无人物流车控制系统设计与开发毕业论文
2020-02-17 12:48:53
摘 要
随着物流行业的飞速发展,无人物流车以其灵活性、高效性和柔性在车间仓储物流系统中成为实现敏捷物料处理的重要工具。而随着计算机技术,自动化技术的不断进步,AGV控制系统方面的技术也越来越成熟。本文开展了对AGV控制系统的设计与开发,研究的主要内容包括以下几个方面:
- 介绍了本课题的研究背景及意义,分析了无人物流车在国内外的发展现状,引出了本课题的主要研究内容。
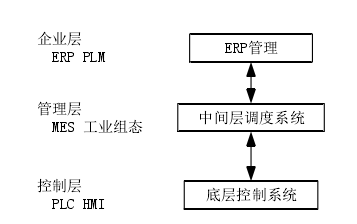
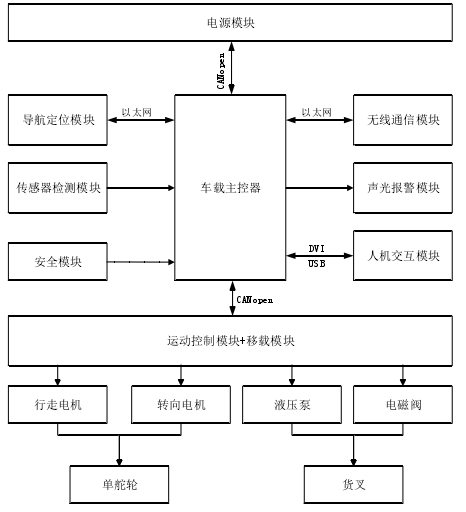
- 构建了无人物流车的总体框架,简要介绍了数字化工厂中自动化仓储系统的架构,各个部分的功能与联系,并将研究方向定位在底层控制系统上。分析设计指标,对舵轮驱动单元进行计算与选型,并建立了无人物流车车载控制系统架构。
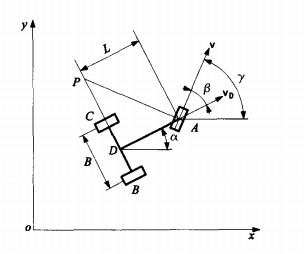
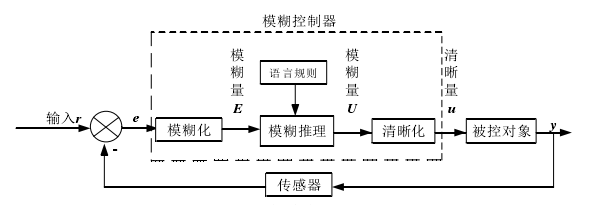
- 对无人物流车进行了运动学分析,建立了数学模型,并对其运动控制采用了模糊控制,用法向位置误差和方位角误差来控制舵轮转向角,用切向位置误差来控制舵轮速度,建立了相应的模糊规则后,进行了MATLAB仿真,其结果验证了模糊控制的可靠性。
- 对避障和导航算法进行了研究,避障采用人工势场法,导航采用A*算法,这两者的实质都是在进行路径规划,对设计算法的思想进行了解读,并用MATLAB将其结果呈现出来。
本文的特色在于对三轮AGV的运动控制采用了模糊控制,并建立了SIMULINK模型进行了MATLAB仿真,对避障控制采用了人工势场算法,对导航控制采用了A*算法,并且两种算法都进行了MATLAB仿真。
关键词:无人物流车;控制系统;模糊控制;人工势场法;A*算法
Abstract
With the rapid development of the logistics industry, unmanned logistics vehicles have become an important tool for agile material handling in the warehouse warehousing logistics system with its flexibility, efficiency and flexibility. With the continuous advancement of computer technology and automation technology, the technology of AGV control system is becoming more and more mature. This paper has carried out the design and development of the AGV control system. The main contents of the research include the following aspects:
1. Introduced the research background and significance of this topic, analyzed the development status of unmanned logistics vehicles at home and abroad, and introduced the main research content of this topic.
2. Constructed the overall framework of the unmanned logistics vehicle, briefly introduced the architecture of the automated warehouse system in the digital factory, the functions and connections of each part, and positioned the research direction on the underlying control system. Analyze the design indicators, calculate and select the steering wheel drive unit, and establish the vehicle control system architecture of the unmanned logistics vehicle.
3. The kinematics analysis of the unmanned logistics vehicle was carried out, the mathematical model was established, and the fuzzy control was adopted for its motion control. The steering angle and azimuth error were used to control the steering angle of the steering wheel, and the tangential position error was used to control the steering wheel. After the speed is established and the corresponding fuzzy rules are established, the MATLAB simulation is carried out, and the results verify the reliability of the fuzzy control.
The obstacle avoidance and navigation algorithms are studied. The artificial potential field method is used for obstacle avoidance and the A* algorithm is used for navigation. The essence of both is to carry out path planning, and the idea of how to design algorithm is interpreted, and MATLAB will be used. The results are presented.
The characteristic of this paper is that fuzzy control is adopted for the motion control of three-wheel AGV, and SIMULINK model is established for MATLAB simulation. Artificial potential field algorithm is adopted for obstacle avoidance control. A* algorithm is adopted for navigation control, and two algorithms are used. All have been simulated by MATLAB.
Key Words:unmanned logistics vehicle; control system; fuzzy control; artificial potential field method; A* algorithm
目录
第1章 绪论 1
1.1论文研究背景和意义 1
1.2国内外研究现状 2
1.2.1国外研究现状 2
1.2.2国内研究现状 3
1.3论文研究内容 4
第2章 无人物流车控制系统总体方案设计 5
2.1自动化仓储架构 5
2.1.1顶层ERP信息管理系统 5
2.1.2中层调度系统 6
2.1.3底层车载控制系统 6
2.2车载控制系统架构 7
2.3本章小结 9
第三章 运动控制系统模糊控制设计 10
3.1无人物流车运动学分析 10
3.2模糊控制概念 11
3.3无人物流车控制模型 12
3.4模糊控制的仿真及结论 17
3.4.1输入输出量模糊化 17
3.4.2模糊控制规则的建立 20
3.4.3解模糊化 22
3.4.4仿真与结论 23
3.5本章小结 24
第4章 避障控制算法设计 25
4.1避障算法概述 25
4.1.1模糊避障算法 25
4.1.2人工势场法避障 25
4.1.3栅格法避障 25
4.1.4遗传算法避障 26
4.1.5神经网络法避障 26
4.2人工势场法避障算法的实现 26
4.3算法的MATLAB仿真 27
4.4本章小结 28
第5章 导航控制算法设计 29
5.1导航算法概述 29
5.1.1 Dijkstra算法 29
5.1.2最佳优先搜索算法 29
5.1.3 A*算法 29
5.2 A*导航算法的实现 30
5.3算法的MATLAB仿真 31
5.4本章小结 31
第6章 总结与展望 32
6.1本文主要工作 32
6.2未来展望 32
参考文献 33
致谢 34
第1章 绪论
1.1论文研究背景和意义
随着我国经济不断腾飞,人民生活水平的提高,以及科技的不断进步,各种各样的智能设备开始出现在我们的生活中,这些智能设备能够在某些不适合人操作的高危环境里代替人进行工作。众所周知,在当今的工业社会里,在许多恶劣的环境下仍有许多工作采用人工操作,这很不利于人的身心健康,不符合人道主义。所以我们越来越需要那些具有准确性和稳定性的智能设备,来减小工作中的危险。智能设备除了应用于工业环境,它还能应用于那些技术含量低,如果由人操作极其简单的一些工作中。如果在这些简易的工作中投入太多的人力,将会使得生产力水平大大降低,企业的生产效率大打折扣。相反,如果多投入智能设备到这些岗位中,这不仅帮企业大大得节省了劳动力,还能使这些工作完成的更加精确与及时,可谓一举两得。因此,无人物流车,这一应用于自动仓储和短距离运输的智能设备,在这一大环境下应运而生。无人物流车属于智能汽车,而智能汽车是一个综合了自然环境感知,智能行为决策和多级辅助驾驶的一个智能化系统,是利用智能公路技术和多种传感器实现自动驾驶的智能设备,涉及的学科非常之广。
无人物流车也可以称之为自动导引车(Automated Guided Vehicle, AGV),其应用随着时代的发展也越来越广,常常在车间或者港口的货物物流运输方面有着非常重要的作用。根据相关资料我们知道,在一件产品的生产过程当中,它的纯加工时间只占到总体时间的5%,也就是说,它的原材料运输以及加工完之后的车间装卸以及运输到售卖地点的这些物流运输占到了95%。还有相关数据显示,一件产品劳动力价值在10%左右,而这件产品的存放以及物流运输成本却高达40%左右。这些数据无不告诉我们,要想节约产品的成本,解决它的运输问题是一个很好的入手点。在大部分的企业里,货物的运输主要还是依靠人工,这不仅需要大量的劳动力,而且其运输效率也不够高。AGV的出现能很好的解决这一问题,AGV在运输货物时,不需要人来操作,同时能高效率地完成系统所分配的任务。这样的工作模式无疑能给企业节省一大笔成本,提高企业的收益。在当今这个“工业4.0”时代,智能工厂这一新兴的名词开始被人们所广泛关注,智能工厂中的智能物流也是人们重点研究的对象之一。而对于我国来说,我国在2015年的政府工作报告中发表了《中国智造2025》,这表明,我国想从中国制造向中国创造进行改变,在这一大背景下,对各种智能化、自动化的产品的研究与开发显得尤为有必要。
研究无人物流车这一课题有着很大的意义,我国目前正面临着这样一个严峻的问题,人口老龄化不断加剧,这会样导致劳动力不足,而很多的工作需要人工去操作或者完成,无人物流车能很好的地解放人的双手。无人物流车能运用到需要货物搬运的很多领域,比如各大电商的无人仓库,货物装载的码头,3C电子产品的制造车间以及烟草生产车间。随着汽车行业的飞速发展,无人物流车开发的有关技术条件不断成熟,对无人物流车的研究也不断深入。一方面,研究无人物流车能减少人类的体力劳动,解放人的双手,提高企业的工作效率。另一方面,未来的汽车都趋于智能化,对智能车的研究对加速我国汽车的智能化也有很重大的意义和价值。所以说能研发出精准度高,稳定性强,通用性广的AGV控制系统是很值得去研究的一个课题。
1.2国内外研究现状
1.2.1国外研究现状
国外的AGV研究起步比较早,早在上世纪初的1913年,美国福特公司就研发出了一款由固定轨道导引的自动运货车,主要用在底盘制造车间去运送零件,这在当时是开创性的举动,这款自动运货机可以说是AGV的鼻祖。40年后的1953年,美国的barrett(巴雷特)公司开发出了一台真正意义上的AGV,该公司独立研发出了AGV控制器,其中采用的是真空管技术,该辆AGV由钢索来导引[1]。一年后的1954年,隔洋相望的英国传来好消息,他们做出了一台电磁导引式的AGV,电磁线埋在地下,也就是说这台AGV没有可见的实物轨道。在50年代末,AGV的使用开始在美国和欧洲推广。
在19世纪的60到70年代这段时间内,AGV的发展进入了飞速发展的阶段,这时Webb和Clark这两家公司迅速崛起,在AGV的市场取得了不错的份额[2]。在这期间,欧洲的AGV制造水平和相关技术也是突飞猛进地发展,这都要归因于欧洲对AGV的托盘尺寸和结构进行了规范化,这对AGV的研发和生产都带来了巨大的方便。在70年代中期的时候,欧洲的AGV总数量就达到了4800多台,相关的系统也高达520多种。到了1985年,欧洲的AGV保有量达到了惊人的一万多台,这个数字比当时的美国和日本都要多[3]。
瑞典是第一个把AGV与制造业完美结合的国家,在1973年,瑞典的VOLVO公司将AGV大规模的应用于汽车装配行业,取得了不错的经济收益。1990年,瑞典的NDC公司研发出了世界上第一台激光导引的AGV小车。1982年,同在欧洲大陆的德国研发出世界上第一台自动导引叉车[4]。
日本的AGV研究起步比较晚,在1963年才研发出第一台AGV。在1976年后,日本的工业水平开始迅猛发展,在这期间,出现了很多不同类型的AGV,到1990年的时候,日本的AGV保有量也超过了一万台。
国外甚至说是世界上最成功的AGV莫过于亚马逊的Kiva机器人,如图1.1所示。Kiva机器人的工作效率非常之高,它能在短短的1小时内完成300件货物的运输工作,大大降低了物流运输的成本,而且它的准确性也相当之高,高达99.99%。Kiva机器人是根据地上的二维码进行导航,其顶部的升降机构能抬起720磅的货物[5]。
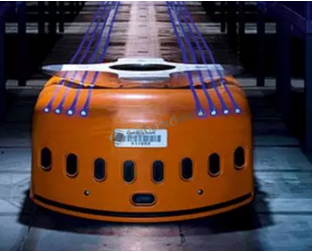
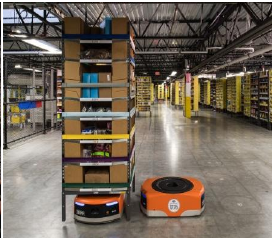
图1.1 亚马逊Kiva机器人
1.2.2国内研究现状
国内对于AGV的研究相对于国外来说比较晚,在1975年,北京起重运输机械研究所才研发出我国第一台AGV小车,这台小车采用的是电磁导引。1989年,我国第一台双向无线通信AGV在北京邮政科学研究规划院被研制出[6]。之后的1992年,天津理工学院研发出第一台光学导引的AGV,应用于核电站。国内的AGV发展大致分为了三个阶段,第一阶段是1991年至2000年,为AGV起步阶段,这段时间里中国的AGV公司很少,拥有自主的知识产权的更是屈指可数。第二阶段的时间是2000年到2012年,这段时间是AGV的平稳发展阶段,这段时间下AGV逐渐开始在很多领域得到应用,与之相对应的AGV企业也慢慢增多。第三阶段是2012年至今,即AGV的爆炸式发展阶段,AGV公司快速突破100家,市场逐渐饱和,AGV的应用更加全面,场景更加丰富。
我国电商的崛起一定程度上促进了AGV的发展,每到双十一等购物节,都是对物流行业的巨大挑战,各大电商先后建立了无人仓,以缓解货物运输的压力无人仓中的无人物流车的研发也是各大电商所关注的热点。2018年5月,阿里菜鸟与速腾聚创联合发布了全球首款固态激光雷达的无人物流车G Plus,该车搭载的固态激光雷达的型号为RS-LiDAR-M1Pre,共三台。这款激光雷达的性能十分强大,对障碍物的识别和感知十分精确,所以说它能在一些比较复杂的工作环境下工作。2016年9月,京东的首辆无人配送小车开始试运行,能够在一些小区或学校进行物流包裹的配送。苏宁的“卧龙一号”采用了融合激光雷达技术,定位精度也十分之高,3D感知功能也十分完善[7]。如图1.2分别为菜鸟的G Plus和苏宁的卧龙一号。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: