基于dspace的汽车主动避撞实验研究毕业论文
2020-02-17 10:53:17
摘 要
随着汽车工业的发展,高级智能驾驶与安全技术越来越受到重视。车辆避撞系统作为重要的汽车先进安全技术早在上世纪末就已经开始了研究,旨在提高道路交通安全水平。在此背景下,本文围绕着汽车主动避撞的程序设计设计与实验等问题,基于“控制策略分析-数学建模-实时仿真-实验验证”的思想,利用多种软件与硬件相结合的方式对主动避撞系统及其实验进行了研究验证。本文的研究内容主要包括以下几个方面:
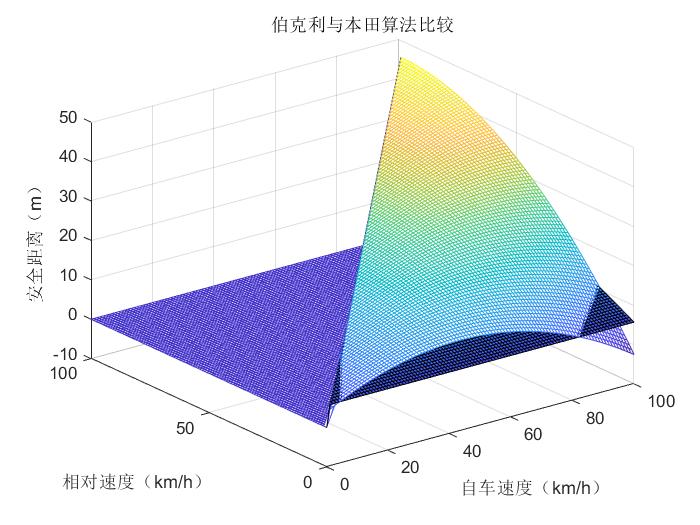
(1)基于电动汽车的尺寸与性能参数,在Carsim软件中建立了电动汽车的动力学模型。研究比较马自达、本田与伯克利安全距离算法的优缺点,基于这三种安全距离算法在Simulink软件中搭建主动避撞模型,对不同的危险工况进行仿真,分析比较出基于本田安全距离算法的主动避撞模型能满足各种工况的要求。
(2)构建了基于dSPACE平台的避撞程序,进行硬件在环的实时仿真,其结果与软件仿真结果一致都满足了避撞的要求,为后续的实车实验做下理论基础。
(3)在校内完成了低速的实车避撞实验。实验结果表明:设计的主动避撞系统能避免车辆与前方障碍物的碰撞。并根据实车实验的结果对本田算法中的关键参数进行了调整,使系统在满足安全的前提下更符合实际的驾驶风格。
关键词:主动避撞系统,安全距离模型,实车实验,dSPACE
Abstract
With the development of automobile, advanced intelligent driving and safety technology have been paid more and more attention. Vehicle collision avoidance system, as an important advanced vehicle safety technology, has been studied as early as the end of last century. In such circumstance, focusing on the idea of "control strategy analysis -- mathematical modeling -- real-time simulation -- experimental verification", this paper designs the vehicle's active collision avoidance program by combining various software and hardware, then verifies the system by experiment. This paper mainly includes the following aspects:
(1) Based on the size and performance parameters of electric vehicle, the dynamic model of electric vehicle is established in Carsim. The advantages and disadvantages of Mazda, Honda and Berkeley safe distance algorithms were studied and compared. Based on these three safe distance algorithms, an active collision avoidance model was built in Matlab/Simulink to simulate different dangerous working conditions. After analyzing and comparing the results, it can be concluded that the active collision avoidance model based on Honda safe distance algorithm could meet the requirements of various working conditions.
(2) A collision avoidance program based on the dSPACE platform was built to carry out real-time simulation of the hardware in the loop. The results were consistent with the software simulation results, both of which meet the requirements of collision avoidance. This real-time simulation establishs a theoretical foundation for subsequent real vehicle experiments.
(3) In the school, a low-speed collision avoidance experiment with real electric car was carried out. The experimental results show that the designed active collision avoidance system can avoid the collision between vehicles and obstacles. The key parameters of Honda algorithm are adjusted according to the results of the real car experiment, so that the system is more consistent with the actual driving style under the premise of safety.
Keywords:Active collision avoidance system, safety distance model, vehicle experiment, dSPACE
目 录
目 录 1
第 1 章 绪论 1
1.1 问题提出与研究意义 1
1.2 汽车避撞国内外研究现状 1
1.3 车辆主动避撞系统存在的问题 2
1.4 本文的主要研究内容与结构安排 2
第 2 章 电动汽车主动避撞系统 4
2.1 电动汽车动力学建模 4
2.2 主动避撞系统设计思路 5
2.3 安全距离模型 7
2.3.1 马自达安全距离算法 7
2.3.2 本田安全距离算法 8
2.3.3 加利福利亚大学的改进安全距离算法 10
2.4 本章小结 11
第 3 章 电动汽车主动避撞模型建立与仿真 12
3.1 三种典型工况分析 12
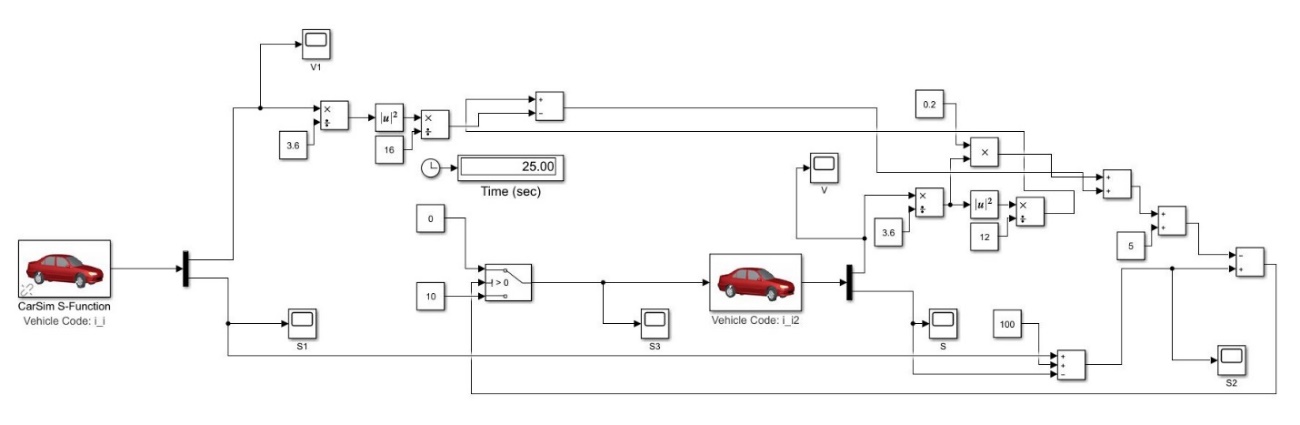
3.2 主动避撞模型建立与优化 12
3.3 主动避撞模型仿真 15
3.3.1 前方静止工况 15
3.3.2 前方紧急制动 17
3.3.3 旁车插入主车道 19
3.4 控制系统仿真硬件平台 20
3.5 避撞性能验证仿真 21
3.6 本章小结 24
第 4 章 低速主动避撞实车实验 25
4.1 实验条件 25
4.2 实验原理 26
4.3 实验数据与分析 26
4.3.1 数据处理 26
4.3.2 数据分析 28
4.4 避撞模型参数改进 29
4.5 本章小结 30
第 5 章 全文总结 31
5.1 本文研究工作总结 31
5.2 需要进一步研究的内容 31
参考文献 32
附录 33
致谢 34
绪论
问题提出与研究意义
当今世界,汽车已经成为人们出行必备的交通工具之一,目前世界上汽车的保有量大约在在12亿辆左右,并且以每年4000万辆的速度递增。随着保有量的提升与车速的加快,交通安全问题也日益严峻。根据中国交通运输部联合德国机动车监督协会共同编撰的《道路交通运输安全运输报告(2017)》表明。2016年,中国共接报道发生路交通事故864.3万起,同比增加65.9万起,上升16.5%,其中,涉及人员伤亡的道路交通事故212846起,造成63093人死亡、226430人受伤,直接财产损失12.1亿元[1]。面对如此严重的交通问题汽车主动避撞系统的研究也应运而生,近年来已成为企业与学术界研究的重点,其研究对汽车的工程应用于科学研究都有着重要的意义。本文以电动汽车为研究对象,分别从车辆动力学建模,安全距离模型与避撞程序仿真与实车试验几个方面进行了较为深入的研究。
汽车避撞国内外研究现状
从上世纪末开始,国外相继开始了汽车避撞预警系统的研究,德国奔驰在S级轿车上安装了雷达,实现了车辆在40km/h至160km/h范围内的自动调速,同时它能检测自车与前车相对间距,一旦两车距离较近自车自动减速[8]。日本丰田汽车公司在1995年把毫米波雷达用在了汽车主动安全系统中,并研制出了立体雷达避撞系统,控制系统根据采集的数据判断当前是否存在碰撞可能,如有危险则提醒驾驶员。美国自20世纪90年代初以来,更多的避撞算法和系统被提出[2]。Doi等人研究了避撞系统在公路的直线段和曲线段的有效性。他们发现了四要素:前视传感器(激光雷达)、路径估计、碰撞预测和自动刹车控制,提出了一种基于雷达的自动制动系统防止车辆追尾或在不产生不利影响的情况下降低碰撞速度对正常驾驶的影响[15]。
国内在汽车主动避撞系统的研究相对滞后,其主要集中在汽车企业和各科研院所。清华大学侯德藻基于制动过程的动力学特性,提出了反映驾驶员特性的车间距保持安全距离模型,并研究了纵向避撞控制方法[3]。同时还有武汉理工大学、吉林大学、同济大学、北京理工大学等高校都在进行这方面的研究[16]。然而,不可否认的是我国对主动避撞系统的研究仍处于初级阶段,还存在许多问题去研究与解决。
目前,车辆主动避撞系统通过雷达与摄像头获取的外界信息包括车速、障碍物和与前车之间地相对距离等等,来判断车辆是否有安全隐患,给驾驶员提供报警或提示信息。如果驾驶员没有及时做出反应的话,主动避撞系统将自动控制车辆,使车辆能够避免碰撞,保证车辆安全行驶。主动避撞系统大致可以分为以下几种类型:
(1)纵向主动避撞系统。当驾驶员对前方的紧急状况未及时做出反应时,主动避撞系统通过使车辆自动制动,避免追尾事故的产生或减轻追尾事故的碰撞程度。
(2)侧向主动避撞系统。他主要通过自动控制车辆转向系统,从侧面绕过障碍物,并且当车辆超过前方障碍物时,避免侧面碰撞事故。
(3)复合型智能避撞系统[11]。当车辆前方遇到障碍物时,首先判断能否通过制动避免碰撞,当不满足要求时,该系统将结合制动与转向系统控制车辆减速绕过障碍物,从而避免交通事故的发生。
车辆主动避撞系统存在的问题
从上述论述可以看出,近年来,通过汽车企业与科研高校的共同努力,主动避撞系统已经得到了很大提升,然而其仍然存在以下几个方面需要再下一步的发展中继续研究:
(1)驾驶员特性考虑不足[10]。主动避撞系统由于它们在硬件需求上的相似性,可以认为是自适应巡航控制系统的自然扩展。然而,许多汽车制造商在主动避撞产品的设计和发布上更加谨慎,这种保守性主要是由于主动避撞系统是一种驾驶员在环的控制系统。对自适应巡航而言,产品的设计是为了在不需要人为干预的情况下(安全的车距、很小相对速度)保持车辆的运行,驾驶员的特征相对不重要。然而,在主动避撞系统中,车辆处于驾驶员控制之中,司机有责任对警告作出反应或与自动制动系统一起行动。因此,设计一个能够适应多种驾驶员特征的主动避撞系统是非常必要的。
(2)缺乏规范化的试验流程。欧盟提出了ECE R131法规,针对商用车的主动避撞功能的试验方法做出了详细要求,我国在《机动车运行安全技术条件中》也只规定了客车需要安装符合国家标准的主动避撞系统[4]。然而在乘用车避撞系统的实验上还缺乏相关的法规规定。
(3)国内的主动避撞程序主要集中在纵向上,对于侧向换道的研究还比较少。因此如何能将两种避撞模式融合,并在实际工况下选择更安全、更符合驾驶员特性的避撞方式,也是一项需要深入研究的问题。
本文的主要研究内容与结构安排
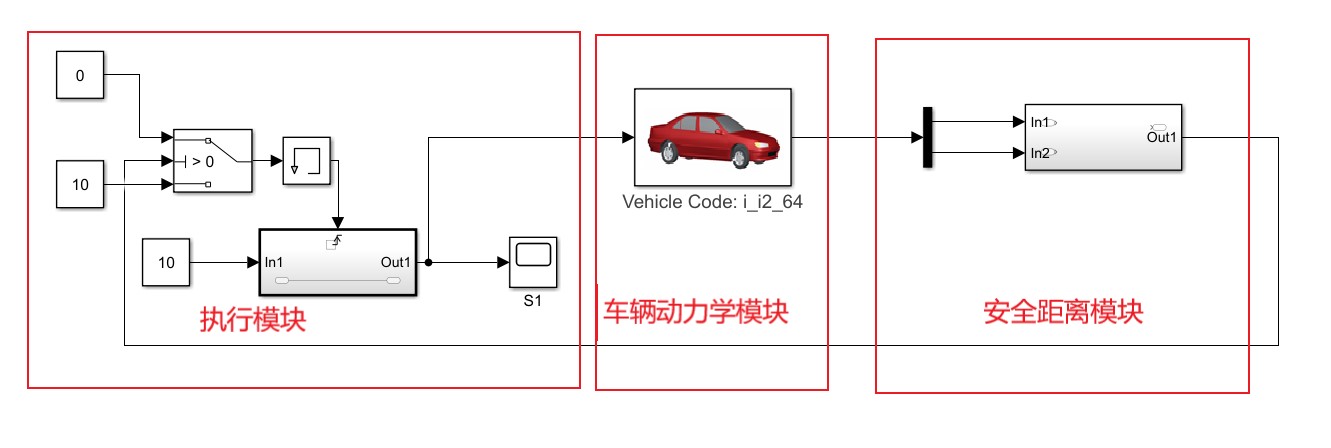
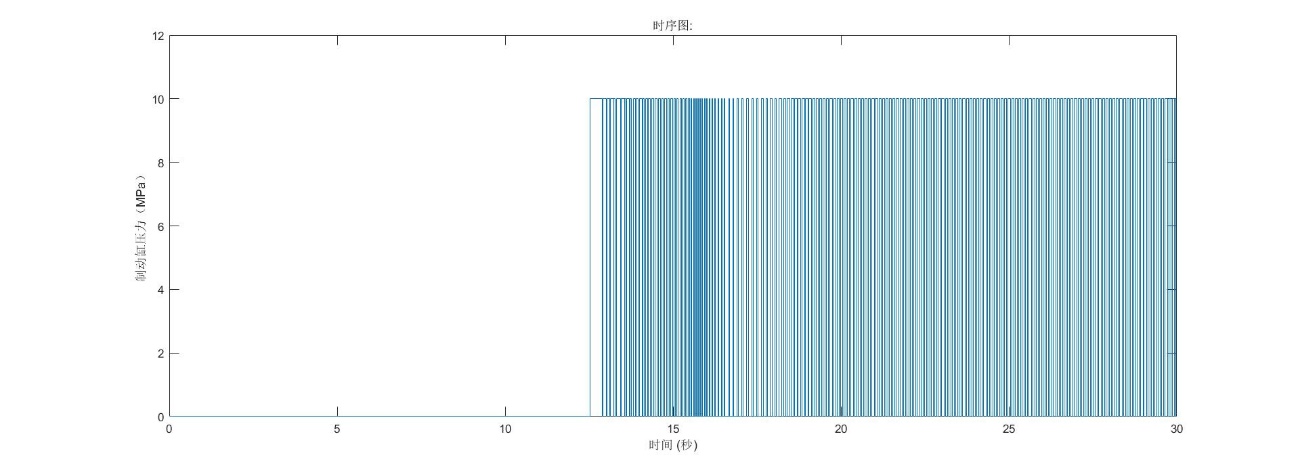
本次研究主要对纵向主动避撞程序进行设计,基于Carsim整车动力模型与Simulink控制器模型进行联合仿真。对仿真结果进行处理分析,比较模型在不同工况下的控制效果。在此基础上通过dSPACE硬件在环软件进行实时的在线仿真。最后将模型导入实车上,根据感知层(由摄像头与雷达结合组成)传来的数据,通过CAN通信传输给到dSPACE中的主动避撞程序进行安全状态的判断,当车辆处于危险状态时,dSPACE会控制液压缸的压力实现制动。
主要研究内容如下:
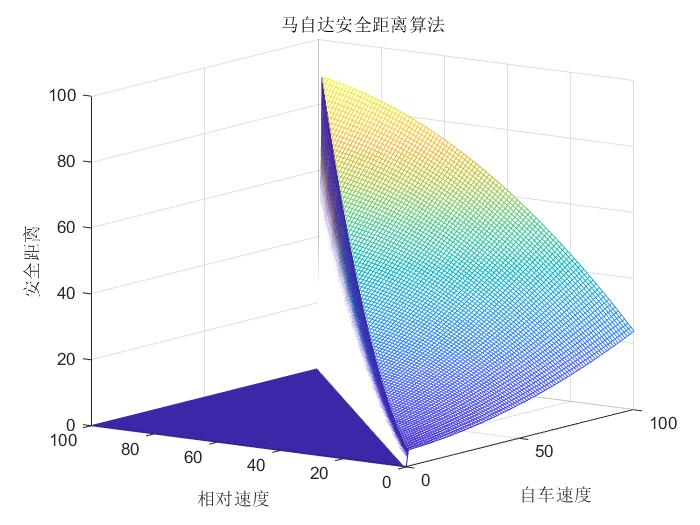
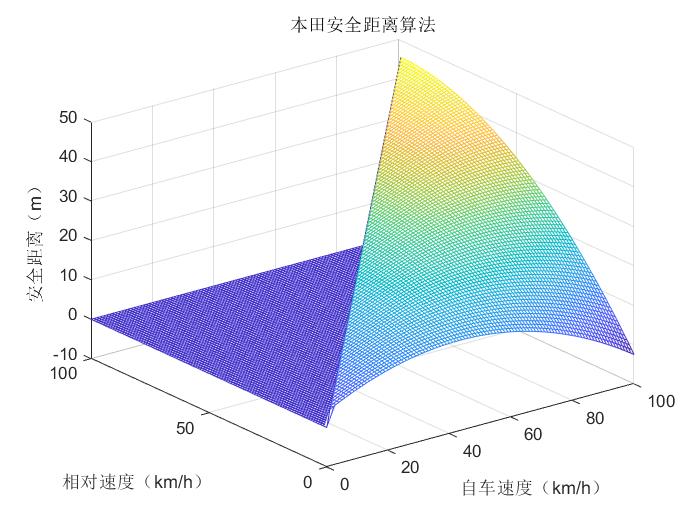
(1)安全距离模型建立,安全距离模型是安全状态判定的前提是主动避撞程序保证的重要环节。比较马自达安全距离模型、本田安全距离模型、加利福利亚大学安全距离模型和车间距保持安全距离模型的实用性与有效性。
(2)对纵向主动避撞系统进行设计,在仿真软件中搭建控制程序。对前方车辆静止和 前方车辆突然急减速以及旁车道车辆突然插入三种典型工况分别进行仿真,检验主动避撞程序的有效性。在dSPACE中对主动避撞程序进行硬件在环实验,比较软件仿真与硬件仿真结果的区别。
(3)在电动汽车上进行主动避撞实车实验,通过dSPACE对车辆进行控制,验证所设计的主动避撞程序的可靠性。
电动汽车主动避撞系统
针对绪论中的研究内容,本章主要提出了主动避撞系统的三大模块。分别对每一个模块进行了设计建模
电动汽车动力学建模
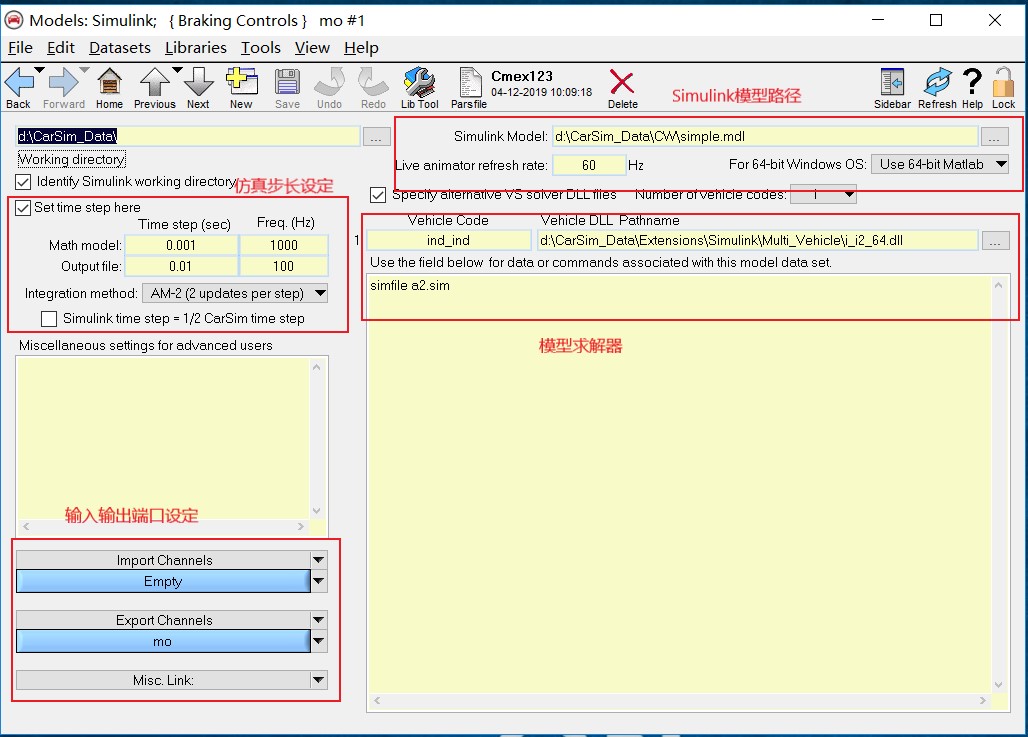
本文为了在较为真实的环境下对避撞系统进行仿真,并且考虑到整车系统非常复杂,因而选择在Carsim软件中对电动汽车进行建模分析。CarSim是由美国机械模拟公司生产和销售的,使用的技术起源于密歇根大学运输研究所(UMTRI)。软件使用数学模型模拟物理测试,能够准确反映汽车对驾驶员输入以及外界环境干扰所产生的动力学响应,在汽车的稳定性、制动性、经济性能的检验上都起到巨大的辅助作用[9]。Carsim平台主要由三部分组成:仿真数据库、模型求解器与仿真后处理器,如图2.1所示。其中仿真数据库包括了整车参数设置(Vehicle Configuration),汽车运动过程及外部环境设置(Procedure)。模型求解器则包括整车输入输出参数的设定,并提供了包括Simulink、dSPACE、Labview等软件的联合仿真接口。仿真结果后处理则包括仿真动画的模拟、仿真数据的绘图等等。
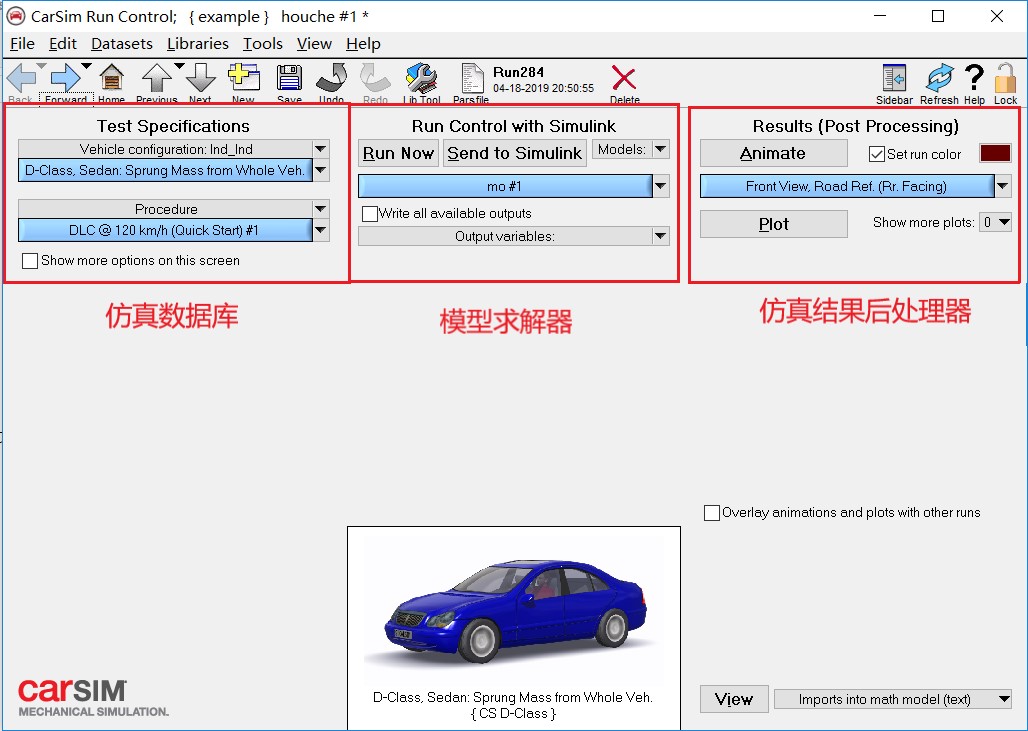
图.1 Carsim仿真平台
由于本次主要是研究纵向主动避撞程序。因此,本次对Carsim前处理参数的设定主要包括了:整车参数(Vehicle Configuration)的设定、驾驶员控制参数(Driver Controls)的设定与道路及路面参数(Ground and Roads)的设定。
在整车参数中选择Carsim中的D-Class Sedan作为车型,考虑到本次实车试验的车辆为四轮毂电机电动汽车,将传动方式改为4-wheel drive,并选择No dataset selected,从外部直接输入电机的驱动力矩。同时,为了提升汽车的制动效果,在制动系统上加上了ABS功能。对于轮胎,全部选择215/55 R17型号的轮胎。最终整车的参数设定如图2.2所示。
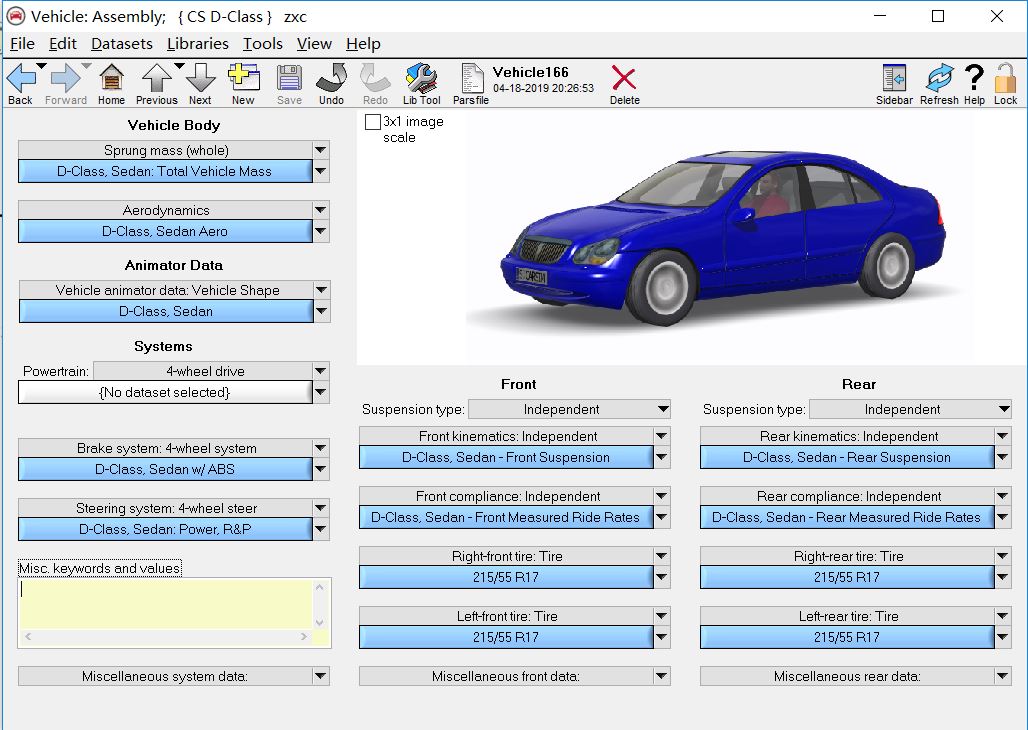
图. 车辆参数设定
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: