汽车自适应前大灯控制系统设计(硬件部分)毕业论文
2020-02-17 17:54:13
汽车自适应前大灯控制系统设计
(硬件部分)
学院(系): 国际教育学院
专业班级: 车辆gj1502班
学生姓名: 李壮
指导教师: 秦岭
学位论文原创性声明
本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包括任何其他个人或集体已经发表或撰写的成果作品。本人完全意识到本声明的法律后果由本人承担。
作者签名:
年 月 日
学位论文版权使用授权书
本学位论文作者完全了解学校有关保障、使用学位论文的规定,同意学校保留并向有关学位论文管理部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权省级优秀学士论文评选机构将本学位论文的全部或部分内容编入有关数据进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
本学位论文属于1、保密囗,在 年解密后适用本授权书
2、不保密囗 。
(请在以上相应方框内打“√”)
作者签名: 年 月 日
导师签名: 年 月 日
(注:此页内容装订在论文)
Abstract
Traditional automobile headlights include near light, high beam, fog light, and the position of the lights relative to the body are fixed. With the continuous development of electronic technology, people's requirements for the lighting system of car lights are also increasing. There are some problems in the traditional lights, such as: when the vehicle is driving on the bend at night, the traditional lighting has obvious blind area, which makes the driver unable to cope with the emergency and has a huge hidden danger of safety. Therefore, how to make the lighting system intelligent and enhance the driving safety is of great significance.
In view of the fact that the traditional lamp is fixed relative to the body and can not provide better lighting when driving on the bend, an adaptive headlamp follow-up steering system is proposed. The system can greatly increase the safety of driving at night. The system is an electronic control system based on single chip microcomputer for horizontal follow-up steering of automobile headlights. The hardware part mainly includes four modules(vehicle speed signal acquisition module, steering wheel angle signal acquisition module, single-chip microcomputer processing module and execution module). The specific working mode is as follows,the single chip microcomputer collects the speed signal and the steering wheel angle signal in real time, and controls the rotation of the stepping motor after processing and judging according to the corresponding algorithm. An adaptive horizontal steering control system for automobile headlights is implemented.
Keyword:Adaptive control, Follow-up steering microcomputer,
Speed signal,Steering wheel Angle signal,dead zone
目录
Chapter 1 Introduction 1
1.1Background and significance of the study 1
1.2 Research status and development trend at home and abroad 1
1.2.1 Status of domestic research 1
1.2.2 Status of research abroad 2
1.3 The main design content of this paper 2
Chapter 2 The overall design scheme of the system 3
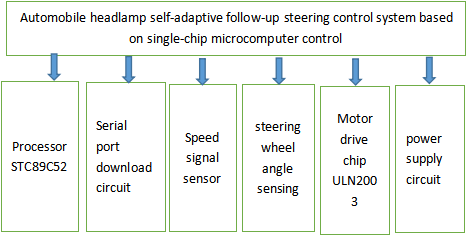
2.1 composition and function of the system 3
2.2 Adjustment of headlamp horizontal angle. 4
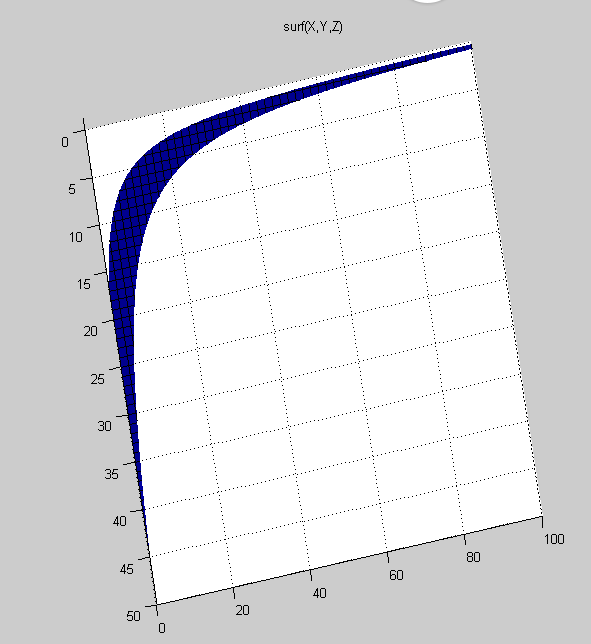
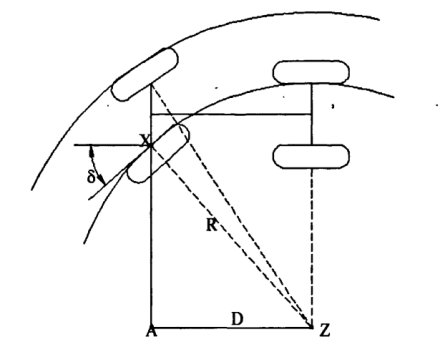
2.2.1 Calculation of horizontal adjustment angle 4
2.2.2 Correction of horizontal adjustment angle 7
2.3 Summary of this chapter 9
Chapter 3 System hardware Design 9
3.1 overall structure Design of Control system 9
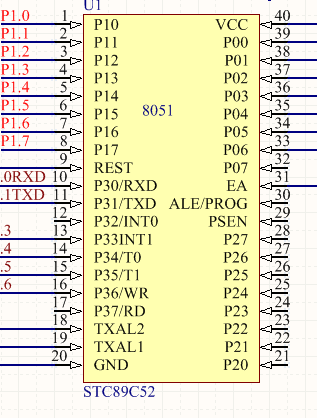
3.2 Microprocessors 10
3.2.1 Development of single Chip Microcomputer 10
3.2.1 The characteristics of MCS-51 single Chip Microcomputer 11
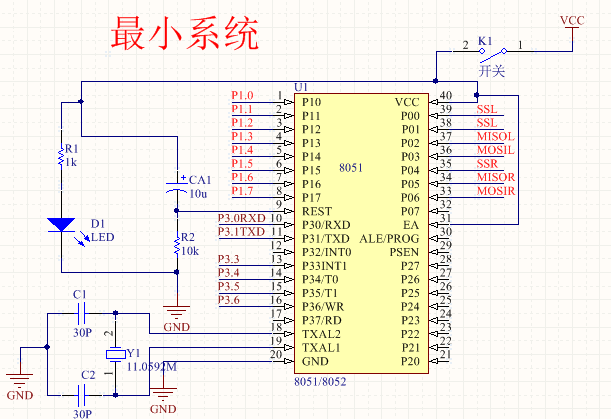
3.3 Clock circuit 12
3.4 Reset circuit 13
3.5 Power supply module 14
3.6 Single chip microcomputer download circuit 14
3.7 Speed signal sensor module 15
3.7.1 Photoelectric pulse generator 15
3.7.2 Magnetoelectric pulse generator 15
3.7.3 CS3020 Hall sensor 16
3.8 Steering wheel angle sensor module 17
3.9 stepping motor drive module 20
3.10 stepping motor 21
3.11 Summary of this chapter 23
Chapter 4 system Software Design 23
4.1 overall structure of the software system 23
4.2 Speed signal detection module 24
4.3 steering wheel corner signal acquisition 24
4.4 Main program flow chart: 26
4-5 Summary of this chapter 26
Chapter 5 Simulation and debugging of the system 26
5.1 simulation of speed measurement 26
5.2 Simulation of steering wheel corner acquisition 27
5.3 Simulation of the whole control system 28
5.4 Summary of this chapter 28
Conclusion 29
Thanks 30
References 31
Appendix 32
Chapter 1 Introduction
1.1Background and significance of the study
Traditional automobile headlights include near light, high beam, fog light, and the position of the lights relative to the body are fixed. Generally speaking, when driving on roads with low speed and complex surrounding environment, near-light lamps are mainly used to deal with possible emergencies. When meeting, we should use near light to prevent lamplight to make the other side driver produces vertigo; In the case of high-speed driving on the highway, high beam is mainly used to increase the visual distance. In the case of fog, we should turn on fog lamps to obtain good lighting conditions. However, there are two kinds of problems in the actual use process :(1) the factors of the car itself, because the position of the car light is fixed relative to the body, when the car is driving on the curve, there will be a blind area, when the car load changes, the direction of the light will change in the vertical direction, affecting the lighting. (ii) Human factors. The driver forgets or has no time to switch lights when meeting a car. Some drivers who are not safety conscious enough will even use one light to the end when driving on the rural roads, without switching lights from beginning to end, resulting in a high incidence of traffic accidents. In view of the problems above, it is significant to develop an adaptive headlight with multiple functions. In this way, it can not only solve the inherent problems of traditional car lights, but also avoid the influence of human factors, so as to achieve traffic safety at the greatest extent. Adaptive headlight systems were born under this background. AFS is a safety system to achieve intelligent control of automotive headlights by electronic technology. That is, with the speed, steering wheel Angle, car body inclination, external light intensity and other factors of change, the car headlight shaft will be real-time left and right adjustments, brightness will also be adjusted to make the light more safe and reasonable.AFS mainly includes three aspects, the collection of body information --- sensor, and then according to the collected information to calculate and process, finally control the stepper motor and car LED lights according to the results of the calculation.
1.2 Research status and development trend at home and abroad
1.2.1 Status of domestic research
In 2005, Shanghai Small Line Group conducted a preliminary study on AFS system. The company believes that the current AFS only adds the function of turning lighting on the basis of automatic dynamic dimming system. At the beginning of 2007, Shenyang North Automobile headlamp automatic steering gear factory successfully developed automobile automatic steering headlamp, this product broke the monopoly of foreign companies in this regard, and made a breakthrough in the field of automobile lighting. However, there is still a certain gap with the adaptive headlamp. In the same year, Wei Bing of Shanghai University and others designed a set of low power steps based on LIN bus and single chip microcomputer. The automatic dimming system of the headlamp of the motor. In 2008, Sheng Jing and others of Nanchang Institute of Engineering used the centrifugal force of automobile turning to drive the light steering principle. A set of automatic steering lighting system is calculated, which enhances the lighting of the vehicle at the corner of the corner or intersection, and improves the visibility of the driver at night. According to the relationship between the speed of the vehicle, the turning wheel angle and the forward and backward inclination angle of the vehicle, Rong Hui and others of the China Automobile Technology Research Center put forward the mathematical model of the turning system. On this basis, the control method based on the numerical model and the treatment method of failure are studied. Liu Jianxun of Chongqing Jiaotong University uses two-lamp two-axle automobile to discuss the scheme which can solve both the problem of front wheel driving road lighting and the problem of rear wheel driving road surface lighting. With the wide application of AFS system in foreign countries, domestic depots will gradually accept and recognize the important role of AFS system in active safety, and its domestic market will be gradually opened.
1.2.2 Status of research abroad
Auto adaptive headlamps technology in foreign country is already quite mature, as early as in the 1980s, a foreign laboratory completed the development and testing of static AFS system, and in 1992, it became a key research project, which was called the European Community yonica 1403 project [1]. The project was strongly supported by major automobile enterprises in Europe, Japan and the United States. In the late 1990s, some foreign car companies began to put the static AFS system into production, and it quickly became a new highlight of the new generation of luxury cars. The development of the dynamic AFS system is much later than static AFS system. The development of the dynamic AFS system is much later than that of the static AFS system. The company manetti marelli headlights in 2003 installed dynamically adjustable automobile headlights firstly. At present, auto adaptive headlights are mainly based on dynamic adjustment, and the companies developing AFS system mainly include VALEO of France, DENSO of Japan and HELLA of Germany.
1.3 The main design content of this paper
The left and right steering control system of automobile adaptive headlamp makes use of sensing technology, computer technology, control technology and mechatronics technology so that the left and right steering control system of automobile adaptive headlamp can be based on the speed of the vehicle. The steering wheel angle information provides a reasonable irradiation range for the driver, which provides a more favorable guarantee for improving the driving safety of the vehicle. This paper draws lessons from the current international and domestic technical experience and design ideas in this field, and develops an adaptive headlamp follow-up steering control system based on single chip microcomputer. The main contents of the study are as follows:
Chapter one briefly introduces the research background, development status and future development trend of the subject. The second chapter mainly discusses the overall scheme of the system, including the theoretical basis, working principle and basic functions of the system. And the composition of the system. The third chapter mainly discusses the hardware design of the system, including the overall design of the system hardware.
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示:
![]44G${5KI@26Z]I4WNI[W`H](http://www.biyelunwen.org/wp-content/uploads/2020/02/lw9174_20202171754101.png)