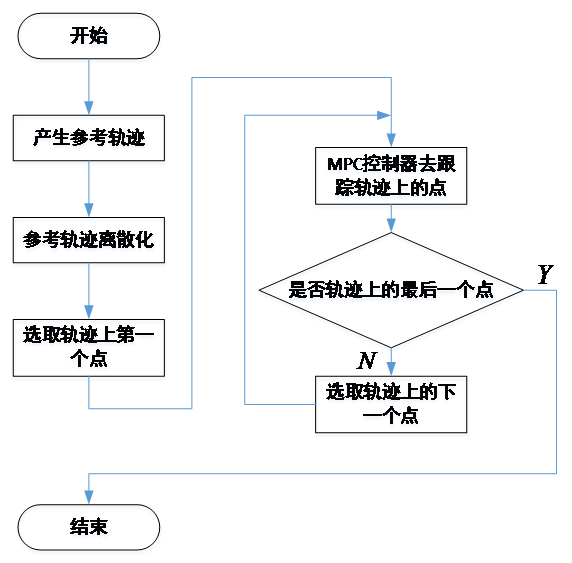
本文研究了自动驾驶车辆,在不同车速条件下进行换道时,设计的控制器对参考轨迹的跟踪能力。经分析后采用跟踪效果较为优秀的模型控制预测算法,建立车辆运动学模型和动力学模型,对模型进行合理的简化,并分别基于这两种模型设计出跟踪轨迹的控制器,对换道的参考轨迹进行跟踪。
本研究借助车辆动力学软件——CarSim软件,实现对车辆的整体建模,并通过其输入/输出接口,与Matlab中的Simulink软件包进行联合仿真,模拟得到自动驾驶车辆分别在匀速、减速和加速条件下跟踪轨迹的情况,以及减速和加速条件下控制器对速度的跟踪效果,并对跟踪结果进行比较,所得结果对进行换道行为的实车试验具有重要的指导意义。
研究结果表明:
- 对于应用于极低速度工况下的运动学模型:自动驾驶车辆对参考轨迹(直线轨迹和圆形轨迹)的跟踪效果比较好。
- 对于应用于高速工况下的动力学模型而言:
1)自动驾驶车辆在跟踪较低速度工况(如60km/h)下的换道轨迹时,其得到的换道轨迹与参考轨迹十分契合;自动驾驶车辆在跟踪较高速度工况下(如120km/h)的换道轨迹时,受到车辆本身限制,会发生侧滑等现象,换道轨迹与参考轨迹的偏差较大;换道轨迹与参考轨迹的契合程度会随着速度的提升而降低;
2)总体而言,自动驾驶车辆在匀速工况下跟踪轨迹的能力优于变速工况;变速工况中,自动驾驶车辆在减速工况下对轨迹的跟踪能力优于对加速工况下对轨迹的跟踪能力;
3)跟踪纵向速度时,加速工况下的跟踪效果好于减速工况;
4)跟踪横向速度时,减速工况下的跟踪效果好于加速工况。
本文的主要特色:
- 采用CarSim/Simulink进行联合仿真而非使用CarSim或者Simulink单独进行仿真,充分利用了两个软件的优势,使仿真结果更加准确直观;
- 分别基于车辆运动学模型和车辆动力学模型设计轨迹跟踪控制器,使得自动驾驶车辆在极低车速时和较高车速时均具有良好的跟踪效果;
- 对车辆动力学模型进行了合理的简化,在提高了运算的实时性的同时,又不影响跟踪的稳定性;
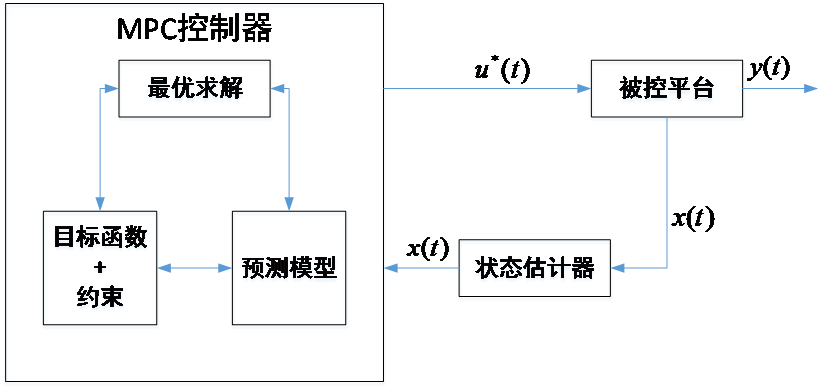
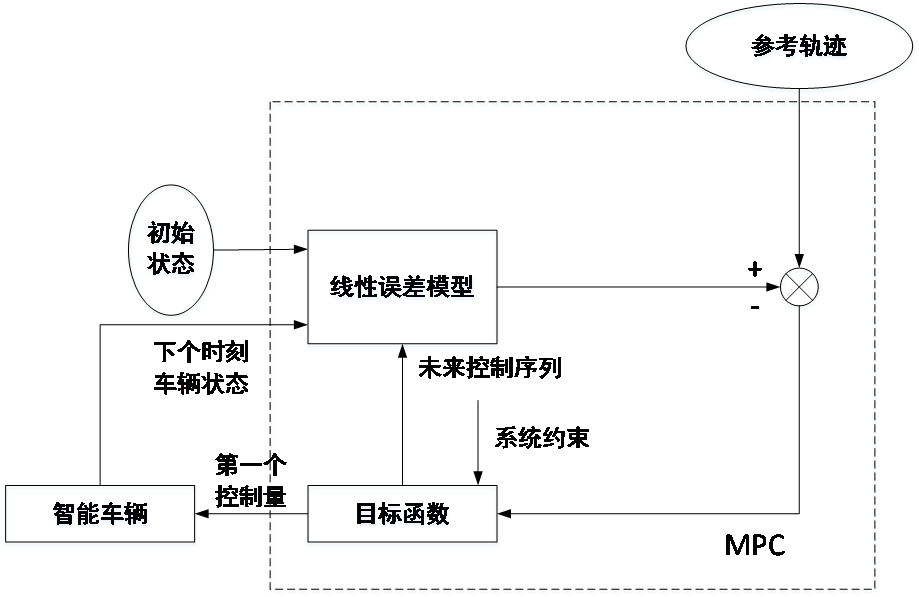
- 采用模型预测控制算法,此种算法能够在控制控制过程中增加多种约束,且受环境改变的影响较小,可以使设计出的控制器对参考轨迹进行稳定的跟踪;
- 换道轨迹选用X-sin函数,兼具计算简便、平滑性好及改善车辆换道时产生侧向加速度阶跃跳变的优点。
关键词:换道行为;轨迹跟踪;模型预测控制算法;联合仿真
Abstract
This paper studies the ability of the controller to track the reference trajectory when changing lanes under different vehicle speed conditions. With some reasonable analysis, a model control predicting algorithm with excellent tracking effect is picked, then we establish a kinematics model and a dynamic model of the vehicle separately, and the dynamic model is reasonably simplified, and a controller for tracking trajectories is designed based on the two models respectively to track the reference track.
In this study, vehicle dynamics software - CarSim software was used to establish the overall vehicle modeling. Through its input/output interface, it was co-simulated with the software package of Simulink in Matlab. The simulation of the situation in which a self-driving vehicle tracks the trajectory under uniform, decelerating, and accelerating conditions, and the simulation of the controller's tracking of speed in deceleration and acceleration conditions were conducted. The results of the simulation under different conditions were compared. The obtained results have important guiding significance for the actual vehicle test of lane changing behavior.
Research indicates:
(1) For the kinematics model applied to very low speed conditions: The results of the self-driving vehicle tracking the reference trajectory which is straight and circular are quite good.
(2) For dynamic models applied under high speed conditions:
1) When a self-driving vehicle tracks lane change trajectories at lower speeds (for example, 60 km/h), the result of the lane change trajectory is in good agreement with the reference trajectory; when the auto-driving vehicle is tracking higher speed conditions ( such as 120 km/h) lane change trajectory, subject to the limitations of the vehicle itself, side slipping and other bad situations may occur. The deviation of the lane change trajectory from the reference trajectory is large; the degree of agreement between the lane change trajectory and the reference trajectory will get lower in company with the increase of the speed.;
2) In general, the ability of auto-driving vehicle to track trajectory in uniform conditions is better than in variable speed conditions; in variable speed conditions, the ability of auto-driving vehicle to track the trajectory is better under deceleration conditions than in acceleration conditions. Trajectory tracking ability;
3) When tracking longitudinal velocity, the tracking effect under the accelerated condition is better than the deceleration condition.
4) When tracking lateral speed, the tracking effect under deceleration condition is better than the acceleration condition.
The main features of this article:
(1) Using CarSim / Simulink for joint simulation rather than carsim or Simulink for simulation alone, making full use of the advantages of the two software and let the results of the simulation more accurate and intuitive;
(2) The trajectory tracking controller is designed based on the vehicle kinematics model and vehicle dynamics model respectively, which makes the self-driving vehicle have a good tracking effect both at very low vehicle speeds and higher vehicle speeds.
(3) Reasonable simplification of the vehicle dynamics model improves the real-time performance of the vehicle and does not affect the stability of the tracking.
(4) The Model Predictive Control Algorithm is adopted. This algorithm can add a variety of constraints in the process of control and is less affected by environmental changes, which can make the designed controller track the reference trajectory much more stable.
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: