城市SUV前轮转向系设计毕业论文
2020-02-17 17:09:21
摘 要
近年来随着驾驶需求的提高,对转向系统的要求也越来越高,电动助力转向系统由于其节能环保,工作效率高,结构布置简单等优点,已经逐渐替代传统的机械式和液压式转向系,应用于越来越多的车型上。本次设计选择车型为长城哈弗H6 2019款,介绍了电动助力转向系统对比液压助力转向的优点,概述了其国内外研究现状、助力转向的工作原理和主要组成部分,对助力部分关键零件进行了选型,并选定了电动助力转向系统的布置形式和齿轮齿条式转向器的结构形式,主要针对齿轮齿条式转向器和蜗轮蜗杆减速机构进行了设计校核,提出了转向传动机构的优化设计方法,最后根据设计参数运用CATIA软件进行了三维建模,绘制了二维转向系装配图和主要零件图。
关键词:电动助力转向系统,齿轮齿条式转向器,蜗轮蜗杆,转向传动机构
Abstract
In recent years, with the increase of driving demand, the requirements for steering system are getting higher and higher. Electric power steering system has gradually replaced the traditional mechanical and hydraulic steering system and been applied to more and more vehicles due to its advantages of energy conservation and environmental protection, high work efficiency and simple structure layout. This design choice models for the Haval H6 2019 model, this paper introduces the electric power steering system compared to the advantages of hydraulic power steering, summarizes the research status at home and abroad, working principle and the main part of the power steering, power part of the key parts for the selection, and selected the decorate a form of electric power steering system and the structure of gear and rack type steering gear, mainly for gear rack type steering gear and worm gear and worm reducer for the design, put forward the optimization design method of steering transmission mechanism, according to the design parameters of 3 d modeling using CATIA software, The assembly drawing and main part drawing of two - dimensional steering system are drawn.
Key Words: Electric power steering system, rack and pinion, worm and worm wheel, steering mechanism
目 录
第1章 绪论1
1.1转向系统简介1
1.2国内外研究现状1
1.2.1国内发展状况1
1.2.2国外发展状况2
1.3研究目的及意义3
1.4本章小结3
第2章 电动助力转向系统4
2.1电动助力转向系统的组成4
2.2电动助力转向系统的工作原理4
2.3助力转向部分的组成部件4
2.3.1电动机4
2.3.2扭矩传感器5
2.3.3电磁离合器5
2.3.4减速机构5
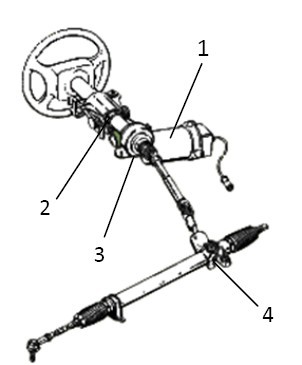
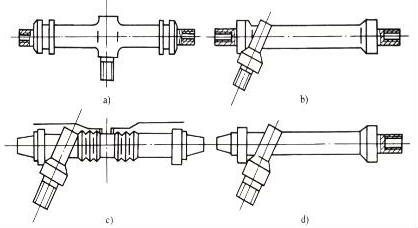
2.4电动助力转向系统的布置方案6
2.4.1转向轴助力式6
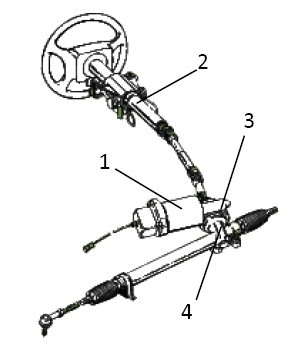
2.4.2齿轮助力式7
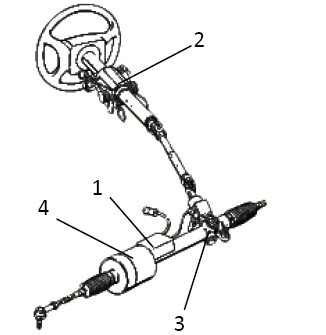
2.4.3齿条助力式7
2.5汽车参数的确定8
2.6本章小结8
第3章 齿轮齿条转向器与减速机构的设计9
3.1齿轮齿条转向器的方案选择9
3.2电动机参数的选择10
3.3齿轮和齿条的设计计算13
3.3.1齿轮和齿条基本参数的确定13
3.3.2齿轮的接触疲劳强度校核14
3.3.3齿轮的弯曲疲劳强度校核16
3.4蜗轮蜗杆减速机构的设计计算17
3.5本章小结18
第4章 转向传动机构的优化设计19
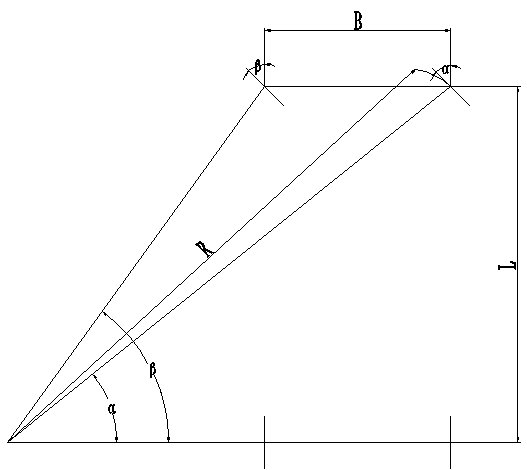
4.1转向传动机构布置形式19
4.2内、外轮实际转角关系20
4.3优化设计方法22
4.3.1建立目标函数22
4.3.2设计变量与约束条件24
4.3.3优化计算过程25
4.4本章小结26
第5章 三维模型的建立27
5.1转向盘27
5.2转向轴27
5.3蜗轮蜗杆28
5.4齿轮齿条29
5.5转向系装配体30
5.6本章小结30
总结31
参考文献32
致谢33
附录34
第1章 绪论
1.1 转向系统简介
经过一百多年的高速发展,汽车产业已经成为现代文明的重要组成部分,并随着社会的进步,个性化的需求,环境的改变而不断发展改进,各系统和零部件也在进行着革新和优化。转向系作为汽车必不可少的组成部分之一,功用是使驾驶员能根据路况的变化按照个人意愿改变或保持汽车的行驶方向,其性能的好坏直接影响到汽车的操纵稳定性,行驶安全性以及用户的驾驶体验,特别是在高速化,车流密集化,驾驶员水平不同的情况下,其操纵设计变得格外重要。各企业和科研机构也在不断对转向技术进行革新,以满足用户日益提高的需求。转向系主要分为机械转向和动力转向两大类,为了减轻驾驶员的操纵负担,提高轻便性,传统的机械转向已经难以同时满足转向轻便和转向灵敏的要求,目前大多采用动力转向技术。主要的转向技术有液压式、电控液压式、电动助力式、四轮转向式、主动前轮转向式和线控转向式。由于技术要求和成本的限制,四轮转向,主动前轮转向和线控转向的应用范围有限,目前市面上主要采用液压式和电动助力式。液压式动力转向以液体的压力作为转向辅助动力,其油液工作压力高,油液的阻尼作用可吸收路面冲击,转向动力缸结构尺寸小,结构紧凑。而电动助力转向利用电动机提供的动力辅助转向,与液压式相比,其机械部分直接与电动机相连,传动效率更高:助力部分(电动机,传感器,离合器等)结构简单,质量轻:不需要油泵、油管等部件,系统整体尺寸小,便于布置:而且液压泵在发动机运转时始终在保持工作,消耗发动机功率,同时存在油液泄露等问题,电动助力式的助力部件电动机可独立于发动机工作,仅在转向需要助力时运转,基本不直接消耗发动机燃油,对环境污染小,并可运用于纯电动汽车上。这些优点的存在,使得电动助力式转向系统适用于越来越多的车型,未来也能得到更好的发展。本次设计为电动助力转向系统。
1.2 国内外研究现状
1.2.1 国内发展状况
我国助力转向系统起步较晚,汽车电子行业发展相对滞后,但是,随着汽车能源的大量消耗,人们对汽车环保、节能和安全可靠性的要求进一步提高,更加符合使用需求的电动助力转向系统迎来了良好的发展前景。目前,国内许多科研机构,大学院校和企业都在对EPS技术进行研究和设计,这项技术也越来越多地运用到市面上的各类车型上。
中北大学的裴学杰等人抓住助力特性曲线的特点,分析研究了电动助力转向系统的控制策略。结合EPS的数学模型,分析其助力控制,阻尼控制和回正控制策略,确定目标电流,对控制策略进行仿真,获得的实验结果与实际情况误差很小,可知EPS系统确实可以使驾驶员获得良好的路感和驾驶轻便性[1]。马方杰为了证明PID控制理论在EPS系统上运用的可行性,结合MATLAB模糊工具箱和模糊控制理论对助力特性曲线进行了设计,使用PID控制理论,使系统保持良好的可靠性和鲁棒性,编写程序实现了PID算法[2]。王峰发现传统PID控制参数固定不变的特点并不适用于EPS非线性、时变性强的回正控制情况,提出了一种准滑模变结构控制方案,通过simulink仿真发现该准SMC控制能使方向盘避免出现回正过度和不足的问题,快速准确的回正,给驾驶员带来更好的操纵体验,进一步提升车辆操纵稳定性[3]。吴志敏对EPS系统中的扭矩传感器进行了设计研究,他发现响应快的光电式传感器对光码盘要求高,电位计式传感器测量精度有限,提出了一种非接触式的扭矩传感器,原理是将磁通量的变化通过霍尔元件转变为电压信号传送给ECU,助力值由电压值转换而来的扭矩值算出辅助转向,同时具备自诊断功能,实时反映EPS系统的状况,有效提升EPS的可靠性[4]。王谷娜考虑到转向系统在汽车行驶可靠,交通安全中的重要地位,分析总结出了电动助力转向系统的各种常见故障及其危害,解释了这些故障可能出现的原因,并提出了相关故障消除的解决方案,为转向系统试验奠定了基础[5]。王虎对电动助力转向系统进行了选型研究,结合整车周边零部件环境,整车性能参数及尺寸,对电机进行选型和整车参数匹配,综合考虑各方面因素,比较不同类型EPS的优缺点,为不同车型选出最适配的电动助力转向系统[6]。除此之内,袁传义,天津职业技术师范大学,比亚迪汽车工程研究院,北京汽车股份有限公司等个人和研究机构也对电动助力转向系统的控制策略,结构优化,未来研究方向进行了研究和预测[7]~[10]。
1.2.2 国外发展状况
EPS系统最先由日本研发出,早在80年代日本公司就开始将EPS系统应用于微型轿车上,之后日本各车企均研制出适合各自车型的EPS系统。为了提高汽车性能,满足驾驶需求,欧、美等国的汽车公司也开始对EPS进行了开发和研究,此后EPS得到了飞速稳步的发展。Zhao Xue Ping分析了电动助力转向系统的转向曲线及其控制,然后提出了一种功率正弦转向曲线,并推导出了计算基准转矩的公式。最后,通过实验验证了可调参数的可行性和推导公式的有效性。得出结论:设计参数化的转向曲线来代替仿真曲线,通常需要大量原型试验,提出的动力正弦转向曲线是符合要求的,该曲线的转向感觉强度E持续存在,保证了所有转向力矩的平稳操纵[11]。Fan Chang sheng给出了控制器的主要技术指标,提出了合理的软硬件设计方案和控制器的校正方法。分别在一辆装有已开发的EPS和进口EPS的车辆上进行了对比试验验证了控制策略的可行性。结果表明,所研制的EPS不仅工作平稳,而且具有良好的转向性能[12]。Sheng Lu为了提高系统的鲁棒性,消除路面非线性因素和干扰对系统的影响,将AFSMC控制方法应用于EPS系统。仿真结果表明,该系统性能明显提高,实际电流能够准确跟踪目标电流,消除了滑模控制产生的交互问题,提高车辆的安全性[13]。W Szczypiński-Sala考虑到越来越多的车辆装有电力系统,对这些装置的工作进行适当诊断的可能性的问题具有重要意义。根据所进行的实验测试和对结果的分析,得出以下结论:基于所建立的电力辅助系统Matlab模型,对电力转向系统的参数进行了比较分析,所采取的措施能够对诊断测试仪记录的电力转向系统工作参数值进行统计离散性评价。方向盘转角和方向盘扭矩的大小决定了转向力的大小,因此在进行电力转向系统评估时,应将其作为诊断测试仪检测的参数;对测量条件的影响进行评估,可确定测试人员记录的可变性范围,该范围应作为指定可靠有效测量所需的测试条件允许波动范围的准则的基础;所进行的全部工作构成了创建诊断监视器的步骤,该监视器可用于电力转向系统的自诊断[14]。
- 研究目的及意义
当今社会,汽车已经成为人们出门远行必备代步工具之一,对驾驶员的驾驶水平要求降低,这就要求汽车转向系的功能越来越强大,能满足人们各方面的要求。EPS系统不仅具有机械转向系统无法兼顾的 “轻”与“灵”的要求,也因其节能环保,结构简单便于布置,而逐渐取代传统液压助力转向。不难得出,机电一体化,操纵稳定性更优,效率更高的EPS系统更加符合当下的需求。
- 本章小结
本章对转向系进行了介绍,对比了几种转向技术的优缺点,确立了设计电动助力转向系统,并简述了电动助力转向系统的发展历程及其国内外研究现状,总结了电动助力转向系统的研究意义和发展前景。
第2章 电动助力转向系统
2.1电动助力转向系统的组成
电动助力转向系统结构如图2.1所示,在机械转向系统的基础上加装了一套电动助力机构,其中电动助力部分有转矩传感器,车速传感器,电动机,减速机构,离合器,ECU等,机械转向部分主要是方向盘,转向轴,齿轮齿条式转向器,转向横拉杆,转向梯形臂,转向节等。
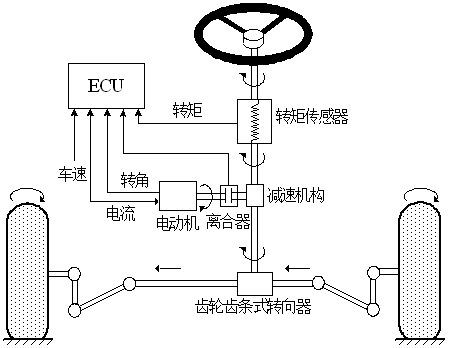
图 2.1 电动助力转向系统示意图
2.2电动助力转向系统的工作原理
当驾驶员转动方向盘时,带动下方转向轴转动,转向轴分为上下两段,其间的扭矩传感器检测两段转向轴的相对转角,转化为电信号传给ECU,ECU结合来自车速传感器的电信号,决定此时助力电流大小和电动机的旋转方向,并将指令传给电动机,电动机通过离合器,减速机构将转向转矩施加在转向轴上辅助转向,通过转向器,转向横拉杆,转向梯形臂,转向节等实时控制转向[15]。
2.3 助力转向部分的组成部件
2.3.1 电动机
EPS系统需要小尺寸大扭矩的电机,直流有刷电机原理简单,应用广泛,但是结构复杂,工作可靠性不高;直流无刷电机由于电磁惯性不适用于EPS系统,永磁同步电机低速运行稳定性强,控制精度更高,更适合运用于EPS系统。
2.3.2 扭矩传感器
光电式传感器响应快,但对光码盘要求高,电位计式传感器测量精度有限,选用非接触式的扭矩传感器,原理是将磁通量的变化通过霍尔元件转变为电压信号传送给ECU,助力值由电压值转换而来的扭矩值算出辅助转向,同时具备自诊断功能,实时反映EPS系统的状况,有效提升EPS的可靠性。
2.3.3 电磁离合器
电磁离合器的作用是在适当的时候断开电动机的动力传输,当不需要助力转向是断开电磁离合器,当需要助力转向是接通电磁离合器,在电动机故障时,也能自动断开电磁离合器,避免电动机作为负荷件影响转向。
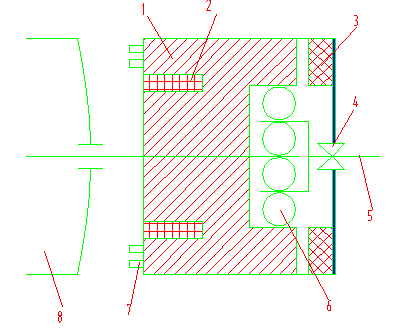
图2.2 电磁离合器结构图
1.主动轮 2.磁化线圈 3.压盘 4.花键
5.从动轴 6轴承 7滑环 8电动机
图2.2为单片式电磁离合器结构图,主动轮内装有磁化线圈用轴承与电动机输出轴相连,压盘与从动轴通过花键相连,当需要助力时,ECU传输电流控制信号给滑环,使线圈产生电磁吸力,造成压盘向左移动靠在主动轮上,这样动力就从电动机、主动轮、压盘传给从动轴。
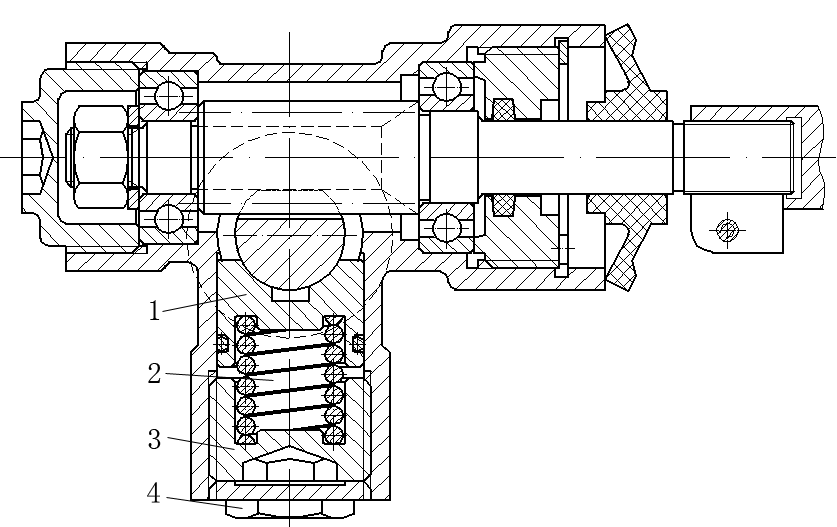
2.3.4减速机构
助力电机输出的是高转速,小转矩,作用在传动轴上时要用减速机构实现减速增矩。选用的减速机构要满足转动惯量小,可以逆向转动,同时尽量减小尺寸以便于安装。常用的有行星齿轮减速机构和蜗轮蜗杆减速机构,行星齿轮减速机传动效率高,径向尺寸小,但传动比偏大时结构复杂,精度要求高。蜗轮蜗杆可以有较大的减速比,实现交错轴的动力传递,其结构紧凑,工作平稳,冲击噪声小。
本次设计选用蜗轮蜗杆式。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: