基于YOLO算法实现自动驾驶的车辆检测毕业论文
2020-02-17 17:09:30
摘 要
最近这些年,中国的科学技术发展迅速,而与人们生活息息相关的汽车目前已经成为人们出行的主要交通方式之一,这给社会的和平健康的可持续发展带来了许多的问题,比如交通道路时常拥堵、环境遭到严重破坏以及因为各种各样的原因而逐年增高的交通事故发生率。为了缓解这些问题并且使驾驶员更为轻松,自动驾驶现在已经成为当今时代不可逆转的主题之一。车辆的目标检测是实现车辆自动驾驶的主要核心之一,是实现自动驾驶的重要保证。
本文主要阐述了自动驾驶汽车的发展及意义,目标检测的概念、发展、研究现状以及目标检测在现实中的应用,详细阐述了YOLO_v1算法的实现原理以及YOLO_v2算法相较于YOLO_v1的改进之处。本文对基于YOLO_v2算法的车辆目标检测系统进行了研究,对数据集进行训练、并且用测试集对训练过的车辆目标检测系统进行检测并得出车辆目标检测的结果,对已经检测出的实验结果进行分析,探讨并且总结该YOLO_v2车辆目标检测系统的优缺点。对本文的理论阐述和实验结果进行总结并且对可以改进的地方进行展望。
本文对车辆的检测的的速度为每秒67帧,检测速度很快。并且通过改变阈值生成P-R曲线计算出AP值,实验结果表明该系统对车辆目标检测的效果良好。
本文的特色:本文指出YOLO_v2相较于YOLO_v1算法的改进之处,点明YOLO算法深度学习的Darknet框架。本文除了详细论述了整个实验的过程并得出实验结果之外,同时还指出了本次实验的不足之处。
关键词:自动驾驶;YOLO_v2;车辆检测;神经网络;Darknet
Abstract
In recent years, with the continuous development of science and technology, driving has become one of the indispensable modes of transportation for people, which brings traffic congestion, serious damage to the environment and an increasing traffic accident rate year by year due to various reasons. To alleviate these problems and make it easier for drivers, autonomous driving has now become one of the irreversible themes of our times. Vehicle target detection is one of the main cores to realize automatic driving and an important guarantee to realize automatic driving.
This paper mainly expounds the development and significance of self-driving cars, the concept, development and research status of target detection, and the application of target detection in reality. It also elaborates on the implementation principle of YOLO_v1 algorithm and the improvement of YOLO_v2 algorithm compared with YOLO_v1 algorithm. In this paper, the vehicle target detection system based on the YOLO_v2 algorithm is studied. The data set is trained, and the verification set is used to detect and obtain the vehicle detection results. Finally, the experimental results are analyzed to discuss and summarize the advantages and disadvantages of the YOLO_v2 vehicle target detection system. The theoretical elaboration and experimental results of this paper are summarized and the prospects for improvement are given.
And by changing the threshold to generate p-r curve to calculate the AP,the experimental results show that the system has a good effect on vehicle target detection.
Features of this paper: this paper points out the improvement of YOLO_v2 algorithm compared with YOLO_v1 algorithm, and points out the Darknet framework for deep learning of YOLO algorithm. This paper not only discusses the whole process of the experiment in detail and obtains the experimental results, but also points out the shortcomings of this experiment.
Key words: Automatic drive; YOLO_v2; Vehicle detection; Neural network; Darknet framework
目 录
- 绪论 1
1.1 课题背景及意义 1
1.2 自动驾驶汽车 2
1.2.1 自动驾驶汽车的发展 2
1.2.2 实现自动驾驶的意义 4
1.3 目标检测 5
1.3.1 目标检测的概念 5
1.3.2 目标检测算法的研究现状 5
1.3.3 目标检测算法的实际应用 7
1.4 本文的研究内容及章节安排 8
- Darknet深度学习框架 10
2.1 Darknet框架的优势 10
2.2 Darknet框架主要包含的文件夹的内容 10
2.3 Darknet 框架安装完成后的启用 11
2.4 训练 11
2.5 检测 11
- YOLO_v1算法神经网络 13
3.1 卷积神经网络 13
3.1.1 神经网络 13
3.1.2 神经元 13
3.1.3 卷积神经网络的介绍 14
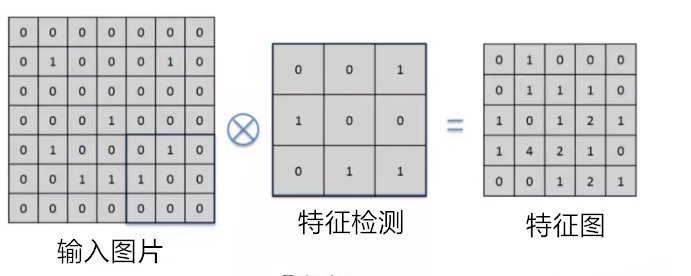
3.1.4 卷积层 15
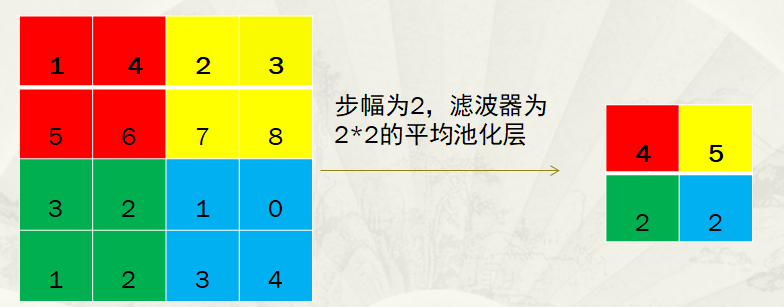
3.1.5 池化层 15
3.1.6 全连接层 16
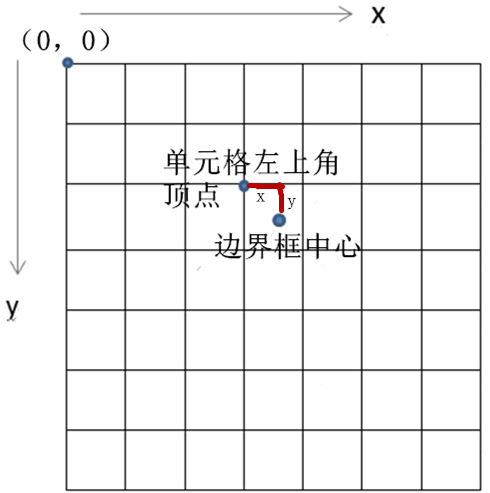
3.2 YOLO_v1算法原理 17
3.3 YOLO_v1网络结构 19
3.4 YOLO_v1网络训练 20
3.5 YOLO_v1损失函数 20
3.6 网络预测 22
- YOLO_v2算法的改进 24
4.1 引入归一化 24
4.2 提高训练网络的分辨率 24
4.3 引入锚点框 24
4.4 引入维度聚类 25
4.5 细粒化特征明显 26
4.6 引入多尺寸训练特征 27
4.7 一些其它的改进 27
4.8 YOLO_v2损失函数 27
4.9 YOLO_v2网络流程 28
- 车辆目标检测系统 29
5.1 实验开发环境 29
5.2 制作数据集 30
5.3 训练过程 31
5.4 系统检测 33
5.5 实验结果及分析 34
- 结论 41
6.1 总结 41
6.2 展望 41
参考文献 43
致谢 45
第1章 绪论
1.1课题背景及意义
我国的汽车保有量到目前为止已经超过了3亿辆,行车道也会随着行驶汽车数目的增多而显得越来越拥挤,交通事故频发,对驾驶员的驾驶资格要求越来越高,环境问题也随着车辆的增多变得更为严重。这些问题引起了极大的关注,新能源汽车受到越来越多的国家欢迎,排放标准的规格制定以及执行都越来越严格,交通监管越来越严格,我国人民考取驾驶证的难度也在不断增加。而当前正在快速发展的自动驾驶汽车技术等到成熟时便可以解决以上问题。当能够完全实现汽车的自动驾驶时,即汽车能够在驾驶员完全不进行任何不干涉甚至车内根本就没有驾驶员这种完全放手的情况下在任何没有经过预先设定的场景下完成包含车辆的调转方向、转弯、加快车速、变更车道、超越前方车辆、减慢车速、停车、避让检测到的目标以及熄火等所有操作,不仅驾驶员将会极为轻松,还能有效地解决不按规定停放车辆、车辆随意插队抢道、车速控制不合理、违反交通规则等诸多当前无法解决难题,从而有效地解决交通拥堵问题,并消除由于交通拥堵造成车辆走走停停而产生的环境污染问题。另外,现实状况中很多驾驶员在其处于前方道路视线不佳,连续驾驶时间过长造成驾驶疲劳,交通拥堵等多种不利于驾驶的状况下强行驾驶车辆,这会造成很多的交通事故,成熟的自动驾驶汽车则不会产生疲劳、交通拥堵或者情绪不佳的问题,自动驾驶汽车能够极大地降低交通事故发生率。
目标检测作为实现自动驾驶的一个核心,不能快速准确地检测到目标,就会给自动驾驶汽车带来很大的安全隐患。自动驾驶汽车能否高效准确地将目标检测出来将直接关系到行车的安全与否,检测效果差可能会造成在识别目标的时候不能准确判断其位置,也有可能判断错目标的类别和尺寸,致使汽车采取错误的操作,而这些此操作极有可能会引发交通事故,这不仅是对购买自动驾驶汽车的消费者的生命安全不负责任,还会对道路上的一些行人以及其它车辆上的乘员的安全产生巨大威胁。车辆目标检测受到越来越高的重视,但是实际的车辆所处的环境状态极为复杂,存在着各种遮挡、位置以及距离变化等多种问题。传统的目标检测算法的检测准确率低、速度慢,无法满足对实际车辆进行检测时所需的实时性的检测要求,检测效果较差。近些年来,目标检测算法的发展改进速度很快,YOLO算法的检测速度很快能够达到实时性要求,这是YOLO算法得以迅速发展的巨大优势,YOLO_v2算法便在YOLO算法发展的浪潮中被提出,当然,YOLO_v2做出了一些改进,比如其检测的精度相比于初始的版本就得到了提高。本文采用基于直接回归的YOLO_v2目标检测算法开发车辆目标检测系统,并且用从行车记录仪中获取的图片进行训练和检测,可满足对自动驾驶的车辆进行检测的要求,这对进一步促进车辆目标检测的发展起到积极的推动作用。
1.2自动驾驶汽车
1.2.1自动驾驶汽车的发展
随着交通安全问题、环境问题、道路拥堵等问题在我国变得越来越严峻,自动驾驶汽车被提起地也越来越频繁,在我国引起了极大的反响,而发展自动驾驶汽车也获得政府相关部门的大力支持。早在2017年交通运输部门就要求其下属的各个部门和国内的相关单位合作针对目前自动驾驶技术存在的问题从自动驾驶汽车发展所需的各个方面提出合理的可操作的建议,以尽快解决我国自动驾驶汽车在发展中存在的诸项问题,推动自动驾驶汽车的快速成熟及应用。国家众多部门相互合作,不断地推出了可以极大促进自动驾驶汽车行业在我国可持续发展的政策、措施及要求,比如《汽车产业中长期发展规划》就明确指出我国在未来几年自动驾驶汽车需要攻克哪些技术难题以及所期待的能够达到的高度。其实许多国家的某些企业、研究所以及高校早在很久之前便已经开始从事自动驾驶汽车相关的研究,只不过是在近些年到达了发展的高潮期而已。就像我国,早在上世纪八十年代便开始了自动驾驶汽车的相关研究工作,并且在几家高校的通力合作下研制出我国的第一辆无人汽车ATB-1,该车在后期的道路实验中其速度不管是在直线道路中还是弯道中都已经初具规模,在直道中最高能够达到21km/h,在弯道中最高能够达到12km/h。后来有越来越多的高校和企业开展对自动驾驶汽车的研究工作。在2002年红旗CA7460被成功地研发出来,该车能够根据道路及车道上的其他车辆的状况自行更换车道,而且在道路实验当中该车的最高时速能够超过110km/h。同属一汽集团下的红旗HQ3自动驾驶汽车便是在国科大和一汽公司在彼此之间通力合作的基础上于2011年被成功研制出来。“红旗HQ3的无人驾驶试验是在高速公路上进行的,总的实验里程达到286公里[5]”。而且在整个试验过程中有驾驶员对汽车的行驶状态参与干预的距离极短,仅仅为2.23公里,是整个无人驾驶试验总长的0.78%,该实验表明我国自动驾驶汽车又取得了重大进步。就目前而言,国内所有大型汽车企业、以及一些互联网企业都设立了或与其它单位合作自动驾驶汽车的研究项目,这些项目可以极大地促进高校与企业之间、企业与企业之间的合作,推动我国自动驾驶汽车的发展进程。L4级自动驾驶巴士“阿波罗”在去年就已经量产下线,而该型号汽车就是由百度和金龙客车公司相互合作研制成功的。这辆汽车在今年的1月份在阳泉段高速高速公路上进行了测试,提高了企业的科研水平,也推动了我国自动驾驶汽车的进步。为推动自动驾驶汽车快速发展,各国政府、企业、基金会、研究所以及各大高校等众多单位联合举办了多项大型比赛,比如“中国智能车未来挑战赛[5]”,“国际自动驾驶创新大赛[5]”,“沙漠机器人挑战大赛”,“中国国际无人驾驶汽车赛”以及“i-VISTA自动驾驶汽车挑战赛”等,许多的企业、高校以及一些科研单位就是在这些赛事中得到了某些灵感完成某些自动驾驶难题的攻克,而且这些赛事对各单位研究推进自动驾驶的发展起到极大的推动作用。在去年的i-VISTA自动驾驶汽车挑战赛中就在实际道路上对各汽车在很多的项目中进行了残酷的选拔,刺激自动驾驶汽车的发展。
自动驾驶汽车在世界范围内发展势头猛烈,去年日本政府的多个部门和企业合作在日本全国范围内掀起了用实验验证自动驾驶系统的浪潮,并且目前已经完成车辆和道路的协同、车辆和车辆之间的通信的实验验证工作,后面又继续开展了对自动驾驶汽车在多种道路上的实际应用情况的验证工作,目前又已经加入高精度地图的实验验证工作。美国为了解决当前自动驾驶汽车相关的研究难题,特意由其交通部门组织了“智能城市挑战赛”这一比赛来鼓励各城市将自动驾驶、车辆网络连接以及车辆和道路间的相互通信等技术有效地应用到实际当中。去年的3月份亚利桑那州开创了先例,该州在没有驾驶员在汽车内的情况下允许汽车以自动驾驶模式在公共的道路上进行汽车的自动驾驶性能测试,这一条例在美国引起了轰动,到目前为止美国已经有20多个州赞同并且实行了这项命令。至于在自动驾驶车辆的成果方面,早在去年通用公司便在纽约进行了L4级自动驾驶实验,这次实验在全球也是首次进行,彰显了自动驾驶强国的底蕴。自动驾驶汽车按其自动驾驶技术的成熟程度被划分为不同的等级,“通用汽车公司所使用的对自动驾驶汽车划分分级的方法是由SAE提出的,SAE的全称是美国机动车工程师学会,该学会将自动驾驶汽车分成了L0- L5级这6个级别[6]”,级别由L0- L5不断增高。L0为无自动化级别,驾驶汽车时必须要有驾驶员在,驾驶员不得中途离开或注意力不集中;L1级别汽车的自动系统在有些时候能够帮助驾驶员完成某一项驾驶操作;L2级别的汽车能够实现部分自动化,其操作项已经不再是单一的某一项,该级别的汽车可以同时对两项或者多项操作进行控制;L3级别的汽车在条件允许的情况下能够完成特定场景下的自动驾驶操作,只是路线、场景等存在一定的局限性;L4级别的自动驾驶汽车具有高度自动化的特点,能够在一定条件下实现完全自动驾驶,但是在超出设定范围的情况下必须要有驾驶员在车上。通用这项实验所用的汽车能够达到L4级别,已经比当时的任何一个国家都要领先。至于能够实现完全自动化并且不再局限于特定场景下的L5级别的汽车,目前还没有任何一个国家能够将其成功研制。德国是一个汽车产业高度发达的国家,德国的许多汽车在世界范围内受到欢迎,其出名的汽车品牌有大众、奔驰等好几家,这也使得德国汽车生产理念和技术全球范围内都是领先的。其自动驾驶汽车的发展也是极为迅速的。德国拥有的关于自动驾驶的专利以及发表的研究论文多年来一直位列世界第一。2016年德国为了使自动驾驶汽车的性能更进一步,并且确定关于自动驾驶汽车的评价标准,其政府相关部门与多个科研团队相互合作开展了PEGASUS这一研究项目,而这也确立德国在世界上自动驾驶汽车领域的领先地位。除了有各国政府参与的研究项目外,世界上各大汽车制造厂或者研发中心也和各大互联网企业相互合作,为了更好地在自动驾驶领域抢占先机以图将来在汽车领域占得更大的市场,目前都在如火如荼地进行相关项目的开发研究。
为了大力发展自动驾驶汽车,各国都制定并实施了相关的政策法规来对其发展进行保障。美国在2017年表决通过了《自动驾驶法案》的提案,用法律的方式来保证自动驾驶的高速有效发展,为了优先保证自动驾驶的安全性,美国在2017颁布了《自动驾驶系统2.0:安全展望》这一自动驾驶汽车安全标准,以促进自动驾驶汽车的安全性能的发展。2015年德国政府相关部门发布了《自动和联网驾驶战略》这一法律文献来为自动驾驶的发展创造有利条件。除此之外,“在2017年德国还通过了《道路交通法第八修正案》这一法案,该法案以法律的形式承认了自动驾驶汽车的法律地位[6]”,并在该法案中明确指出自动驾驶汽车发生交通事故时的责任判定准则以及理赔的具体规定。去年日本对其自动驾驶的相关制度进行了调整,并颁布了经过调整后的大纲,为自动驾驶的今后发展的方向提供指导依据。为了促使自动驾驶汽车尽快迈向市场,日本政府在《官民ITS构想路线图》中将这一目标提出,并且为了达成这一目标,日本在制度保障和技术攻克投入了巨大力量。各国都制定了各种政策并提供资金支持来促进自动驾驶的发展,这也使得自动驾驶迈向市场的难度大大降低。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: