微型无人驾驶电动物流车总布置设计毕业论文
2020-02-17 10:54:42
摘 要
随着在世界范围内的汽车数量的迅速增长,汽车为人们的生活带来了方便,也造成了一系列如交通拥堵、交通事故频发等问题。本论文的目的是为了物流的可靠性和安全性,减轻物流人员和场地的压力,研究一种能载货自动驾驶的电动汽车,以实现自动驾驶汽车能够安全并准确地将货物运送到目标位置。
- 本论文阐述了微型无人驾驶电动物流车的研究意义、国内外无人驾驶电动物流车的现状。分析了对微型无人驾驶电动物流车的需求并进行设计。研究了无人驾驶电动物流车的动力性需求,并进行最高速度,最大爬坡度的计算,对电机的布置方法的优缺点进行了分析,选择。
- 在确定了驱动桥的型号与尺寸后,依据驱动桥所需电压,整车尺寸大小,选择合适大小的电池。根据整车需要以及车架的功用,零部件及电池包、控制器的空间需要,计算设计车架并仿真校核。
- 根据整车质量以及对悬架的要求,选择了前后悬架,结合转向,制动系统得出了整车总布置设计的方案,并绘制了整车的总布置图及外形设计效果图。
关键词: 无人驾驶;电动汽车;物流车;总布置
Abstract
With the rapid growth of the number of cars in the world, cars have brought convenience to people's lives, and have also caused a series of problems such as traffic congestion and frequent traffic accidents. The purpose of this thesis is to reduce the pressure on logistics personnel and the site for the reliability and safety of logistics, and to study an electric vehicle capable of driving and driving automatically, so that the self-driving car can safely and accurately transport the goods to the target position.
First, this paper expounds the research significance of micro-unmanned electric logistics vehicles and the status quo of unmanned electric logistics vehicles at home and abroad. The demand for miniature driverless electric logistics vehicles was analyzed and designed. The power demand of the unmanned electric logistics vehicle was studied, and the calculation of the maximum speed and the maximum grade was carried out. The advantages and disadvantages of the motor layout method were analyzed and selected.
Second,after determining the model and size of the transaxle, select the battery of the appropriate size according to the voltage required by the transaxle and the size of the vehicle.
Finally,according to the needs of the whole vehicle and the function of the frame, the space requirements of the parts and battery packs and controllers, calculate the design frame and simulate the check. According to the quality of the whole vehicle and the requirements of the suspension, the front and rear suspensions were selected, combined with the steering, the braking system was used to obtain the overall layout design of the whole vehicle, and the overall layout drawing and shape design renderings of the whole vehicle were drawn.
Keywords:driverless vehicle;electric vehicle;logistics vehicle; layout design
目 录
第1章 绪 论 1
1.1 研究背景及意义 1
1.2 国内外微型无人驾驶电动物流车发展现状 1
1.3 课题主要研究内容 3
第2章 总布置设计设计理论、设计方案 5
2.1 总布置设计内容及原则 5
2.2 设计理论 6
第3章 总体设计计算和驱动电机选型 7
3.1 整车数据确定 7
3.1.1 整车整备质量m0估算 7
3.2 驱动电机的选型 8
3.2.1驱动电机的功率 8
3.2.2驱动电机转速与转矩的选择 9
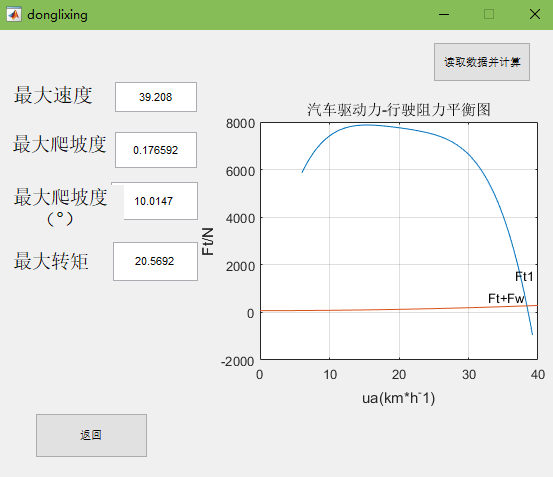
3.3 动力性计算GUI 11
第4章 底盘与车身的设计 13
4.1 车架的设计 13
4.1.1 微型无人驾驶电动物流车的轮距的确定 13
4.1.2 微型无人驾驶电动物流车的轴距确定 14
4.1.3 车轮的选型 14
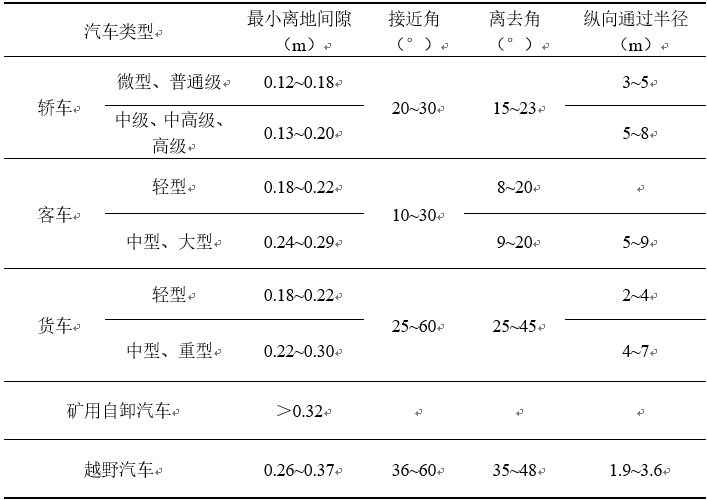
4.1.4微型无人驾驶电动物流车通过性参数 15
4.1.5 微型无人驾驶电动物流车的转弯半径 16
4.1.6 微型无人驾驶电动物流车的整车参数 16
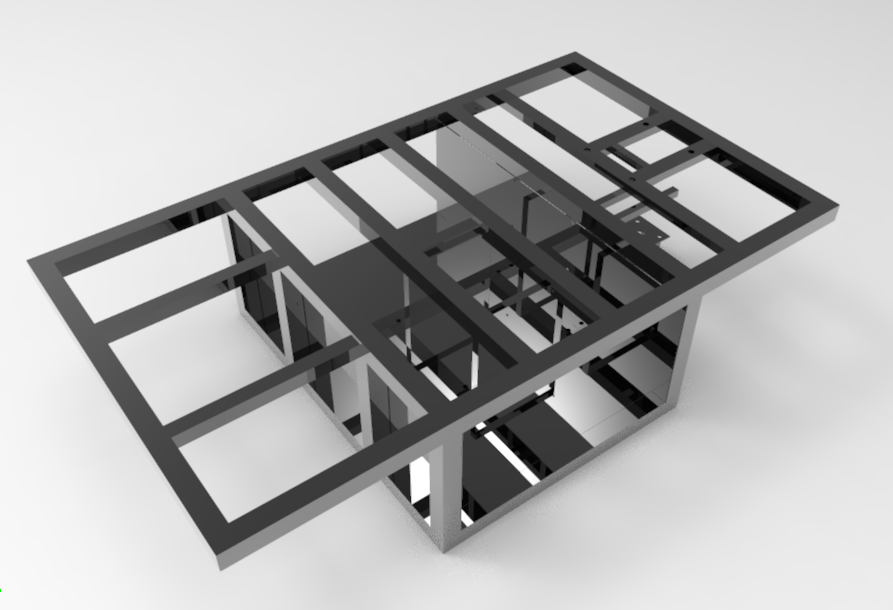
4.1.7 微型无人驾驶电动物流车的车架设计 17
4.2 悬架的设计 17
4.2.1前、后悬架静挠度与动挠度的计算 17
4.2.2 前后悬架的选取 18
4.3 车身的设计 21
4.3.1 车身尺寸的确定 21
4.3.2车身造型 22
4.4 车架有限元分析应力仿真 23
4.5 转向系统的布置 23
4.6 微型无人驾驶电动物流车外形 24
第5章 总结与展望 25
参考文献 26
附录A 28
致谢 30
第1章 绪 论
1.1 研究背景及意义
随着世界范围内汽车保有量的快速增长,汽车给人民的生活带来便利的同时也造成交通拥堵、交通事故频发等问题。据统计数据显示,每年大约有127万人死于交通碰撞事故,2000万至5000万人因碰撞收到非致命伤害。研究表明,导致交通事故的重要原因就是驾驶员注意力不集中或者驾驶经验不足等人为因素。而驾驶行为可预测性的自动驾驶汽车能依靠功能强大的传感器来感知车辆所处的周围环境,并利用传感器获得的车辆姿态位置、道路及障碍物等信息,规划出一条安全的道路轨迹,控制车辆的方向及速度,从根本上避免了众多交通事故的发生。
现代军队中士兵的负重越来越大,严重影响了单兵移动的灵活性,增加了士兵的疲劳感,而微型无人驾驶电动物流车可以缓解士兵压力,帮助士兵携带更多物资,让士兵更安全。
2018年,我国物流行业规模达 12 万亿,占 GDP 的 16 %。目前,有 500 万辆大货车用于 500 公里半径的干线运输;1000 万辆货车用于 50 公里半径区域运输;而在 5 公里半径的毛细物流领域,则有 3000 万辆微型车、三轮和两轮车在为电商物流和外卖市场服务。快递行业已经迈向高质量发展的新时期,但行业增速不及预期,随着人口结构的变化,我国人口红利优势正在下降,人力成本不断提升。
人口红利的消失给物流产业自动化带来了机会,而新零售的到来则对物流运输效率有了更高要求,为了让交通更加安全,物流更加迅捷高效可靠,研究微型无人驾驶电动物流车的总布置设计。
1.2 国内外微型无人驾驶电动物流车发展现状
由于无人驾驶的安全与高效,全球各国对于无人驾驶物流车越来越重视,国内外开发者也越来越多,从技术成熟度与应用上来讲处于领先位置的是美国。
Nuro于2018年1月揭示了它的第一款产品R1。R1是电动自动驾驶的本地商务运载工具。它的重量为1,500磅(680千克),高度仅为6英尺(1.8米),大约是轿车宽度的一半。该车辆仅设计用于运载货物,第一个车型可容纳12个食品袋。2018年8月, Nuro宣布与Kroger建立首个合作伙伴关系。该合作伙伴关系将测试杂货的完全自主交付。该试点项目于2018年8月16日在亚利桑那州斯科茨代尔的弗莱食品药店开张。
为了解决快递“最后一公里”的配送难题,众多电商企业巨头同时锁定了无人驾驶物流车,阿里菜鸟、京东、苏宁都纷纷开始加码对无人驾驶物流车的研发,百度也加速了研发微型无人驾驶电动物流车的进度。
新石器无人车的宽度、长度较小,为以往的一个微型SUV改造而成。载货空间大,通过性好,达到了以往设计的良好面包车的程度。可以24小时为用户提供颠覆性效率的运输服务,同时也为无人驾驶的技术迭代提供真实的数据。2018年7月开始商业运营,启动互联网运营平台并正式为用户提供服务。
以下表格是Nuro和国内先进微型无人物流车的对比。
公司 | Nuro | 新石器(百度) | 卧龙一号(苏宁) |
外观 |
|
|
|
发动机 | 纯电动 | 纯电动 | 纯电动 |
自动驾驶分级 | L4级别高度自动驾驶 | L4级别高度自动驾驶 | L4级别高度自动驾驶 |
车速 | 40千米/小时 | 20千米/小时 | 12千米/小时 |
感知定位技术 | 激光雷达,高清摄像机和无线电探测器,16线或32线激光雷达放置在车辆顶部,并在屋顶和车身周围安装8个或更多摄像机。 | 一种Velodyne多传感器融合定位方法,如16线激光雷达,前置双目摄像头,16个超声波雷达和RTK / IMU / V2X模块, | 多线激光雷达 GPS 惯性导航 |
电池与充电技术 | 续航4小时,最大脱离接触里程为1654.9千米 | 插拔式换电方案,支持24小时不间断运营,6.35kwh,18650松下电芯智能电池包的换电系统 续航5小时 | 续航8小时 |
载货技术 | 储物箱采用模块化设计 | 模块化的储物箱设计,提供更多选择,可为冷链服务 | |
尺寸 | 高1.8米,宽1.07米,长2.5米 | 高1.5米,宽1米,长2.5米 | 高1米,宽0.8米,长1米 |
底盘 | 精密设计的美国制造的车辆底盘 具有带动力的制动组件和制动器 所有关键系统冗余 双转向,双制动,双电源 | 欧洲L6e级轻电级底盘 麦弗逊式独立悬架 碟刹制动 | |
充满电行驶路程 | 160千米 | 100千米 | 96千米 |
覆盖范围 | 半径5千米 | 半径3千米 | |
装载量 | 113.4千克 | 2.4立方米 | 30千克 |



表1.1 国内外先进微型无人物流车对比
1.3 课题主要研究内容
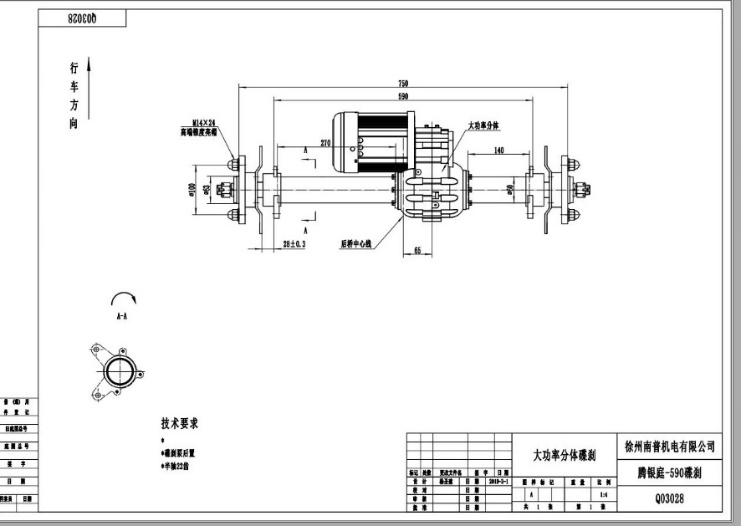
(1)确定微型无人物流车整体结构和基本尺寸,进行最高速度,最大爬坡度计算,计算确定汽车的最小转弯直径,汽车通过性参数,汽车行驶平顺性参数,制动性参数,据计算数据以及通讯要求,选择功率及尺寸合适的后驱动桥;
(2)根据驱动桥型号与尺寸,计算确定轮胎轮毂、转向节等底盘各零部件和总成的技术参数,并考虑实际成本,进行列表比较后,选择出最适合本车的底盘各零部件;
(3)依据整车尺寸大小,选择合适大小的电池;
(4)根据整车需要以及车架的功用,零部件及电池包、控制器的空间需要,设计计算车架,并校核车架的扭转刚度,车架的载荷工况及强度;
(5)设计计算车轮外倾角,主销后倾角,主销内倾角,主销偏移距,前轮前束,车轮定位参数的变化;
(6)根据整车质量以及对悬架的要求,进行前后悬架静挠度和动挠度的选择,悬架侧倾中心高度与轮距变化,侧倾角刚度的计算,以及汽车稳态转向时车身侧倾角及侧倾角刚度在前、后悬架上的分配,根据上述计算结果选择悬架类型为双横臂式独立悬架,根据整车尺寸,在螺旋弹簧和钢板弹簧之间选择螺旋弹簧加空气弹簧,并进行计算选型;
(7)进行车身外形设计,绘制整车总布置图,三视图,外形设计效果图。
第2章 总布置设计设计理论、设计方案
结合无人驾驶电动物流车的结构特点和环境要求,利用循序渐进的方式,确定一些关键尺寸因子,再进行全尺寸的布置。
2.1 总布置设计内容及原则
微型无人驾驶电动物流车总布置的设计应该满足运动空间需求、通过性、安装工艺间隙、碰撞安全和相关法规要求。
电动物流车的内部布置应该既防止运动干涉又提高空间利用率。把使用寿命短,维修频率高的零部件,如电机控制器等部件放在靠上的位置,便于拆装,把使用寿命长,维修频率低的零部件可放在靠下的位置[1]。
- 运动预留空间间隙和安装工艺间隙,零部件连接有刚性连接部件和柔性连接部件,刚性连接部件间最小间隙为10mm,柔性连接部件间最小间隙为15mm。其他零部件与电机的最小间隙为20mm,各部件线束插头拆装操作应留有A≥B 50mm的空间。
- 热害间隙,如是风冷的充电机、电机,则需满足保留热害间隙大于20mm。
- 最小离地间隙,汽车通过性必须得到满足,最小离地间隙为H≥L/30 50mm,其中L为轴距。
- 成本控制。冷却管路的布置需要尽量简化,在设计时要考虑管路的重复和折返。
布置原则,需要具体部件具体分析。
- 整车控制器,其发热较少,但对抗震和防水能力的需求较高,布置在震动小、防水好的位置较好;
- 电池管理系统,其发热较少,但对抗震和防水能力的需求较高,布置在震动小、防水好的位置较好;
- 电池,由于其对散热要求较高,应预留风道空间。电池的重量体积都较大,应布置在整车车身下方,使整车重心下移,并按设计前后轴载荷来布置电池的具体位置;
- 电机控制器,电机控制器需要预留走线空间,布置在上层较好;
- 驱动电机,此车驱动电机为风冷,电机与减速器是整体,需要考虑重心位置和CAN通讯线束的走线空间。
- 高压线束,高压线束需要被布置在比较隐蔽的位置,从车身和机舱的边沿通过,需要从系统、人员安全保护等方面综合考虑。为了方便拆装和维修,固定点间距应约为150mm,并保证线束的松弛度。
2.2 设计理论
微型无人电动物流车的总布置设计需要考虑各种零部件布置的因素,以及各种由散热、干涉等引起问题[2]。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: