电动车整车基于模型的VCU诊断策略设计毕业论文
2020-02-13 17:59:00
摘 要
本文提出一种基于ISO15765协议的汽车故障诊断系统,基于CAN总线实现UDS通用诊断服务,可实现读取/清除故障、读取数据流功能、UDS程序更新、数据解析存储等功能。系统以整车控制器为研究对象,采用虚拟VCU软件实现故障和数据模拟、报文组包及解析等功能,采用Labview软件进行故障诊断系统和虚拟VCU软件程序的开发编写,最终实现基于LabVIEW的CAN总线通信仿真功能和整车控制器VCU的功能测试等功能。
本文重点研究故障诊断标准ISO15765体系协议中数据传输和故障诊断部分。实现故障诊断系统的协议栈研究与设计,物理层和数据链路层基于USB-CAN诊断仪实现CAN总线的数据传输;网络层协议采用LabVIEW软件图形语言进行模块化设计,实现数据的分组、重组;应用层诊断服务以ISO14229协议(UDS)诊断协议为标准实现故障读取、VCU程序更新等功能。故障诊断系统程序采用Labview强大的用户界面和数据处理功能实现系统前面板设计。本故障诊断系统可为车辆诊断技术提供一种方法,具有一定研究价值与意义。
关键词:故障诊断;UDS;CAN总线;ISO1765协议;
Abstract
The paper proposes an automobile fault diagnosis system based on ISO15765 protocol, UDS Universal diagnosis Service can be realized based on CAN bus , and realize the functions such as reading/clearing faults, reading data flow function, UDS program update, data parsing and storage and so on. The system takes the whole vehicle controller as the research object, uses the virtual VCU software to realize the function of fault and data simulation, message packet and parsing, and uses LabVIEW to design and programing the fault diagnosis system and the virtual VCU software program. Finally, realizing the functions of the CAN bus communication simulation based on LabVIEW and the functional test of the vehicle controller VCU and so on.
This paper focuses on the data transmission and fault diagnosis parts of the fault diagnosis standard ISO15765 system protocol. Realizing the protocol stack design of the fault diagnosis system: the physical layer and the data link layer realize the CAN bus data transmission through the USB-CAN diagnostic instrument;The network layer protocol uses the LabVIEW graphical language for modular design to realize data grouping and reorganization; The application layer diagnostic service realizes functions such as fault reading and VCU program update based on the ISO14229 protocol (UDS) diagnostic protocol. The fault diagnosis system program uses LabVIEWrsquo;s powerful user interface and data processing functions to implement the system front panel design. This fault diagnosis system can provide a method for vehicle diagnosis technology, which has certain research value and significance.
Keywords:Fault diagnosis;UDS;CANBUS;ISO15765 Protocol;
目 录
摘 要 I
Abstract II
目 录 1
第1章 绪论 1
1.1 研究背景及意义 1
1.2 汽车诊断协议发展现状 1
1.2.1 诊断协议的发展及现状 1
1.2.2 诊断协议ISO15765的发展现状 2
1.3 本文主要研究内容 2
第2章 通用故障诊断协议的研究与实现 3
2.1 故障诊断协议栈设计 3
2.1.1 物理层和数据链路层实现 3
2.1.2 网络层实现 4
2.1.3 应用层实现 5
2.2 诊断协议ISO15765通信协议 6
2.3 本章小结 7
第3章 故障诊断系统设计与开发 8
3.1 故障诊断系统开发平台 8
3.1.1 硬件系统 8
3.1.2 Labview软件系统简介 8
3.2 基于ISO14229(UDS)统一诊断服务 9
3.2.1 概述 9
3.2.2 UDS统一诊断服务消息格式 10
3.3 故障诊断系统功能设计 12
3.3.1 故障诊断系统基本功能设计 12
3.3.2 基于UDS的Bootload功能设计 14
3.3.3 读取数据流功能设计 16
3.4 故障诊断系统总方案设计 17
3.5 故障诊断系统软件实现 18
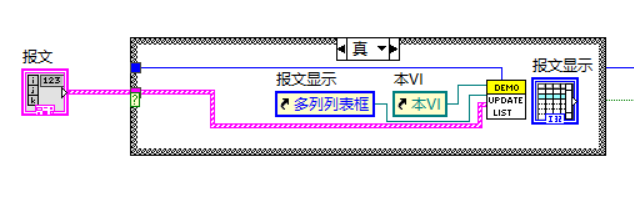
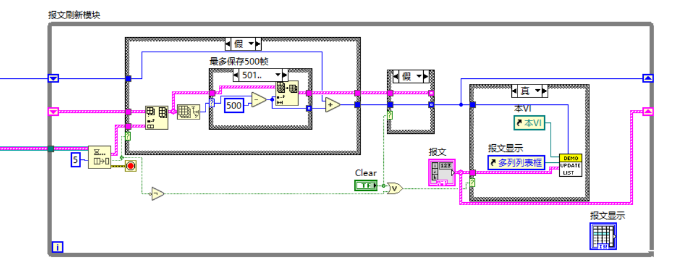
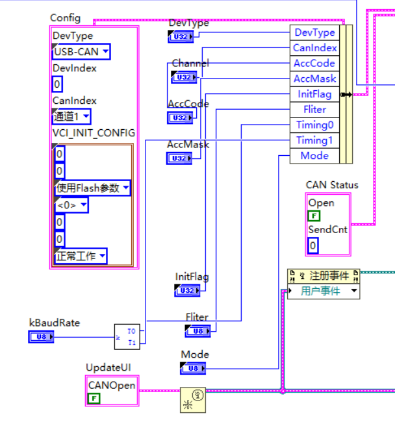
3.5.1 通信功能设计 19
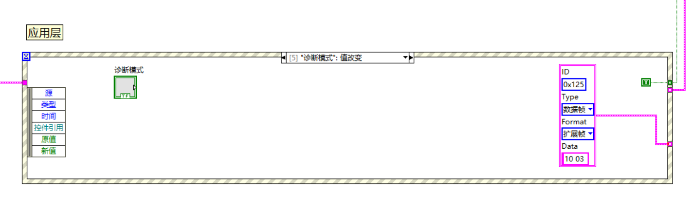
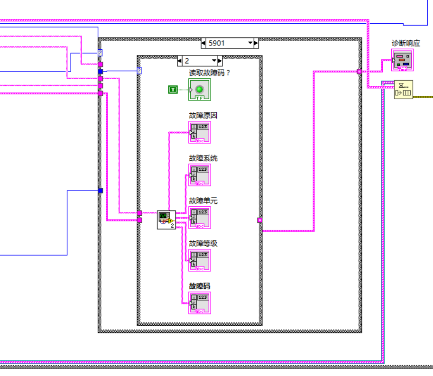
3.5.2 诊断功能设计 21
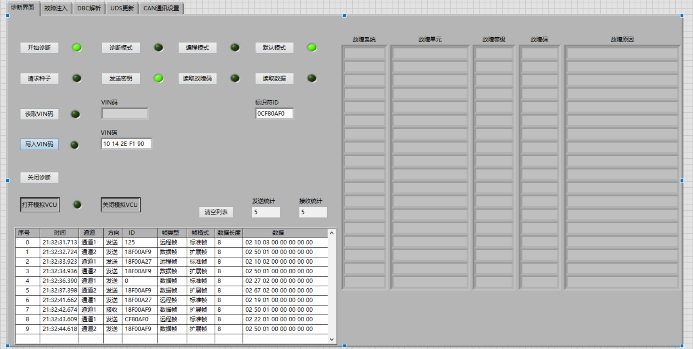
3.6 故障诊断系统前面板设计 21
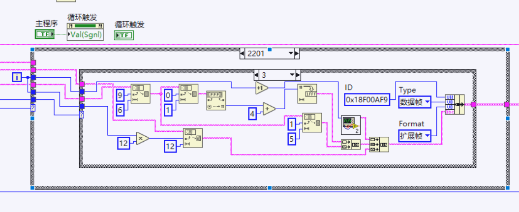
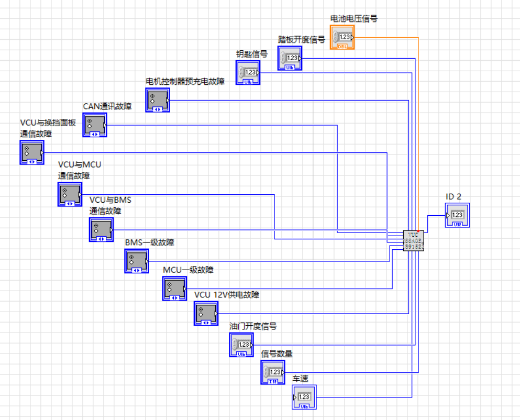
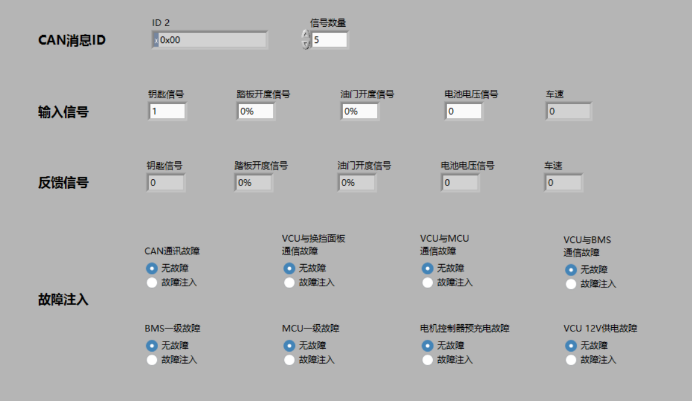
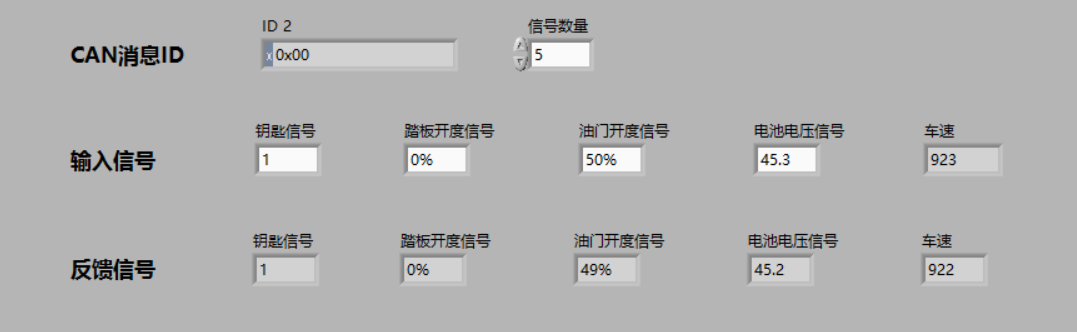
3.7 模拟整车控制器VCU软件实现 22
3.8 模拟整车控制器VCU前面板设计 23
3.9 本章小结 24
第4章 故障诊断系统仿真及测试 25
4.1 基于LabVIEW的CAN通信总线仿真 25
4.2 基于UDS协议的ECU测试 26
4.2.1 ECU的输入输出功能测试方案 26
4.2.2 ECU功能案例测试 26
第5章 总结与展望 28
5.1 总结 28
5.2 展望 28
参考文献 29
致谢 30
绪论
研究背景及意义
传统电子系统大多采用点对点的单一通信方式给布线系统带去极大困难。随着电控技术的发展,车载总线的需求变得迫切。CAN-BUS(Controller Area Network):控制器局域网,是目前国际上应用最广泛的现场总线之一;为串行通讯总线,具备高位速率、高抗磁干扰性、传输距离远等优点;采用单通道、双线容错协议,支持多个主节点通信,通信介质普遍采用双绞线,采用差分信号作为传输信号更加可靠。随着CAN总线技术的发展日趋成熟,ISO1765 CAN-BUS通讯协议成为汽车故障诊断系统的发展趋势。
目前,国外汽车CAN总线技术已经十分成熟且应用非常广泛,随着CAN总线技术的进一步发展与普及,ISO15765标准协议必将成为汽车行业的发展的必然趋势。而国内汽车CAN总线技术还村子一定差距,电子控制技术和故障诊断系统开发能力还不够完善,汽车诊断方面的研发水平还有一定不足,对于国内汽车故障诊断发展现状,本文基于电动汽车故障诊断研究ISO15765标准协议,设计了一种基于LabVIEW的故障诊断系统,实现了基于ISO15765协议的故障信息读取、程序更新、数据流读取等功能,不但可以降低汽车维修的成本和提高汽车的安全稳定性,还可以对故障诊断系统发展提供一定的研究方法具有一定的借鉴意义。
汽车诊断协议发展现状
诊断协议的发展及现状
随着电子控制技术在汽车领域的快速发展及应用,汽车电控单元(ECU)大量应用于汽车中,汽车整体性能得到显著提升,而汽车电子控制单元种类更加繁多、结构更加复杂,给汽车维修工作带去极大的困难。同时,电子控制单元自身的故障问题也将导致汽车难以运行甚至失控等难以预测的后果。因此,汽车电子控制开发人员相应增加了故障自诊断系统以保证汽车安全性,。1993年前,第一代随车自诊断系统(OBD-Ⅰ)出现,但其种类繁多、各成体系,给售后及维修带去极大不便。OBD-Ⅱ标准规范由美国汽车工程协会(SAE)提出,各汽车制造商通过执行该规范可对诊断系统进行统一。
OBD-Ⅱ标准协议包括:ISO9141-2,ISO14230(KWP2000),SAE JI850PWM,SAE JI850 VPM,ISO15765-4(CAN-BUS)。在出现CAN-BUS协议前,欧洲和多数亚洲国家最常用IOS8141-4通信协议,美国通用汽车使用SAE JI850 VPW通讯协议,福特汽车采用SAE JI850PWM通讯协议[1]。随着汽车CAN总线局域网的发展,ISO15765-4(CAN-BUS)协议成为汽车领域的通讯标准规范。
诊断协议ISO15765的发展现状
ISO14229通讯协议是为诊断系统定义通用规范而制定的,定义了通用诊断服务(UDS),诊断设备可利用其对车辆各ECU单元实现诊断功能,该协议只定义了应用层服务。ISO15765通讯协议是一种基于CAN总线的汽车诊断协议,该标准协议本质上是为在汽车CAN总线上实现了ISO14229(UDS)协议,该协议符合当今汽车网络总线系统的发展方向,目前已被许多汽车制造商采用,将成为未来汽车行业的统一诊断标准协议[2]。
目前对于ISO15765标准协议的研究主要分为汽车制造商原厂专用汽车诊断仪和基于PC客户端的故障诊断系统。其中,制造商原厂诊断仪主要诊断一种类型或本厂开发的车型,能够最大程度满足车辆故障检测的各项要求,同时支持一些本厂车型的特定诊断功能。但其仍存在较大不足:该诊断仪只能检测本厂或特定车型,覆盖范围窄;价格较高,一般修理厂难以承担。对于PC端的诊断系统主要基于上位机软件开发。其特点为操作简单、上手容易、界面美观,受到研发人员的广泛使用。但其存在便携性差、性价比低、续航低的缺点而难以被推广。本文研究主要内容为基于PC端LabCIEW软件上位机的故障诊断系统,研究ISO15765协议以实现故障诊断、程序更新、数据读取等功能。
本文主要研究内容
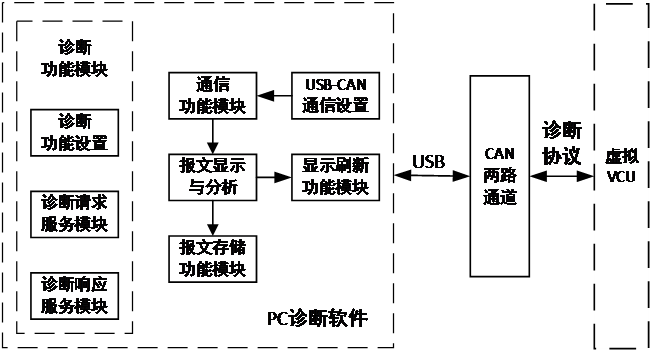
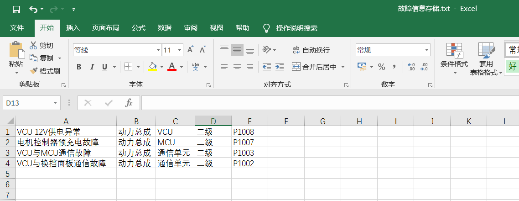
本文研究了一种基于ISO15765诊断协议的故障诊断系统,该系统以电动汽车整车控制器为研究对象进行故障诊断系统的研究与设计;由CAN总线分析仪、Labvew上位机软件、虚拟VCU软件组成;基于汽车CAN总线协议及硬件,利用Labview软件编写程序代码,实现读取/清除故障代码信息、读取数据流、基于UDS程序更新等功能;将故障信息及数据实时记录至Excel表格中。主要工作包括以下内容:
研究和分析故障诊断OSI模型及其相关标准协议,制定故障诊断系统协议栈方案,根据ISO14229(UDS)通用诊断协议,制定故障诊断功能、程序更新功能、数据读取功能等方案;采用LabVIEW图形语言编程软件对故障诊断系统进行模块化编程,实现各模块的重复调用,完成故障诊断系统的编程设计和用户界面设计;编写虚拟整车控制器VCU测试软件,实现故障诊断系统VCU的CAN总线通信仿真和VCU的功能测试功能。
通用故障诊断协议的研究与实现
ISO15765通讯协议作为汽车故障诊断的高层协议,依照OSI模型定义了应用层、网络层、数据链路层和物理层。本文基于CAN总线实现故障诊断协议栈的数据传输,协议栈分为应用层、网络层和CAN协议层,各层为上一层提供服务[3]。本章从故障诊断协议栈各层出发,实现了由应用层数据到CAN总线报文信息的传输。
故障诊断协议栈设计
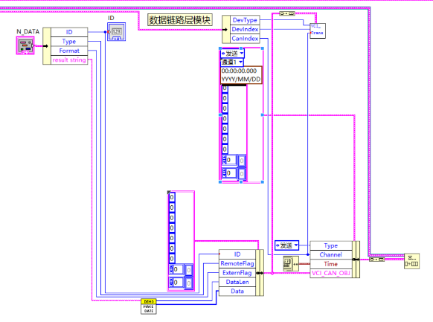
物理层和数据链路层实现
CAN通讯传输协议
ISO15765标准体系中数据链路层、物理层基于CAN总线ISO11898通信协议制定。CAN协议规范报文传输帧分为四种类型:数据帧、远程帧、错误帧、过载帧(见表 2‑1 CAN协议表报文帧类型及用途);帧格式分为标准帧和拓展帧,标准帧格式由11位标识符ID组成,拓展帧格式由29位标识符ID组成。
表 2‑1 CAN协议表报文帧类型及用途
|
帧类型 |
帧用途 |
|
数据帧 |
数据帧是由发送节点向接受节点发送数据的帧 |
|
远程帧 |
远程帧是由接受节点向有相同标识符ID的发送节点发送数据的帧 |
|
错误帧 |
用以当总线检测到错误时向其他节点发送错误的帧 |
|
过载帧 |
接收节点用来通知还没做好接收准备的帧 |
本文中故障诊断系统数据传输采用SAE JI939协议规定的29位标识符标准CAN拓展帧(见表 2‑2)作为数据传输单元,依据ISO15765-3协议中对CAN标识符进行定义:
(1)优先级:诊断通讯信息/帧的优先级定义为6。
(2)拓展帧数据页及数据页:有SAE J1939定义或厂家定义,规定的29位标识符拓展帧数据页及数据页分别为0、0,0、1或1、0,本文定义拓展帧数据页及数据页为1、0。
(3)PDU格式:拓展帧中29位标识符ID和8Byte的数据域组成协议数据单元。PDU分为两种格式,其由PF值决定。PF值在0-239之间时,称为PDU1格式,即PS表示目标地址,计算PGN值时PS位为0;PF值在240-255之间时,称为PDU2格式,PS表示组拓展。
(4)源地址:每个长度为11位,一个地址包含两个部分(网络地址和节点地址)。SAE J1939协议对诊断通信网络节点地址进行规定,规定外接诊断设备1地址为0xF9,车载诊断管理单元地址采用整车控制器为0x27,本文采用虚拟ECU将其地址规定为整车控制器地址0x27。因此故障诊断系统发送地址为1AF027F9,接收地址为1AF0F927[4]。
表 2‑2 29位CAN拓展帧标识符格式
|
位数 |
28-26 |
25 |
24 |
23-16 |
21-11 |
10-0 |
|
名称 |
优先级 |
拓展数据页 |
数据页 |
PDU格式 (PF) |
PDU指定 (PS) |
源地址 (SA) |
|
数值(hex) |
1 1 0 |
1 |
0 |
F0 |
F9 |
27 |
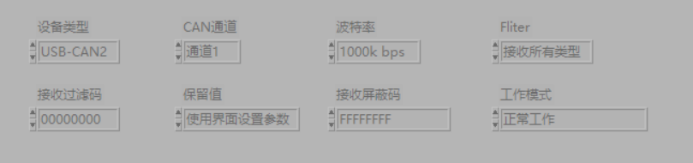
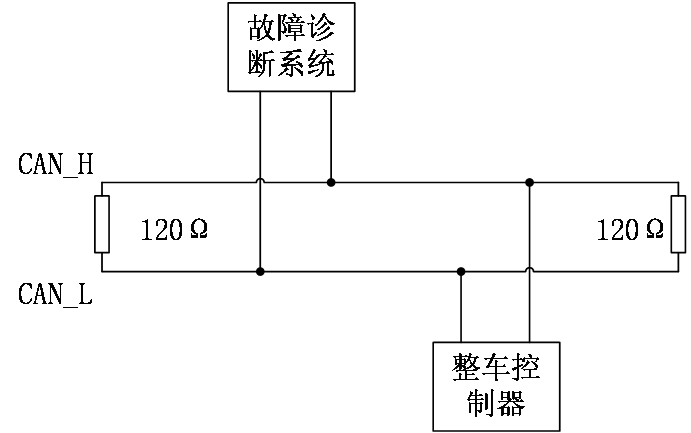
物理层实现采用USB-CAN分析仪,其含有两路CAN通道,可实现CAN拓展格式数据帧在CAN总线中各节点间的报文传输与服务等。
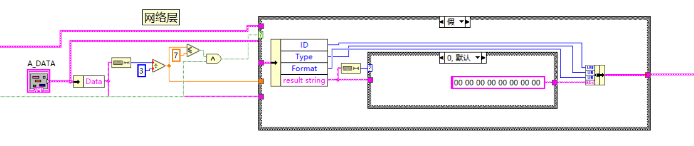
网络层实现
网络层主要功能为向应用层提供服务接口,实现网络层到应用层数据的分组、重组以传输数据流。
网络层内部主要进行数据的分组和重组。数据链路层中数据传输单元为CAN数据帧,数据域含有8Byte,当传输报文数据大于8Byte时,网络层必须对其进行分组、重组实现长数据的传输。因此网络层定义四种N_PDU格式(见表 2‑3)实现分组、重组功能,分别为:单帧(SF)、首帧(FF)、连续帧(CF)、流控帧(FC)。当请求服务中要传输的数据长度小于等于8Byte时,将应用层数据封装为单帧格式发送到数据链路层;当数据长度大于8Byte时,需要对报文数据进行分组,数据到达数据链路层后进行重组从而完成数据的传输[5]。
表 2‑3 网络层N_PDU格式
|
N_PDU单元名称 |
N_PCI字节 |
||||||
|
字节1 |
字节2 |
字节3 |
|||||
|
位7-0 |
位3-0 |
||||||
|
单帧 |
0 |
单位数据长度 |
|||||
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: