无人物流车定位与导航系统开发毕业论文
2020-02-17 12:49:26
摘 要
随着科技的日益进步,无人物流车被广泛应用于各类行业中,尤其是在制造业和仓储业中具有较好的表现,为了完成人们生产生活中的各项任务,迎合自动化、智能化的时代潮流,作为无人物流车关键技术,定位与导航系统的开发是研究的重点。但传统的定位与导航技术,如磁导航、光学导航、惯性导航等,受自身技术特点的限制,在某些场合下并非十分合适。而视觉导航技术的发展与进步,丰富了无人物流车定位与导航的解决方案,潜力巨大,本文设计了一种基于视觉SLAM的定位与导航方案,旨在满足无人物流车在运行过程中定位自身位置并完成对环境的探索的要求。
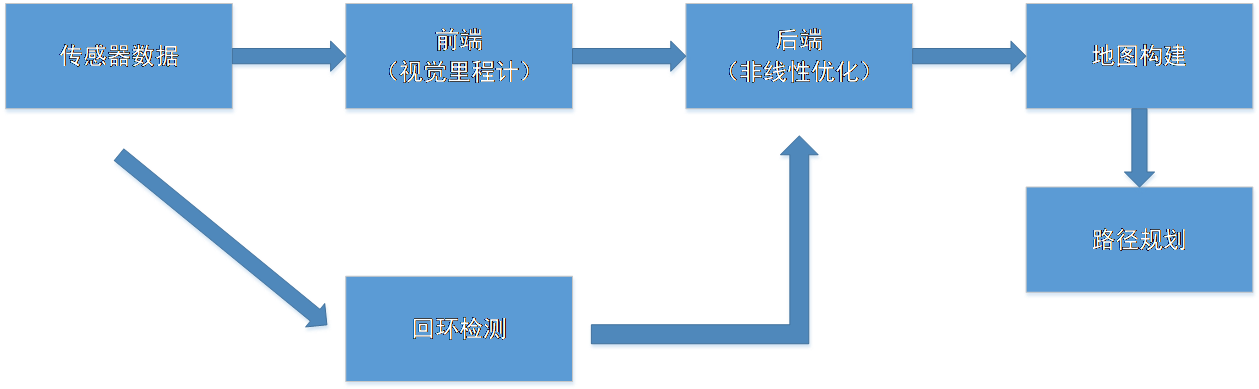
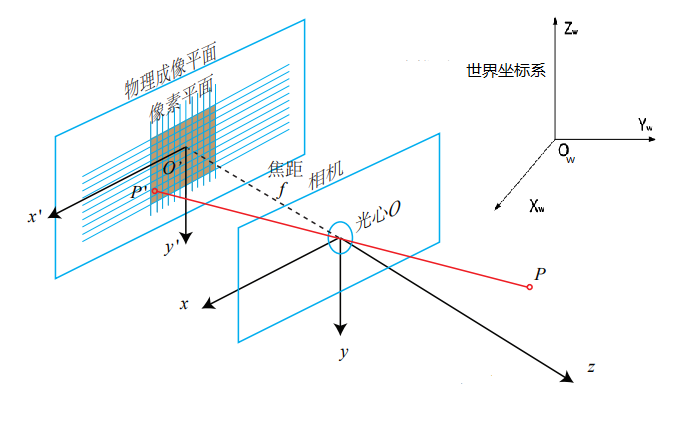
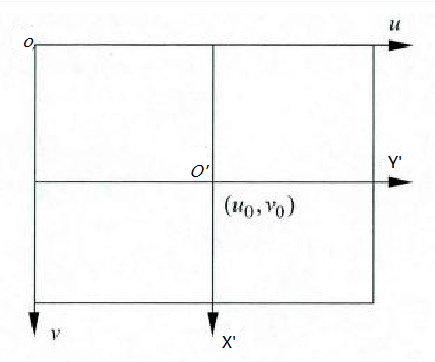
本文在经典的视觉SLAM框架下进行无人物流车定位与导航系统的开发,按照功能划分了前端的视觉里程计、后端的图像优化、回环检测以及后续的地图构建与路径规划模块,完成了定位与导航系统的总体方案设计。以RGB-D相机作为传感器,获取彩色图像以及深度图信息,作为对环境及其真实尺度进行还原的依据,并通过对相机成像原理的分析,推导得到了世界坐标系、相机坐标系、像素坐标系、像平面坐标系的转换关系,并基于ORB算法的点特征提取与匹配方案对图像进行处理,根据匹配点对之间最小汉明距离加入了筛选机制,降低了误匹配的概率。针对无人物流车的位姿估计问题,利用ICP/PnP算法对图像进行求解,加入了基于词袋模型的回环检测机制用于消除累计误差,并根据图优化理论利用g2o对位姿进行优化,提高了地图构建的精度,最后得到三维稠密点云地图和八叉树地图,并进行了路径规划方面的研究。
本文将视觉SLAM原理与无人物流车结合起来,通过对视觉里程计、后端优化、回环检测、地图构建模块的设计,针对性地完成了无人物流车位姿估计以及地图构建任务,完成了定位与导航系统的基本要求。
关键词:无人物流车;视觉SLAM;定位与导航;AGV;路径规划
Abstract
With the increasing progress of science and technology, unmanned logistics vehicles are widely used in various industries, especially in manufacturing and warehousing industries. In order to fulfill the tasks of people's production and life, cater to the trend of automation and intellectualization, as the key technology of unmanned logistics vehicles, the development of positioning and navigation system has naturally attracted much attention. However, traditional positioning and navigation technologies, such as magnetic navigation, optical navigation and inertial navigation, are not very suitable in some situations due to their own technical characteristics. The emergence of visual navigation technology enriches the solution of location and navigation of unmanned logistics vehicles, and has great potential. This paper designs a location and navigation scheme based on visual SLAM, which aims to meet the requirements of location and environment exploration of unmanned logistics vehicles in the operation process.
Based on the classical visual SLAM framework, this paper develops the positioning and navigation system of the unmanned logistics vehicle. According to the function, it divides the front-end visual odometer, back-end image optimization, loop detection, subsequent map construction and path planning module, and completes the overall scheme design of positioning and navigation system. The RGB-D camera is used as the sensor to obtain the information of color image and depth map, which is the basis of restoring the environment and its true scale. Through the analysis of the camera imaging principle, the transformation relations of the world coordinate system, camera coordinate system, pixel coordinate system and image plane coordinate system are deduced, and the image processing is carried out based on the point feature extraction and matching scheme of ORB algorithm. According to the minimum Hamming distance between matching points, a screening mechanism is added to reduce the probability of mismatching. Aiming at the pose estimation problem of unmanned logistics vehicle, ICP/PnP algorithm is used to solve the image, and a loop detection mechanism based on word bag model is added to eliminate the accumulated error. According to the graph optimization theory, the position and pose are optimized by g2o, which improves the accuracy of map construction. Finally, three-dimensional dense point cloud map and octree map are obtained, and the path planning is studied.
This paper combines the principle of visual SLAM with unmanned logistics vehicle. Through the design of visual odometer, back-end optimization, loop detection and map building module, the task of position and pose estimation and map building of unmanned logistics vehicle is completed, and the basic requirements of positioning and navigation system are completed.
Key words: Unmanned Logistics Vehicle; Visual SLAM; Location and Navigation; AGV; Path Planning
目 录
摘要 I
Abstract II
目 录 IV
第1章 绪论 1
1.1 课题的研究背景及研究意义 1
1.2 国内外AGV的研究现状 2
1.2.1 国外AGV的研究现状 2
1.2.2 国内AGV的研究现状 3
1.3研究内容 5
第2章 AGV定位与导航系统总方案设计 7
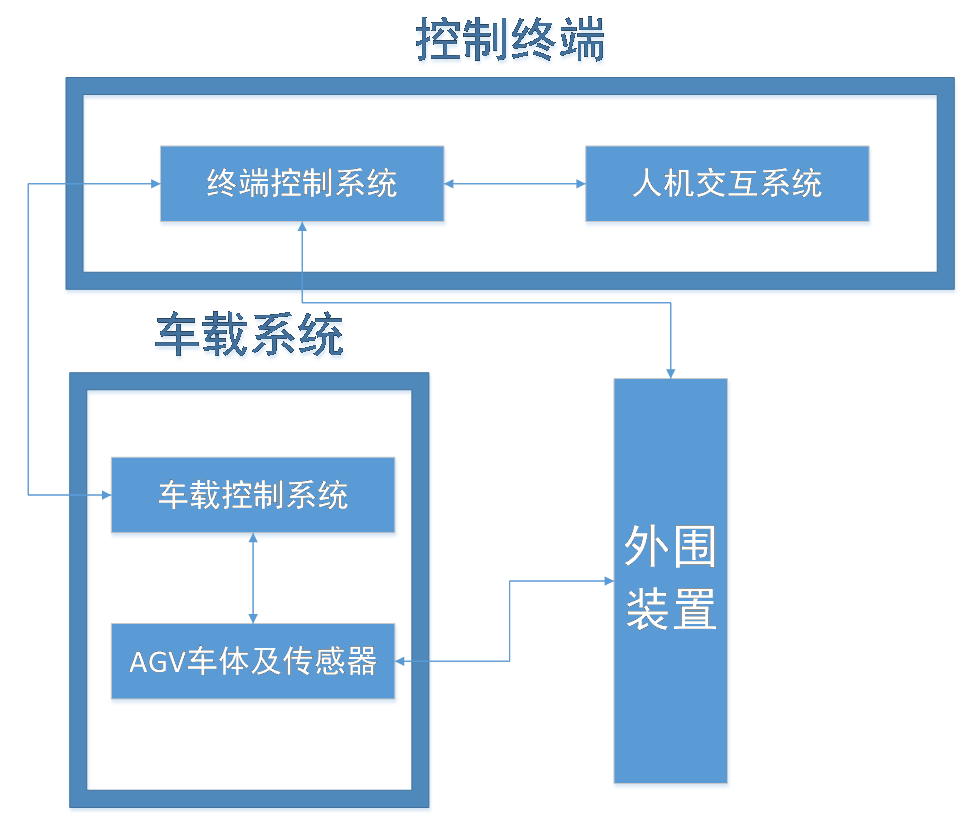
2.1 AGV系统架构 7
2.2 AGV定位与导航技术 8
2.3 基于视觉SLAM的定位与导航方案设计 9
2.4 本章小结 11
第3章 视觉坐标系与相机模型 12
3.1相机模型与坐标系定义 12
3.2坐标系转换关系 13
3.3本章小结 15
第4章 基于视觉的特征检测与匹配算法 17
4.1 基于点特征的传统检测提取方法 17
4.1.1 特征点 17
4.1.2 ORB特征 18
4.2 特征点匹配与筛选方法 20
4.3 特征点检测与匹配实验 21
4.4本章小结 23
第5章 AGV运动估计与地图构建方法研究 25
5.1 运动估计原理 25
5.2 PnP/ICP算法估计运动参数 26
5.2.1 PnP算法原理 27
5.2.2 ICP算法原理 28
5.3 后端优化 30
5.3.1 状态估计 30
5.3.2 图优化理论 31
5.3.3位姿图优化 33
5.4回环检测 35
5.4.1 概述 35
5.4.2 词袋模型 36
5.4.3 关键帧和回环验证 38
5.5 地图构建 39
5.5.1 概述 39
5.5.2 RGB-D稠密建图 39
5.6 运动估计与地图构建实验 41
5.6.1 运动估计实验 41
5.6.2 地图构建实验 44
5.7 本章小结 45
第6章 AGV路径规划方法研究 47
6.1 路径规划算法简介 47
6.2 AGV全局路径规划方法 48
6.3 AGV局部路径规划方法 49
6.4 本章小结 50
第7章 总结与展望 51
7.1 内容总结 51
7.2 研究展望 52
参考文献 53
致谢 55
第1章 绪论
1.1 课题的研究背景及研究意义
二十世纪七十年代开始,对移动机器人相关技术的研究开始兴起,相关产业不断壮大;近些年来,随着科技的快速发展与进步、经济的相对繁荣与兴盛,为了应对人们生产生活中日益壮大的各类需求,作为代替人工的载体,各种移动机器人被广泛应用于各大领域中,包括但不限于仓储物流领域、家庭服务领域、医疗健康领域、军事作战领域、建筑建设领域等,针对一个发展如此迅速、市场如此庞大的研究领域,各大国家都做出了了自己的战略布局。
早在2013年,作为世界制造业最为发达的国家之一的德国就提出了“工业4.0”的概念,其核心目的在于利用信息化的技术变革促使产业变革,而促成这一变化的一大重要现实基础便是“智能物流”的发展。作为整个自动化、智能化物流系统中的最关键一环,无人物流车的技术发展自然是重中之重。
中国与德国签署的《中德合作行动纲要》标志着渊源已久的中德合作进入了新的发展阶段。在《中德合作行动纲要》中明确指出,工业生产的数字化、信息化对未来中德双方的经济发展以及全面推进部署史诗制造强国战略具有重大意义,为此两国政府对这一方面的进程应予以政策支持,“中国制造2025”与“工业4.0”的联系更加的紧密,故与之相关的产业前景十分远大,无人物流车的发展也是中国抢占工业转型先机,从“制造”向“智造”转变的研究热点。作为自动化技术、电子与通信技术、传感器技术集成发展的代表之一,无人物流车未来在生产制造行业必将成为不可或缺的一部分。因为其代替了传统的人工搬运模式,在改善工作环境、解放生产力、优化生产结构、节约人力物力成本等方面具有极大的优势和潜力,相比与传统运输方式,无人物流车具有可操控性能强、事故率低、安全可靠、工作效率较高等优点,可以充分发挥柔性化生产的优势。
但目前存在的无人物流车的设计方案中,有些方案受到轨道、场地、空间的限制,不能充分体现其在自动化生产中的优点,所以近几年研究者对无人物流车的研究重点之一就是如何让无人物流车在无预设轨道的条件下实现自主导航,相关的技术也随之产生。针对这个问题,本文将研究环境设为室内,采用RGB-D相机作为主要传感器,在视觉SLAM的研究框架下完成无人物流车在无预设轨道情况下的自主定位与导航的问题,并针对噪声和回环检测做出优化,提高无人物流车位姿估计与地图构建的精度。
1.2 国内外AGV的研究现状
无人物流车作为AGV(Automated Guided Vehicle的缩写,意为“自动导引运输车”)的代表之一,是一种基于光学元件、机器视觉、惯性导航的等引导装置,并能够按照规划路径形式的具有各种运载功能的运输车。因其自动化、智能化程度较高,对人力资源的消耗大幅降低、随之带来的高效率、高安全性的生产方式,为柔性制造提供了重要途径。在许多场合,包括食品运输、医疗药品运输领域,由于减少的人员的参与,对环境的清洁要求和安全性的要求大大降低;在某些高危场合,甚至是代替人类进行作业的必要选择;而在制造业和仓储物流方面,AGV的优势就更加明显,据记载,最早在仓储行业中应用的AGV,可以追溯到1954年,美国的某家仓库中已经开始投入使用AGV,距今已有了半个多世纪的发展时间,为提高生产效率做出了巨大贡献。
1.2.1 国外AGV的研究现状
与国内AGV发展相比,国外的AGV发展历史要相对要悠久许多。美国福特公司于1913年最早采用了一款有轨导引小车用来运输汽车底盘,虽然这与现在的AGV定义不太相符,但已经初具雏形。20世纪20年代初,真正意义上的第一台AGV由美国Barret电子公司开发完成,这种牵引式的系统显著提高了当时的生产效率。不久后,英国的AGV技术在电磁导航方面做出突破并于1954年将第一台电磁导航AGV投入生产。20世纪后期,由于各大物流公司统一了托盘的尺寸结构与标准,AGV迎来了飞跃式的发展。1973年,瑞典沃尔沃公司开发出了计算机调度系统,用于控制各个生产装配线上的AGV。20世纪80年代后期,至少有上万台在欧美与日本地区投入使用。20世纪90年代,瑞典NDA公司研制了一款基于激光导引技术的AGV,与此同时,Egmin公司研制的激光与惯性导航方式相结合的AGV也为比利时AGV的发展开拓新领域。
纵观国外AGV发展现状,以欧美地区为代表的全自动AGV技术旨在完全追求自动化的AGV,以期达到尽量节约人力资源的目的,几乎适用于所有的搬运场合,但由于对技术和功能的追求,这种类型的AGV价格较为高昂。而以日本为代表的简易型AGV更加追求实用性,力求在最短时间内收回投资的成本,大多只强调搬运功能而不重视复杂的导航方式,技术含量较低但配套其强大的基础工业,日本地区的这种AGV的成本几压缩到了极限。
随着时代的发展,AGV的技术不断成熟,在各个领域都得到了广泛的应用。例如在全球最大的网络零售商亚马逊手里,就拥有着斥资7.75亿美元,从Kiva systems公司收购的基于二维码导航的仓储机器人技术,在它最大的物流中心仓储系统里,到处都能看到AGV的身影,如图1.1所示。

以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: