紧凑型SUV转向系设计毕业论文
2020-02-17 10:54:15
摘 要
本文根据传统的转向系统设计方法,详细研究了紧凑型SUV的转向系统设计方法,提出了较为可行的技术方案,并根据这一方案进行设计、计算、校核、绘图。在设计过程中,查阅搜集了转向系统的基本结构原理以及发展现状,结合《汽车设计》、《汽车构造》等专业课知识,对转向器进行选型,设计斜齿轮轴、斜齿齿条等各主要部件结构参数,并对其进行强度校核。初步设计转向梯形机构,并利用MATLAB强大的运算功能以及简单的程序语法绘制直观的曲线图对其进行校验。同时对转向操纵机构以及转向传动机构的设计方法进行简要的整理。最后,根据设计参数,分别运用CATIA以及AutoCAD完成齿轮齿条式转向器的三维建模以及二维图纸绘制。本次毕业设计不仅丰富了我的专业知识,并且,让我对汽车零部件设计的流程及规范有了更深刻的认识。
关键词:汽车 转向系统 齿轮齿条 转向梯形
Abstract
In this paper, according to the traditional steering system design method, the steering system design method of compact SUV is studied in detail, and a feasible technical solution is put forward. This article designs, calculates, checks and draws according to this scheme. In the design process, I combined the basic structural principles, the development status of the steering system and the professional knowledge of "Automotive Design" and "Automotive Construction" to select the steering gear and design the helical gear shaft and the helical gear rack. The structural parameters of the main components’ strength are checked. I designed the steering geometry and verified it through drawing intuitive graphs with MATLAB's powerful computational functions and simple program syntax. At the same time, the design methods of the steering operating mechanism and transmission mechanism are briefly arranged. Finally, according to the design parameters, I used CATIA and AutoCAD to complete the 3D modeling and 2D drawing of the rack-and-pinion steering. This graduation design not only enriched my professional knowledge, but also gave me a deeper understanding of the process and specifications of automotive parts design.
Keywords: Automotive Steering system Rack-and-pinion steering Steering geometry
目 录
第1章 绪论 1
1.1 汽车转向系统概述 1
1.1.1 转向系统组成及分类 1
1.1.2 转向系统功用 2
1.1.3 转向系统设计要求 3
1.2 国内外转向系统发展现状 3
1.3 设计基本内容 4
1.3.1 基本内容 4
1.3.2技术方案 5
第2章 转向器的选型及结构设计 6
2.1 转向器的选型 6
2.2 转向器的基本参数设计 6
2.2.1 已知设计参数 6
2.2.2 齿轮基本参数的确定 8
2.2.3 转向系计算载荷的确定 8
2.2.4 小齿轮设计计算 10
2.2.5 小齿轮强度校核 12
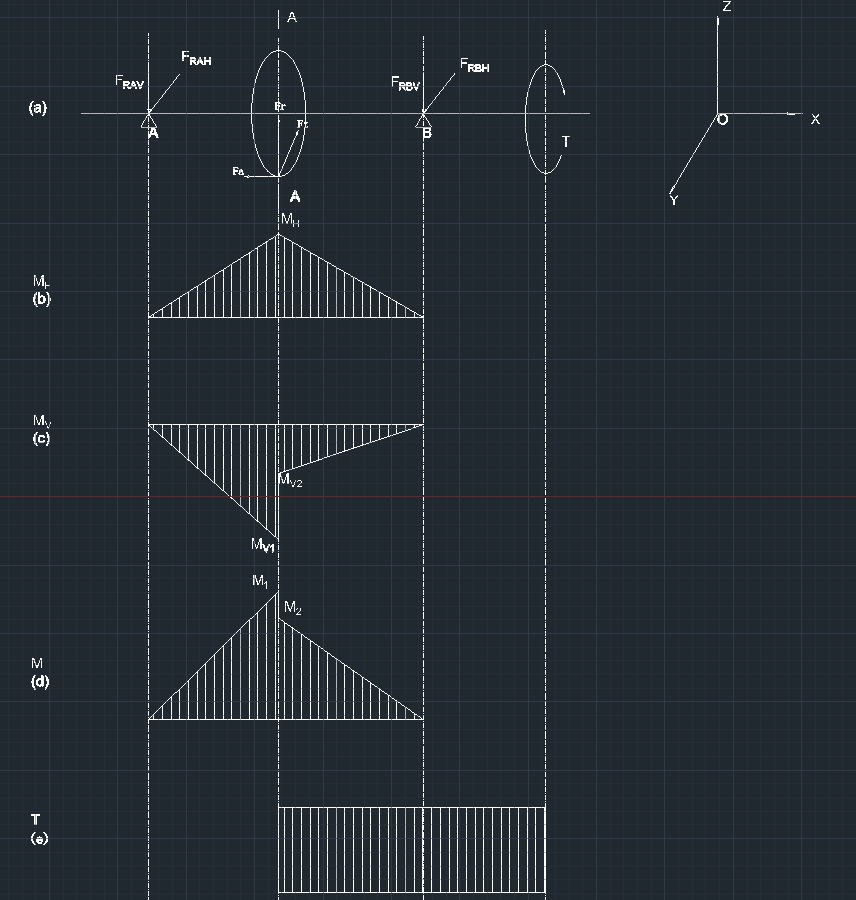
2.2.6 齿轮轴结构设计 14
2.2.7 齿轮轴强度校核 15
2.2.8 齿条设计计算 19
2.2.9 齿轮齿条设计参数小结 20
第3章 转向梯形机构的设计 22
3.1 转向梯形机构概述 22
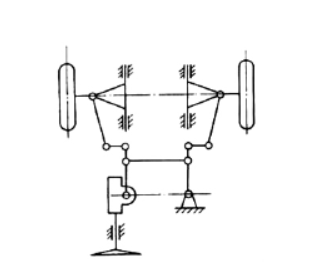
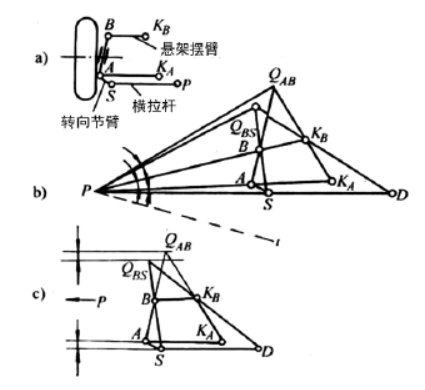
3.2 断开式转向梯形机构设计 22
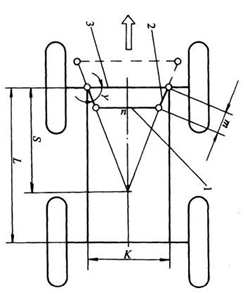
3.3 整体式转向梯形设计实例 23
3.3.1 整体式转向梯形特性分析 23
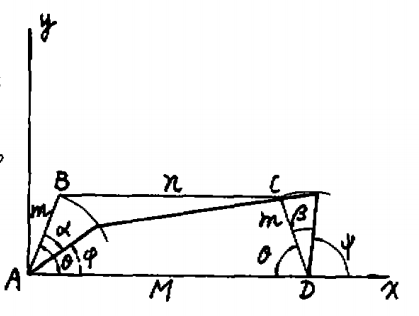
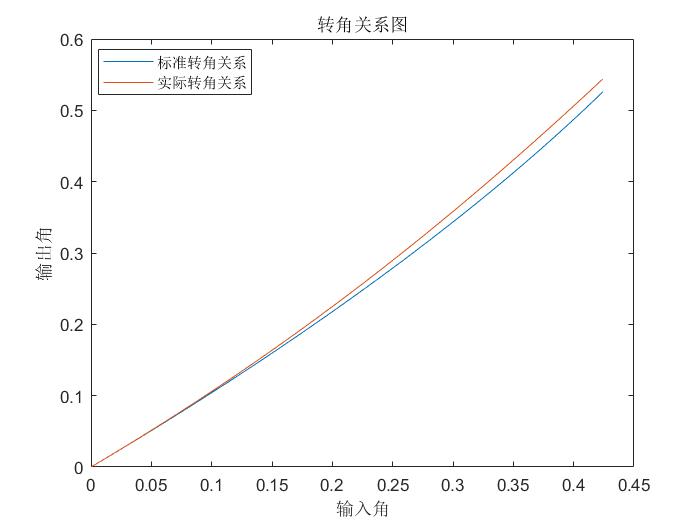
3.3.2转向梯形机构初步设计 24
3.3.3转向梯形机构设计校核 28
第4章 转向操纵机构的设计 32
4.1 转向操纵机构概述 32
4.2 转向盘的布置及尺寸选择 32
4.3 转向轴的防伤安全措施 32
第5章 转向拉杆及前束调整机构的设计 35
5.1 转向拉杆及球销设计 35
5.2 前束调整机构设计 35
第6章 基于CATIA的齿轮齿条式转向器三维建模 36
6.1 CATIA软件简介 36
6.2 齿轮齿条转向器的各部件建模 36
6.2.1 齿轮轴的三维建模 36
6.2.2 齿条的三维建模 38
6.2.3 转向器壳体的三维建模 39
6.2.4 齿轮齿条式转向器总装 40
第7章 结论 41
参考文献 43
附录A 基于MATLAB的转向梯形机构校核程序 44
致谢 45
第1章 绪论
1.1 汽车转向系统概述
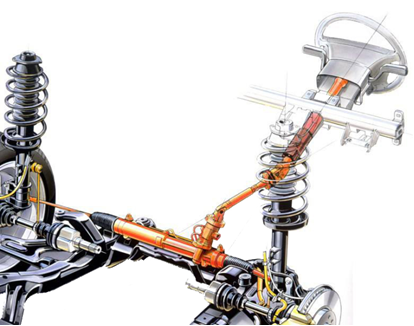 在行驶时,车辆经常会需要根据司机的意志改变方向,也就是汽车转向。如图1.1所示的用于改变或恢复汽车行驶方向的专用机构,称为汽车转向系统。
在行驶时,车辆经常会需要根据司机的意志改变方向,也就是汽车转向。如图1.1所示的用于改变或恢复汽车行驶方向的专用机构,称为汽车转向系统。
图1.1 转向系统
1.1.1 转向系统组成及分类
转向系统根据转向力来源可以分为机械式和动力辅助式两种。
机械式转向系统仅依靠司机对转向盘的作用力进行工作。机械式转向系统所有的用于传递动力的部件都是机械结构的。操纵机构、转向器和传动机构三大部分共同构成了机械式转向系统,一部分汽车还搭载有防伤机构和转向减振机构。转向操纵机构指的是由转向盘至传动轴部分,方向盘、转向万向节和转向传动轴均属其中。而转向传动机构包括摇臂、转向拉杆、节臂、梯形机构等。而转向器则连接了操纵机构和传动机构。
动力转向与机械式转向的差别就在于其增加了辅助增力装置。这一辅助增力装置也承担了动力转向系统除三大转向系统传统部分外的动力输出。
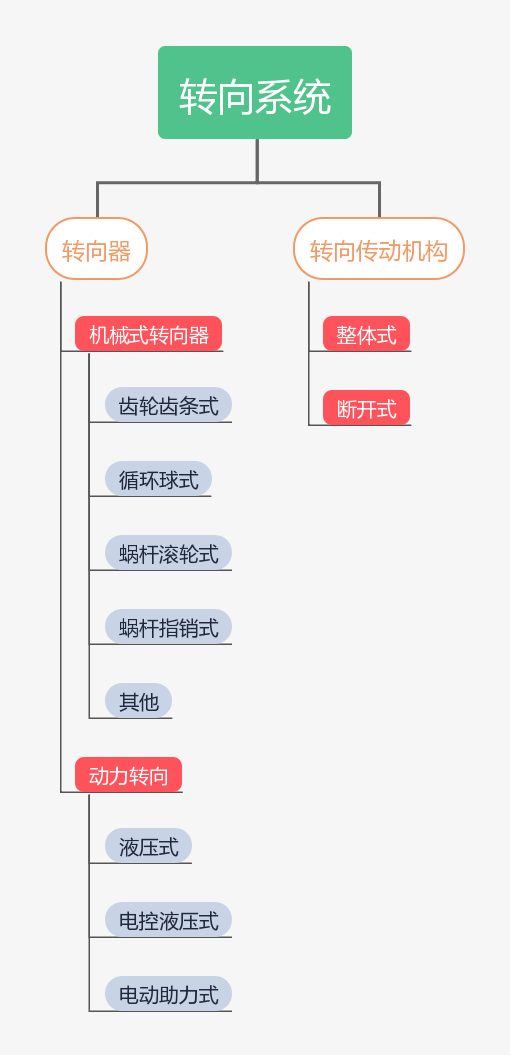 根据转向器和转向传动机构的不同结构特点,转向系统分类如图1.2所示。机械式转向器又有齿轮齿条式、循环球式等,动力转向系统有液压式动力转向、电控液压式动力转向、电动助力式动力转向等。另外转向传动机构又有整体式和断开式两种结构形式。
根据转向器和转向传动机构的不同结构特点,转向系统分类如图1.2所示。机械式转向器又有齿轮齿条式、循环球式等,动力转向系统有液压式动力转向、电控液压式动力转向、电动助力式动力转向等。另外转向传动机构又有整体式和断开式两种结构形式。
图1.2 转向系统分类图
1.1.2 转向系统功用
转向系统是用于维持或改变汽车行进方向的机构,同时确保两转向轮的转角关系合理。作为底盘的一部分,转向系统对车辆的乘坐舒适性、操纵稳定性等均有重要影响[2]。
1.1.3 转向系统设计要求
通常情况下,对转向系统设计有如下要求:
1、传动比应合适,提升操纵轻便性。这里的传动比指的是角传动比和力传动比。当方向盘尺寸和地面对车轮的阻力不变时,角传动比变大,所需转向力小,但转向不够灵敏;反之,缩小角传动比,则转向轻便性差,但转向更加灵敏。
2、转向轮回正力良好。这一点取决于侧偏特性以及前轮定位参数。要确保汽车的行驶稳定性,前轮定位参数必须合理,同时要对转向系统内部的阻力进行合理把控。
3、转向系统和悬架系统避免工作干涉。在设计时就应确保各机构间的运动干涉足够小。
4、为提高系统的可靠性,在转向器同转向传动机构相连的球头处,设置调整间隙机构。
5、转向轴和方向盘必须有防止损伤机构以使司机在发生碰撞时减轻伤害。
6、汽车转弯时,车轮都应围绕同一瞬心运动,避免发生侧滑;另外,方向盘转动方向应该和转向轮相同。
7、如果地面对车轮产生冲击,转向系统应尽量减小其传到转向盘上的作用力。
8、无论怎么行驶,转向轮都不应产生摆振。
9、确保车辆的高机动性。
10、合理设计转向梯形。通过设计正确合适的转向梯形来确保在汽车转向过程中,内、外车轮偏转角度之间的协调关系。
1.2 国内外转向系统发展现状
从1885年汽车发明至今,汽车转向系统一直随汽车技术的革新而改变[3]。转向系统与汽车的“心脏”—发动机的发展过程非常类似,都是先从主体机械部分开始,当主体机械部分发展成熟之后,其控制部分紧接着飞速发展[4-5]。转向器,毫无疑问就是上述转向系统的主体机械部分,经过长期的发展,已经非常成熟。目前主要采用的有齿轮齿条式、循环球式等几种[6]。目前循环球齿条齿扇式转向器应用范围已越来越小,只有在低速汽车上才有应用[7]。尽管机械式转向系统可靠性高,结构简单,制造低廉,但当运用在大型车辆,如拖拉机上时,会导致驾驶员产生疲劳感,转向灵敏性差。很多汽车,为了减轻驾驶人在转向时作用于转向盘上的力,以提高其轻便性,常采用机械式液压助力转向、电-液助力转向和电动助力转向等动力转向系统[8]。最早使用电动助力转向技术,是在日本的小型车上。日本铃木公司在1988年2月第一次在Cervo上搭载了电动助力转向系统,紧接着,Alto车也搭载了这项技术 [9]。随后,电动助力转向系统技术进入了迅速发展的阶段。日本的大发、三菱、本田,美国的Delphi、TRW,德国的ZF等,都陆续推出了他们研发的EPS[10-11]。例如,大发公司在将电动助力转向系统搭载于Mira车上,三菱汽车公司则将EPS装在了Minica车上;本田的Accord目前也可以搭载电动助力转向系统。TRW从1998年开始把大量资源投入到EPS开发上。除EPS外,SBW(线控转向系统)也从1950年开始兴起。TRW最先提出使用控制信号来代替原有的机械传力结构[12]。随后德国的Kasselmann和Keranen研发了初期的线控转向模型。由于电子控制技术发展缓慢,直到1990年,线控转向技术才取得较大突破,科技大国们大量投入于研发和推广SBW,部分搭载线控转向系统的概念车型相继问世[13]。2013年,英菲尼迪公司的“Q50”成为首款搭载SBW技术的量产车型[14]。尽管 SBW 具有更加智能化、设计灵活性更高的优势,符合汽车技术的发展趋势,然而由于传统汽车采用机械转向系统,其技术相对于SBW更加成熟、稳定、安全,所以目前绝大多数乘用车仍然普遍采用传统的机械式转向系统[15]。
1.3 设计基本内容
1.3.1 基本内容
(1)合理选择转向器的结构型式;
(2)确定转向器、转向梯形机构等的选型及结构参数;
(3)转向操纵机构的设计计算;
(4)转向拉杆及前束调整机构的设计计算,完成工程图纸绘制和计算说明书。
1.3.2技术方案
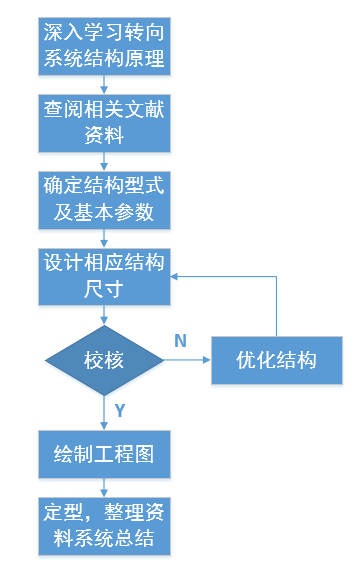 深入学习转向系统结构原理后,查阅相关文献资料,确定结构型式及基本参数,设计相应结构尺寸,进行校核,优化结构,绘制工程图,之后定型,整理资料,系统总结。技术方案流程图如图1.3所示。
深入学习转向系统结构原理后,查阅相关文献资料,确定结构型式及基本参数,设计相应结构尺寸,进行校核,优化结构,绘制工程图,之后定型,整理资料,系统总结。技术方案流程图如图1.3所示。
图1.3 技术方案流程图
第2章 转向器的选型及结构设计
2.1 转向器的选型
汽车转向系统中的最重要的机械部分,也就是转向器部分,经过一段长时间的发展,已经拥有非常成熟的技术。目前转向器部分主要采用的有齿轮齿条式转向器、循环球式转向器和蜗杆曲柄指销式转向器等几类[16]。
由于齿轮齿条式转向器结构简单、便于布置等优点,齿轮齿条式转向器在各中小车型上应用非常广泛。例如,一汽的红旗CA7220 型轿车、奥迪100型轿车等,都选择了齿轮齿条式转向器。
而其他类型的转向器,虽然都有其独有的优点,例如循环球式转向器,它的正效率非常高,使用寿命也普遍较长,但都有一定的缺陷。例如循环球式转向器,在正效率高的同时,逆效率也不低,会将路面的冲击力通过转向系统传递到转向盘上,发生打手现象。因此目前循环球齿条齿扇式转向器应用范围已越来越小,只有在低速汽车上才有应用[17]。所以,本次毕业设计拟选择齿轮齿条式转向器。
2.2 转向器的基本参数设计
2.2.1 已知设计参数
本次毕业设计针对紧凑型SUV的转向系统进行设计,故选用哈弗H5(欧风版)的车辆参数作为本次设计的设计参数。选用车型参数见表2.1。
表2.1 原始参数表
发动机型号 | 三菱4G63S4M | ||
型式 | 四缸、直列、水冷、单顶置凸轮轴、四冲程、多点电喷汽油机 | ||
缸径*行程(mm) | 85*88 | ||
排量(L) | 1.997 | ||
压缩比 | 10:01 | ||
额定功率及相应转速(kW/rpm) | 90/5250 | ||
最大转矩及相应转速(N·m/rpm) | 170/2500-3000 | ||
怠速稳定转速(r/min) | 750±50 | ||
最大净功率(kW) | 85 | ||
轮胎类型 | 无内胎子午线轮胎 | ||
轮胎规格 | 235/65 R17 | ||
轮辋规格 | 5°深槽轮辋 17*7J | ||
轮胎气压 | 230kPa | ||
车轮偏距 | 38mm | ||
车型 | 哈弗H5欧风版(SUV) | ||
型式 | 4*2 | ||
额定载客(人) | 5 | ||
整车整备质量(kg) | 1705 | ||
最大总质量(kg) | 2180 | ||
轴荷分配 | 空载 | 前轴(kg) | 875 |
后轴(kg) | 830 | ||
满载 | 前轴(kg) | 975 | |
后轴(kg) | 1205 | ||
外形尺寸 | 长(mm) | 4649 | |
宽(mm) | 1810 | ||
高(mm) | 1745 | ||
轴距(mm) | 2700 | ||
轮距 | 前(mm) | 1515 | |
后(mm) | 1520 | ||
最小离地间隙(mm) | 200 | ||
最小转弯直径(m) | ≤13 | ||
前悬(mm) | 899 | ||
后悬(mm) | 1050 | ||
接近角(°) | ≥22 | ||
离去角(°) | ≥27.5 | ||
四轮定位(空载) | 前轮前束(mm) | 0-2 | |
前轮外倾(°) | 0°±30′ | ||
主销内倾(°) | 12°30′±30′ | ||
主销后倾(°) | 3°30′±30′ | ||
主销偏移距(mm) | 16 | ||
2.2.2 齿轮基本参数的确定
齿轮齿条式转向器的选择的大多都是斜齿轮。因为与直齿轮啮合相对,若齿轮齿条式转向器采用斜齿轮啮合,运转平稳,冲击噪声小,同时,齿轮与齿条两轴线夹角可以适应总体布置的需要,降低了设计的难度。
通常在2到3毫米范围内选择斜齿轮的法面模数。而对于齿数,大多在5个齿到7个齿之间选择,压力角通常取20°,而斜齿轮的螺旋角取值多在9°至15°之间变化。按照转向轮转过最大角度时,齿条相应移动的行程需要达到的值,来确定齿条齿数。此外,在初步设计完成后,应分别对齿轮的抗弯强度和接触强度进行校核。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
![C:\Users\Mars\AppData\Roaming\Tencent\Users\502503801\QQ\WinTemp\RichOle\%_J2{GH_[]4XN1U~KNCME~E.png](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw3762_2020217105412275.png)