基于MATLAB的自动泊车控制算法与仿真研究毕业论文
2020-02-17 17:06:13
Wuhan University of Technology Graduation Design (Thesis)
Research on Automatic Parking Control Algorithm and Simulation Based on MATLAB
School: School of International Education
Specialty amp; Class: Automotive Engineering gj1502
Name: Li Jiayin
Tutor: Feng Zhiyong
Statement of Degree Thesis originality
I solemnly declare:The thesis submitted is the research result independently obtained by myself under the guidance of my tutor. Except for the contents specifically quoted in this thesis, this thesis does not include any other works that have been published or written by individuals or groups. I fully understand that the legal consequences of this statement are borne by me.
Author’s Signature:
Date:
Using Authorization of Thesis copyright
The author of this thesis fully understands the provisions of the school regarding the protection and use of thesis, and agrees that the school retains and sends copies and electronic versions of the thesis to the relevant thesis management departments or institutions, allowing the thesis to be viewed and borrowed. I authorize the provincial excellent bachelor thesis selection institution to compile all or part of the thesis into relevant data for retrieval. The thesis can be saved and compiled by photocopying, printing or scanning.
The thesis belong to 1、Confidentiality囗,Apply this authorization after the year of declassification)
2、No Confidentiality囗 .
(Please type “√” in above relevant block)
Author’s Signature: Date:
Tutor’s Signature: Date:
Abstract
With the increase of car ownership and the complex and crowded parking environment, it is difficult for drivers to complete the parking operation quickly and accurately, and even cause traffic accidents such as vehicle collision and road jam because of poor parking skills.The emergence of automatic parking system can help drivers parking safely and reduce the occurrence of safety accidents.
In this paper, the automatic parking process of an internal combustion locomotive with front wheel steering in parallel, vertical and skew parking spaces is studied by using MATLAB software, and the simulation is carried out. Firstly, according to vehicle parameters and obstacle avoidance constraints, the minimum parking space and parking starting position are calculated. Meanwhile, the path planning of parallel parking spaces is carried out by quintic polynomial, and the path planning of vertical parking spaces and skew parking spaces is carried out by quadric polynomial. Finally, fuzzy control algorithm and neural network algorithm are used to realize automatic parking.
Finally, the pre-operation, decision-making speed, correlation coefficient between input data and output data of the two algorithms are compared. Both algorithms need a lot of preliminary work. Fuzzy control needs to establish a fuzzy rule base, while neural network needs a lot of data training, so that the two control algorithms can complete automatic parking. The decision-making speed of the neural network algorithm is faster than that of the fuzzy control algorithm, and the correlation coefficient is larger. At the same time, the generalization ability of the neural network algorithm is better, and the requirement of the initial position and posture of the vehicle is lower.
Key words: Automatic Parking; Control Algorithm; MATLAB/Simulink; Fuzzy Control; Neural Network
Contents
Abstract Ι
Chapter 1 Introduction 1
1.1 The Background and Significance of Research 1
1.2 Research Status and Analysis of Automatic Parking System 1
1.2.1 Current Research Situation Abroad 2
1.2.2 Current Research Situation in China 3
1.2.3 Analysis of Automatic Parking System 6
1.3 Research Status of Parking Space Detection 7
1.4 The Main Research Contents of This Paper 8
Chapter 2 Calculation of Parking Parameters and Starting Position 9
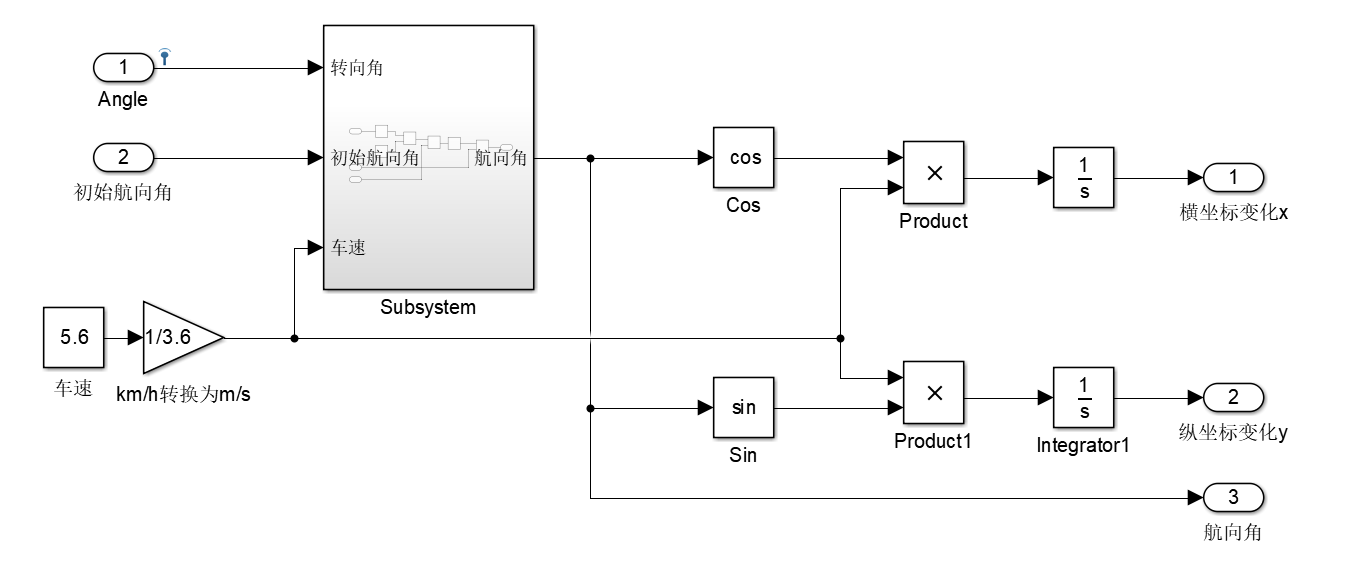
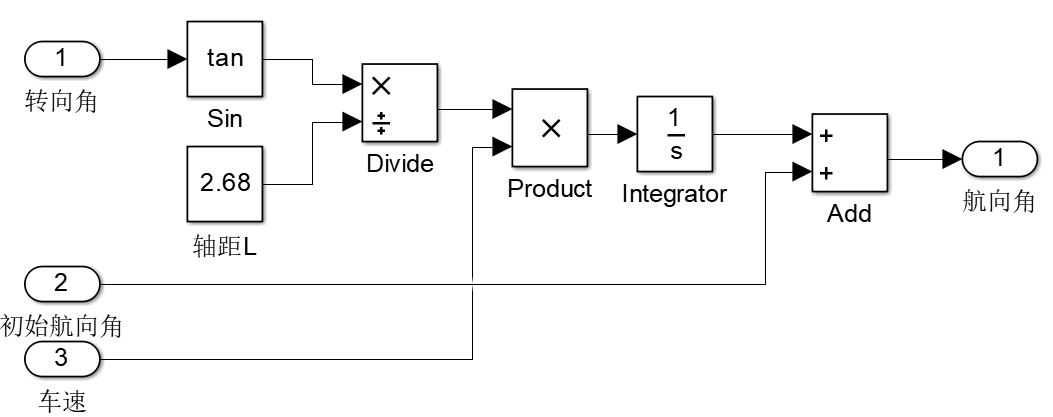
2.1 Establishment of Vehicle Kinematics Model 9
2.2 Parking Parameters Determination 11
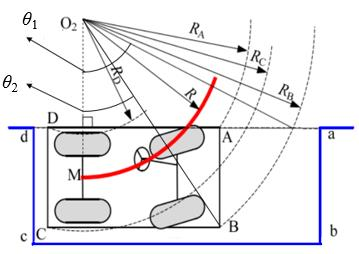
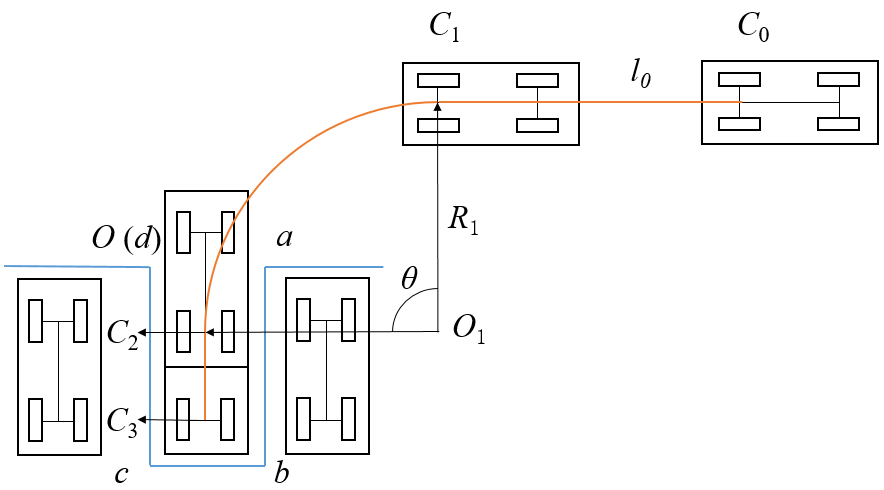
2.2.1 Calculation of Minimum Turning Radius in Reversing Process 12
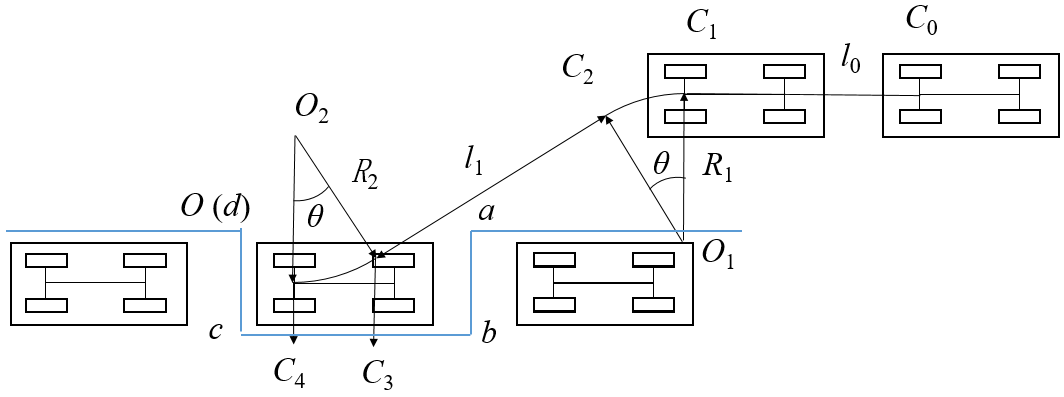
2.2.2 Minimum parking space required for parallel parking 13
2.3 Calculation of Starting Point Area in Parallel Parking Space 14
2.4 Calculation of Starting Point Area in Vertical Parking Space 17
2.5 Calculation of Starting Point Area in Skew Parking 20
2.6 Summary 22
Chapter 3 Path Planning of Automatic Parking System 24
3.1Parallel Parking 24
3.1.1 Parallel Parking Path Planning 25
3.1.2 Simulation of Parallel Parking Path 26
3.2 Vertical Parking 29
3.2.1 Vertical Parking Path Planning 29
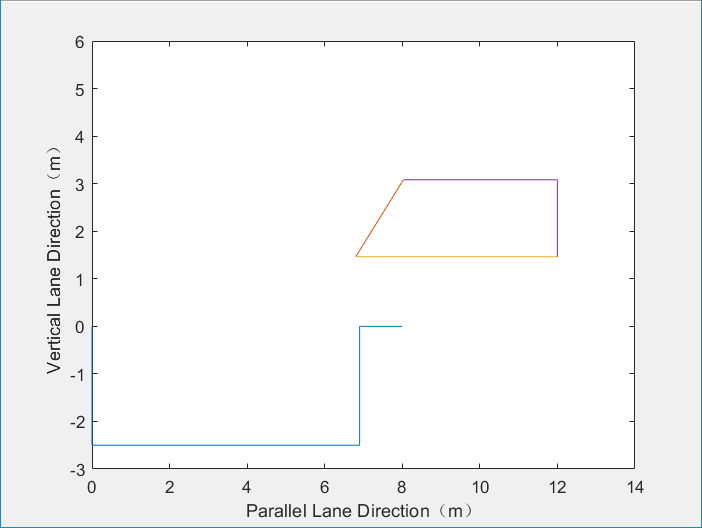
3.2.2 Parking Path Simulation of Vertical Parking Space 30
3.3 Skew Parking 33
3.3.1 Parking Path Planning for Skew Parking 33
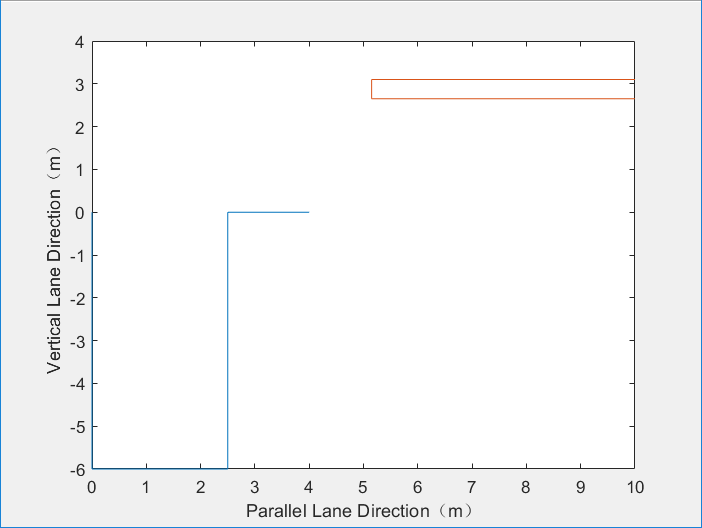
3.3.2 Parking Path Simulation of Skew Parking 36
3.4 Summary 38
Chapter 4 Design and Simulation of Fuzzy Control Algorithms 39
4.1 Basic Principles of Fuzzy Control Algorithms 39
4.2 Design of Fuzzy Controller 41
4.3 Path Tracking Simulation 46
4.4 Summary 63
Chapter 5 Design of Neural Network Control Algorithms 64
5.1 Basic Principles of Neural Networks 64
5.1.1 Working Principle and Structure of Neurons 64
5.1.2 Working Principle and Structure of Neural Network 65
5.2 Establishment of Neural Network Model 67
5.2.1 Data Acquisition of Neural Network Training 67
5.2.3 Establishment of Hidden Layer Model of Neural Network 70
5.2.3 Selection of Neural Network Training Algorithms 72
5.2.4 Establishment of an Automatic Parking Model Based on Neural Network 73
5.3 Summary 78
Chapter 6 Comparing and Evaluating Algorithms 79
6.1 Preliminary Work Contents of Two Algorithms 79
6.1.1 Preliminary Work Content of Fuzzy Control 79
6.1.2 Preliminary Work Contents of Neural Networks 80
6.1.3 Comparison 81
6.2 Decision Speed of Two Algorithms 81
6.3 Relevance Coefficient of Simulation Results of Two Algorithms 81
6.4 Summary 82
Chapter 7 Summary and Prospect 83
References 85
Appendix 88
Appendix A1.1 88
Appendix A1.2 88
Appendix A1.3 88
Appendix A1.4 88
Appendix A1.5 89
Appendix A1.6 89
Appendix A1.7 90
Appendix A1.8 91
Appendix A1.9 91
Appendix A1.10 91
Appendix A1.11 92
Appendix A1.12 92
Appendix A1.13 92
Appendix A1.14 92
Appendix A1.15 93
Appendix A1.16 95
Appendix A1.17 98
Acknowledgement 102
Chapter 1 Introduction
1.1 The Background and Significance of Research
According to statistics released by the Traffic Administration Bureau of the Ministry of Public Security, by the end of 2018, China had 240 million automobiles. In 2018, China’s automobile production and sales were 27.0892 million and 28.0806 million, respectively, a decrease of 4.16% and 2.76% over the same period of last year. The China Automobile Industry Association pointed out that the overall operation of the automobile industry is stable, which means that the number of automobiles will continue to increase in the future. With the increase of car ownership, various problems have become increasingly prominent. The problem of parking difficulty is particularly prominent. Complex and crowded parking spaces and inexperienced parking skills of drivers will lead to vehicle collisions and even road congestion and other traffic accidents.
In the face of complex and crowded parking environment, it is difficult for drivers to complete the parking operation quickly and accurately. Therefore, the research of automatic parking technology to solve the parking problem has attracted much attention. The automatic parking in this study means that the parking space does not need manual control. This research can promote the development of the automobile industry towards intellectualization and networking. At the same time, it can improve the safety of automobiles and reduce traffic accidents through intellectualization and networking, thus meeting the needs of consumers for more on-board functions. Because automatic parking technology can improve parking efficiency, reduce the operating burden of drivers, reduce the occurrence of vehicle collision accidents and improve driving safety.
1.2 Research Status and Analysis of Automatic Parking System
As for the research of automatic parking technology, with the continuous research of scholars at home and abroad, the road planning methods and control methods of automatic parking have achieved certain results.
1.2.1 Current Research Situation Abroad
Foreign scholars have paid much attention to the problem of parking difficulty earlier. In 1990, foreign scholars Murray and Stary [1] began to study the problem of parallel parking. Moshchuk and Chen [2] studied the path planning algorithm of single-cycle and double-cycle parallel parking. First, the turning center was deduced based on vehicle configuration, then the strategy of one and two parking turning path planning was formulated according to parking micro-level. Finally, CarSim simulation was carried out to verify the correctness of the design. C. Martnd et al. [3] proposed a fuzzy decision-making system for automatic parking lot. The system’s modeling, the fuzzy set of language variables and the reasoning rules were explained. Then different fuzzy operators were tested in the simulation environment, and the effects of different fuzzy strategies on the decision-making system were obtained. Xing Xiong and Byung-Jae Choi [4] discussed the design of intelligent parking system based on genetic algorithm, which is a search strategy based on evolutionary model. The algorithm makes the design simpler and more effective. Scholars such as Chen-Kui Lee [5] proposed a control scheme for vehicle parking tasks. This parallel parking control scheme uses genetic algorithm to determine the parking location, uses Petri net to replace the traditional decision flow chart and plans the parking route, and uses fuzzy logic controller to control the optimal parking route. Bo Su and other scholars [6] proposed a method of regionalization of secondary parallel automatic parking terminal based on genetic algorithm to improve the precision of parallel parking in narrow space. The simulation on MATLAB verified the feasibility of the method. Yin Yin Aye et al. [7] developed an image-based automatic fuzzy controller to optimize the parameters of the membership function of the automobile movable robot automatic parking system. The genetic algorithm was used to adjust the controller. The simulation results show that the scheme is effective. Jiangchao Shi and other scholars [8] designed an automatic parking system based on multi-point preview theory, built vehicle kinematics model based on Akman steering principle, analyzed the working conditions of parallel parking, established the constraints of parking trajectory, proposed a sinusoidal reference trajectory, and verified the effectiveness of the proposed automatic parallel parking algorithm through simulation and vehicle test based on DYNA4. Wontaek Lim and other scholars [9] studied the path planning algorithm based on turning standard line (TSL) for narrow parking lot. The algorithm uses turning standard line to plan the Bessel curve of continuous quadratic equation. A series of curves from the starting point to the target position create a continuous parking path. Sampling technology is used to find the optimal path. Through imitation of different parking environments, the algorithm uses turning standard line to plan the Bessel curve of continuous quadratic equation. It proves the effectiveness of the planning algorithm and is suitable for narrow parking lots. Dezhao Zhang et al. [10] proposed an arc tangent polynomial trajectory model. Using genetic algorithm, the optimal trajectory of parallel parking was obtained, which ensured that the vehicle did not collide with obstacles or other vehicles during parking. Because all vehicle parameters and parallel parking spaces were parameterized, the algorithm had strong robustness. Emese Szadeczky-Kardoss and Balint [11] introduced the two main components of Automatic Parking Assistance System (APAS). APAS draws the environment of the vehicle, detects whether there are available parking spaces, plans feasible parking paths and closed-loop tracking paths, controls the speed of the vehicle and the controller to determine the steering wheel angle. The steering wheel angle is real by Electric Power Steering System (EPAS).Now.Jing Deng et al. [12] In this paper, an adaptive proportional integral derivative neural network constrained control method based on radial basis function neural network model identifier is proposed for automatic parking system. The parameters of the neural network controller are adjusted online by using Jacobian matrix knowledge. This method has better adaptability. Finally, the stability score based on Lyapunov function is adopted.The convergence of the control algorithm is proved by analysis.
1.2.2 Current Research Situation in China
Compared with foreign countries, domestic research started relatively late, but some research results have been achieved. Academician Guo Kong-hui of Jilin University and other scholars [13] built the kinematics model of a car by using MATLAB/Simulink software. At the same time, according to the steering characteristics of the vehicle, combining the fuzzy control theory with the driver’s professional experience, the parking controller was designed and simulated in Simulink to verify the feasibility of the fuzzy control algorithm. Xu Jinjin [14] adopted the bi-directional planning method in the study of vertical parking, simplified the algorithm of path planning, and improved the parking safety through the simulation of MATLAB software. Jiang Hui [15] improved the disadvantage of parking control strategy based on fuzzy logic control theory by using path planning and adaptive neural network. According to the kinematics and low-speed steering characteristics of vehicle backing, the backing model and backing environment of vehicle were built by using MATLAB/Simulink software, and the feasibility of the backing control strategy was verified by simulation. Liu Zhouhui [16] summarized the representative research situation in the field of vehicle automatic parking technology, compared and analyzed different vehicle parking control methods, and established the extended vehicle kinematics model in MATLAB/Simulink, and established the automatic parking system model based on fuzzy control by using the fuzzy control toolbox of MATLAB. The correctness of the control method was verified by simulation. Cheng Kunpeng and Chen Hui [17] put forward a path following strategy which combines lateral and longitudinal motion control modules. The actual vehicle test results show that the tracking error of the control strategy will be controlled within 7 cm. Qulong [18] establishes the mathematical model of the low-speed backing process of vehicles, and establishes a fuzzy control method for the parking process from the optimal parking position to the parking space. The parking process is simulated by MATLAB. Yang Hao [19] studied the parking method of two arc locus according to the specific vehicle type. Using MATLAB/Simulink software, the simulation model of parallel parking fuzzy control system based on tangent two arc locus was established, and the parallel parking of two arc locus was further recognized by simulation.Huayiding et al. [20] designed an auxiliary parking control system controller based on voice prompt. Through the actual parking test, the parking system can help the driver to operate the parking quickly and accurately, which verifies the reliability and validity of the designed auxiliary parking controller. Hou Xiaoyang and other scholars [21] put forward one-way multiple and two-way multiple path planning methods, and used MATLAB software to simulate and verify the two path planning methods to establish parking trajectory equation. The results show that the two path planning methods can make parking in small parking spaces which can not meet the requirements of parallel parking safely and smoothly.Wu Kai and Liang Hexi [22] established the dynamic model of parking process, and used MATLAB software to simulate the parking trajectory to verify the feasibility of the simplest parking and unequal radius parking. Through comparative analysis, the unequal radius parking algorithm is more in line with the actual demand, and the requirement for the choice of the starting position of the car is simpler.Wen Zongzhou et al. [23] proposed a kinematics model based on fuzzy control and automatic parking, established a simplified fuzzy rule base, applied learning algorithm to optimize the parameters of fuzzy control of automatic parking system, shortened the parking time and realized the optimal control of automatic parking through the learning ability of the system.Yu Zhuoping [24] proposed that the convex optimization theory be taken as the core to unify vehicle motion constraints, physical constraints of vehicle actuators and environmental constraints, and construct the optimal objective function of autonomous parking path planning. The interior point method was used to solve the problem, and the parking path satisfying vehicle kinematics was planned to meet the parking requirements of different angles in the process of autonomous parking.Wu Zhongwei [25] establishes Simulin model of path planning and terminal sliding mode path tracking controller based on reaching law and Carsim model of target vehicle. Combining with actual hardware conditions of target vehicle, the hardware control system of automatic parking is built. The software development process of upper controller based on Simulink is designed, and parking experiments are carried out to verify the B-spline curve.The rationality of route planning method and the control effect of terminal sliding mode path tracking controller based on reaching law are discussed. Xiong Lu and other scholars [26] designed the automatic parking decision-making planning algorithm and the warehouse position tracking algorithm to solve the problem that the automatic parking algorithm requires higher initial position and posture of vehicles, so that the algorithm does not require the initial position and posture of vehicles, while ensuring the ideal final parking position and posture. Simulink and PreScan joint simulation validated the effectiveness of the algorithm.Wu Bing and other reverse[27] path analysis parallel parking process, get the possible collision points during parking process and calculate the minimum parking space, replace the initial point of traditional path planning with the initial area of parking, collect the data of parking process in real vehicle test, use different data samples for particle swarm optimization RBF neural network, avoid the analysis of multiple constraints such as safety distance.The proposed parking path can be well applied to the actual parking process. The simulation results and the actual parking tests show that the parking success rate of the path generated by the seven methods is higher.Jiang Libiao and Yang Jie[28] proposed a path planning algorithm based on B-spline curve and a sliding mode path tracking control algorithm based on reaching law for the existing automatic parking system, which ignores the actual vehicle steering constraints and initial position and posture conditions. Simulink and CarSim simulation were used to verify the rationality of the path planning.Sex and the effect of path tracking controller.Qian Chenghui et al. [29] designed an automatic parking system model based on ultrasonic ranging. Using ultrasonic ranging technology and video acquisition technology to obtain the surrounding environment data, analyzed the car motion model, combined with the actual design of vertical, parallel and oblique three kinds of parking fuzzy controllers, and carried out simulation and verification in Simulink of MATLAB, after testing, when the model car.When the heading angle of the model car is in the range of - 32 ~ 32 degrees, the autonomous parking of the model car in the garage of 0.92 times the standard size model is realized.In order to learn from the parking experience of drivers, Liu Song and others[30] put forward a method of automatic parking motion planning based on artificial neural network. By training the neural network, outputting steering wheel angle and speed commands to complete parking, it is proved that the neural network can learn from the parking experience of drivers and guide the vehicles to complete parking in the garage.Finally, the validity of the method is verified by the joint simulation experiments of MATLAB/Simulink and CarSim, and the real-time performance is verified by hardware-in-the-loop simulation.
1.2.3 Analysis of Automatic Parking System
Automatic parking system has been gradually applied to some vehicles as a high-end configuration.Automation currently commonly used.
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: