MQ4025门座起重机总体及运行机构设计毕业论文
2020-02-19 19:20:30
摘 要
本文主要完成的是对MQ4025门机总体和运行机构的设计。根据设计参数及其要求,完成金属结构的型式选择;进行整机总体布置;估算各部分重量重心位置和迎风面积;完成载荷计算表以及重量重心位置表;进行轮压计算以及整机抗倾覆性的校核。完成了运行机构方案的选择及稳态运行阻力的计算;电动机的选择;减速器的选择;制动器的选择; 以及打滑计算。最后完成所设计的运行机构的建模以及仿真动画工作。
关键词:门座起重机;总体设计;运行机构;选型。
Abstract
This paper mainly completes the design of the overall and operating mechanism of MQ4025 gate crane. According to the design parameters and requirements, complete the type selection of metal structure. The overall arrangement of the whole machine is carried out, and the load calculation table and the weight center of gravity position table are completed by calculating the position of the weight center of gravity and the upwind area of each part. Calculate the wheel pressure and check the overturning resistance of the whole machine. The selection of running mechanism scheme, the calculation of steady state operation resistance, the selection of motor, the selection of reducer, the selection of brake and the calculation of skidding are completed. Finally, the modeling and simulation animation of the designed running mechanism are completed.
Key words: gantry crane; general design; operation mechanism; type selection.
目 录
第1章 绪论 1
1.1 目的和意义 1
1.2 国内外研究现状 1
1.3 设计内容 2
第2章 总体设计 3
2.1 MQ4025门座起重机技术参数 3
2.2 金属结构选型和工作机构选型 4
2.3 重量重心估算 7
2.4 风载荷计算 9
2.5 轮压计算 13
2.5.1 各支腿支承反力计算公式 13
2.5.2 最大最小轮压计算 14
2.6 整机抗倾覆稳定性 15
2.6.1 无风静载工况 15
2.6.2 有风动载荷工况 15
2.6.3 突卸载荷或吊具脱落工况 15
2.6.4 非工作状态暴风侵袭工况 16
第3章 运行机构设计 17
3.1 稳态运行阻力 17
3.1.1 摩擦阻力 17
3.1.2 坡道阻力 17
3.1.3 风阻力 17
3.1.4 稳态运行阻力 18
3.2 选取电动机 18
3.2.1 计算功率 18
3.2.2 电动机校验 19
3.3 选择减速器 21
3.3.1 传动比 21
3.3.2 输入功率 21
3.3.3 选减速器 21
3.4 选择制动器 22
3.4.1 制动转矩 22
3.4.2 选取制动器 22
3.5 打滑计算 23
3.5.1 启动时打滑校验 23
3.5.2 制动时打滑校验 23
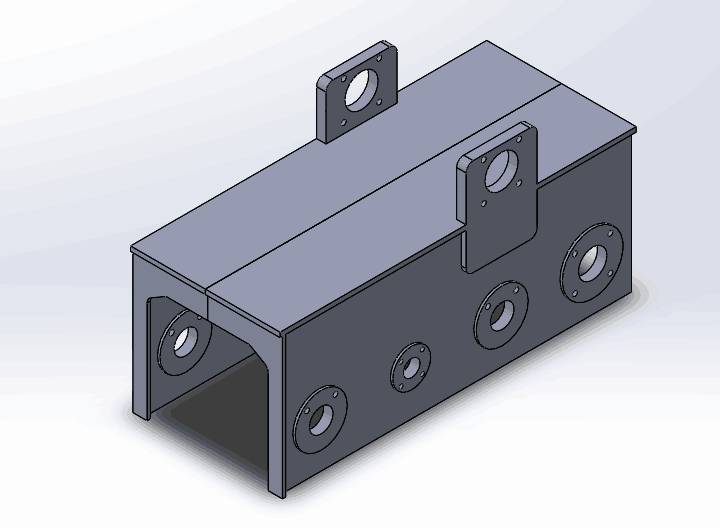
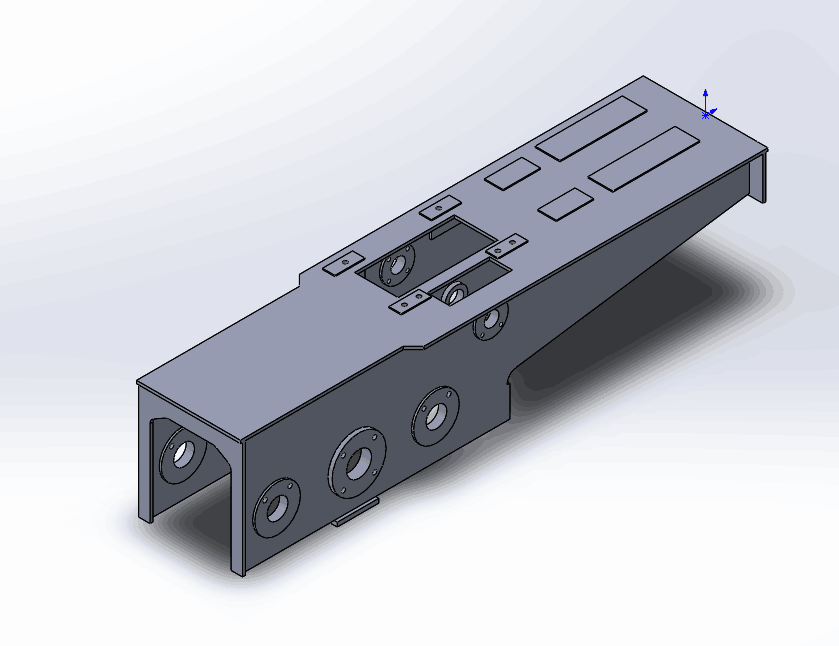
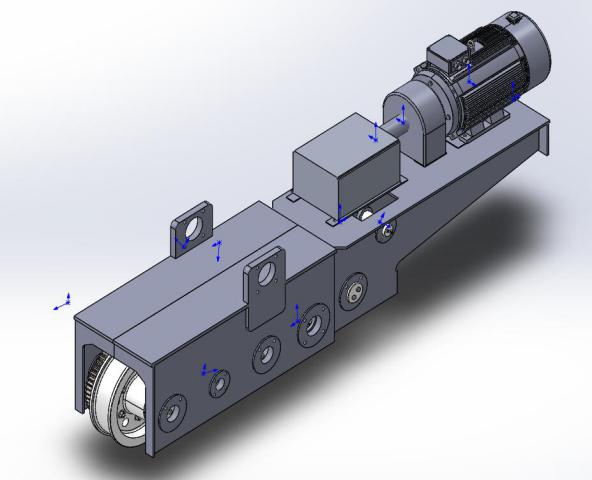
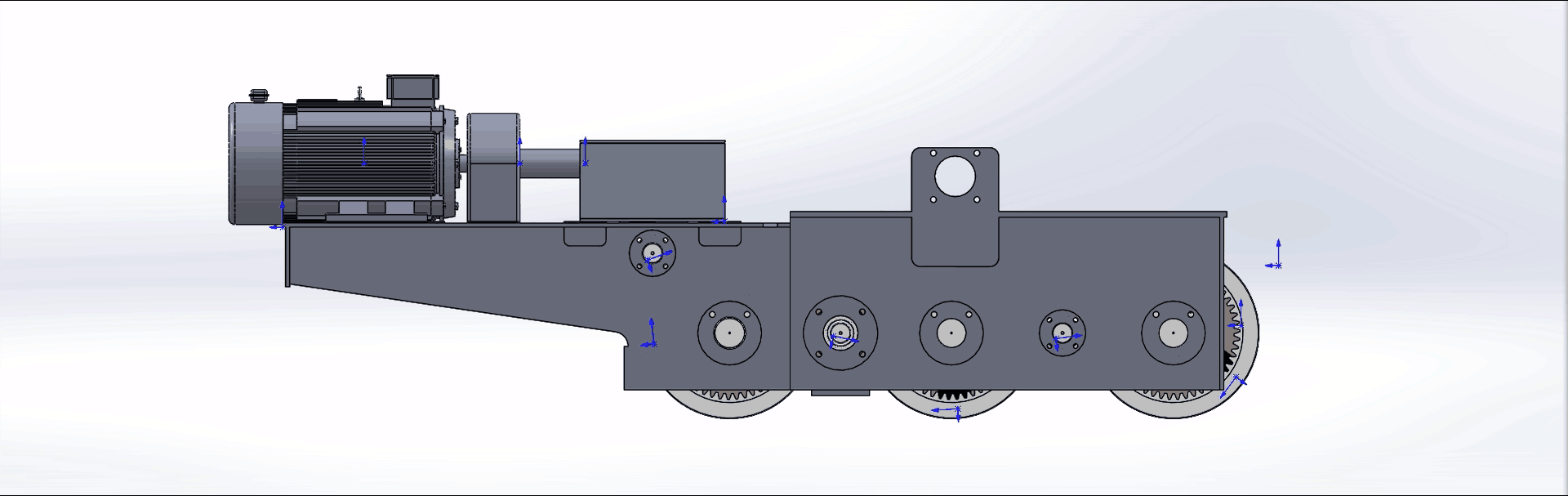
3.6 基于SolidWorks三轮台车三维建模 24
3.7 基于SolidWorks三轮台车动画仿真 26
第4章 总结与展望 28
4.1 总结 28
4.2 展望 29
4.3 经济性与环保性分析 29
参考文献 30
致谢 31
第1章 绪论
1.1 目的和意义
门座起重机的发展具有重大意义。在现代的机械生产与运输当中,自动化和高效的工作越发成为主流发展和研究的方向。在机械工业的发展潮流中,如何在减轻人力工作的同时更加高效的完成工作任务是不断推动发展与现代化一直所追求的。而在港口的运输当中,门座起重机担任着重要角色。作为电动装卸机械,门座式起重机具有更适合的性能并且占据着不可动摇的重要地位。由于世界的进出口和交流,港口的自动化程度也同样影响着国家的发展和昌盛。随着时代的不断进步和发展,机械化和自动化在工业发展的过程中起到了及其重大的作用,这对于人民生活的改善也同样是巨大的。并且,由于机械自动化的进步,人民的物质文化生活和社会经济建设也必然随之迅猛发展。因此,对于起重机,尤其港口地区对于门座起重机的研究及其发展至关重要,更加合理以及更加高效的机械自动化的工作也是现代化最重要的标志之一。所以,对于门座起重机的研究也具有重大意义。
1.2 国内外研究现状
运行机构对于门座起重机至关重要,无论大车还是小车,对工作效率都有重大改变。因此,对于运行机构的研究具有长远意义。对其运行机构进行研究,以得到更加好的设计方案是研究的重要方向,这对于起重机的工作效果也有极大的改善。赵志超[1]提出了一种门座起重机防阵风能力计算方法,从精确计算的角度出发,计算分析门机设备在不同情况下的抗滑移能力,并以此推算出门机的防风等级,为码头开展防风工作提供了依据。杨书强[2]用ADAMS进行仿真。为后来的发展提供了更好地方法。孙建锐[3]仿真了各个工作环境下整机的情况,并进行了分析。
随着自动化的不断进步,门机在此发展潮流中起到的作用也越发巨大。李明星[4]在对起重机进行设计时,应用模块化方法,应对了设计中遇到的各种问题。
在门机结构的的发展当中,国外的发展十分迅猛,所运用的新型材料在外观和实用性都十分先进。对于整体的设计更是十分紧凑,尤其“三合一“运行机构,则是国外研究的先进传动部件,在实际应用的表现更是得到国际的广泛认可,目前,世界上很多起重机均采用了此设计。由此可见国外在设计层面还处于十分领先的地位。作为机械产品,其安全性至关重要,设计开发一种门座起重机安全监控系统。通过传感器、数据、视频等方式,对门座起重机实时监控,使得作业过程更有保障。Brkic VKS,Klarin MM等[5]对起重机舱室内部的人机工程学设计进行了研究。毫无疑问,起重机舱室内部的人机工程学设计同样十分重要,因为起重机最终是要面向用户的,人们的切身感受才是根本。所以,从这个方面考虑,这也是提高起重机安全性的途径之一。
Yingguang Chu,Lars Ivar Hatledal等[6]基于一个真实的门式起重机,通过仿真结果建立模型,然后将模型集成到整个仿真平台中,通过模拟港口起重机的吊装和变幅操作,分析吊装和变幅过程中的功率变化和能耗,为节能研究提供了基础。Haiwei Liu,Weijian Mi等[7]也做出了相同类似的研究。
现在,起重机不仅仅只应用在港口运输,在基建项目中它同样十分常见,机械化越来越趋于人民的生活。随着生产建设的需求增加,起重机械的功能也越发完善。人民的生活也被起重机,被机械影响着。为了安全,赵章焰,李君[8]提出对其结构的诊断管理。以此保障人民安心的生活在当下的环境中。同样,丁冲,贾磊,郭晓光,钱红飙[9]实现了门座起重机运行状态的实时监控。尽可能减少了事故的发生。张波,张浩[10]提出参数化思想。文鹏[11]根据建模计算也为后来的研究发展起到了重要作用。聂勇军,廖启征[12]利用Recurdyn、Amesim、Matlab/Simulink建立机电液联合仿真模块,实现了跨领域的仿真。
丁东方[14]根据应力数据,完成整机的安全评估并提出完善方法。掌握了门座起重机金属结构的技术状态。须雷[15]归纳各大设计方法与案例。
在机械化发展的潮流中,有设计中的发展,有材料的进步,结构的创新。起重机也朝着越来越先进,越来越自动化的方向不断发展,而在某种意义而言,这些先进的发展都在趋于与数据和控制方向的发展。使得起重机越发偏向于智能化方向不断前进。最终一切为适应现代化的生产。
随着与世界之间的不断学习和交流,也同样伴随我国在本土,在国外的运输与基建项目的发展。我国的机械也得到了迅猛的飞跃。人民也渐渐意识到机械行业发展的重要性。国外的发展还走在世界舞台的前列。我国在很多方面并不占有优势。现在,国外比较出名的起重机公司都已经采用起重机模块化设计设计成本得到了很大的降低。除了性能强劲之外,其机构的设计也极为新颖。国内起重机则更加注重其工作需求。在自主研发的道路上,我国也在不停地摸索与前进,并且已经获得了一些不错的成绩,在世界的舞台上打造出了自己的一席之地。
门座式起重机作为主流的机械产品,因为工作的环境和要求的差异,所需的功能也很多样,在今后的必定有很大的发展空间。因此,此次以门座起重机为设计主题不但是对专业完成工作,更是为了对门座起重机有进一步的了解和研究。对门座起重机的研究也极富前景。
1.3 设计内容
本次的设计分别对门座起重机的总体和运行机构进行设计。其中总体设计部分中进行了门座起重机金属结构以及工作机构的选型;各部件重量重心以及风载荷的计算;轮压的计算和抗倾覆稳定性校核;还有总体设计CAD图的绘制。在本次设计的运行机构中进行了稳态运行阻力的计算;电动机的选择;减速器的选择;制动器的选择以及打滑计算。在运行机构的设计中还对运行机构通过SolidWorks进行建模以及最后完成仿真工作。
第2章 总体设计
2.1 MQ4025门座起重机技术参数
起重量:40t
工作幅度(最大/最小):25m/10m
起升高度(轨上/轨下):18m/15m
机构工作速度:
起升机构:20m/min(吊钩)
35m/min(抓斗)
变幅机构:25m/min
回转机构:1.2r/min
运行机构:25m/min
机构工作级别:整机:A7
起升机构:M7
变幅机构:M7
回转机构:M7
运行机构:M4
基距:12m
轨距:11m
工作最大风压:250N/㎡
非工作最大风压:1560N/㎡
许用轮压:250KN
轨道型号:P50
最大尾部半径:7.5m
电源:380V/50Hz
使用地区:沿海
2.2 金属结构选型和工作机构选型
2.2.1 确定主要工作机构形式
(1)起升机构的选择
起升机构在整机之中十分关键,用以实现载荷的升降。整机的作业根本就是为了装卸货物,因此,其性能关系到整机的作业质量。
在本次设计当中,将电动机与减速器相连进而驱动卷筒转动,以此完成工作。这种方法布置简单可靠。如图1.1。其中钢丝绳卷绕系统如图1.2。
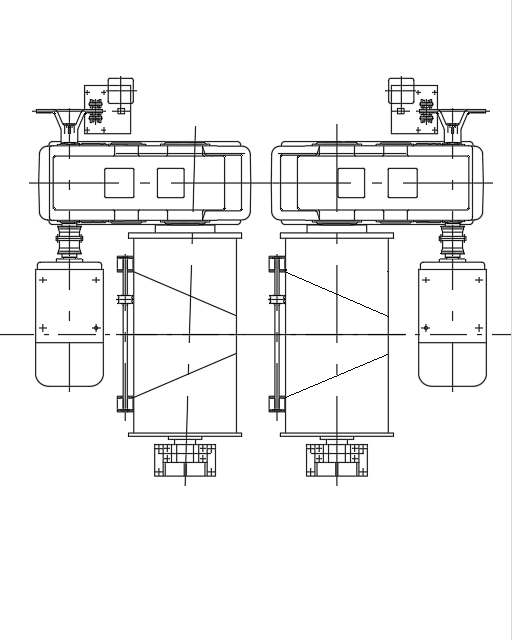
图1.1 起升机构示意图
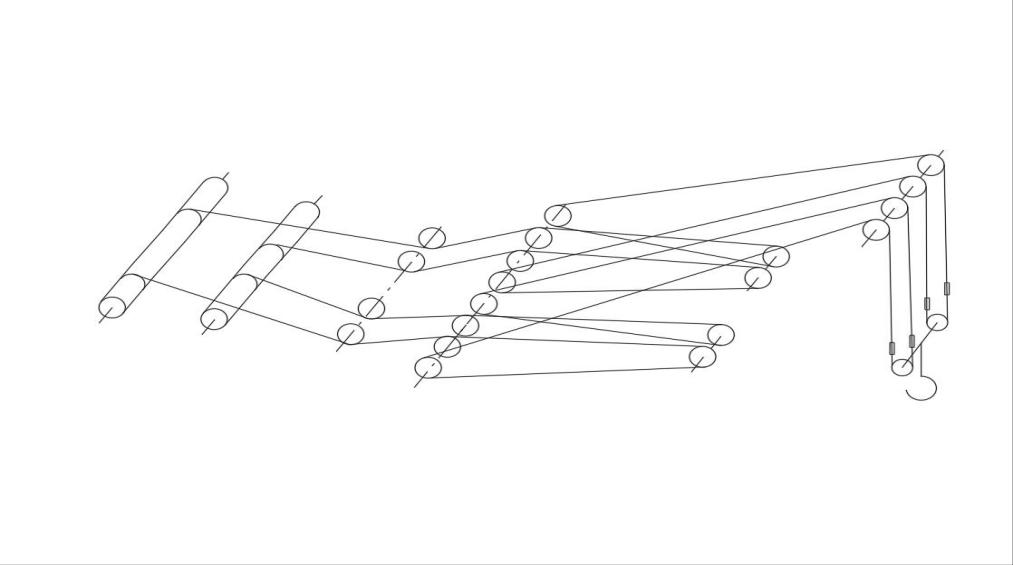
图1.2钢丝绳卷绕示意图
(2)运行机构的选择
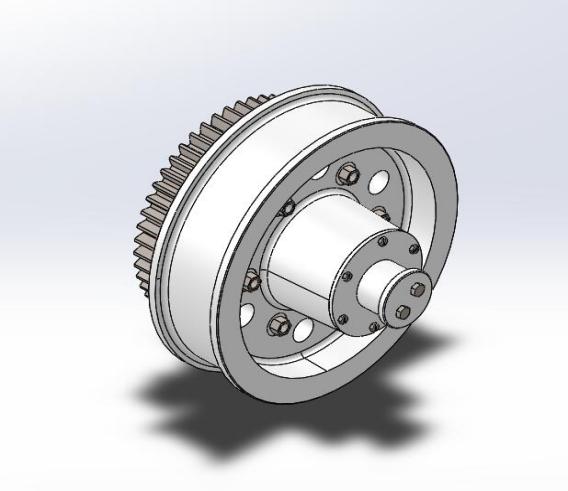
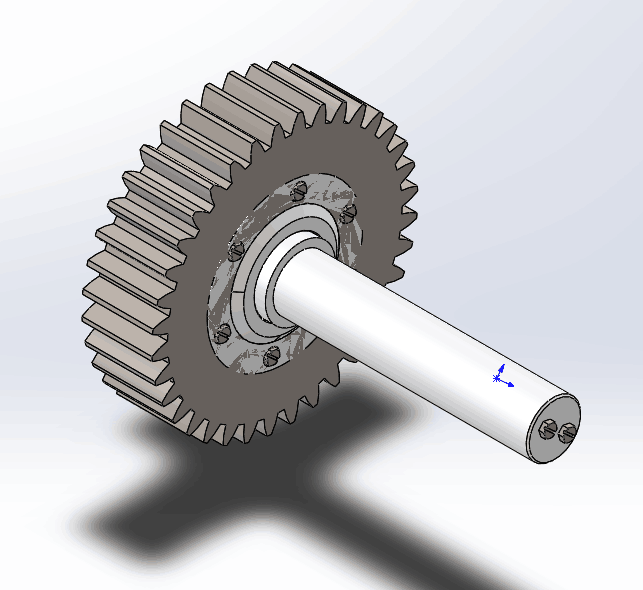
运行机构是使起重机做水平运动的机构,是门座起重机整机的重要组成部分。采用分别驱动,轨道为规定的P50。如图2。
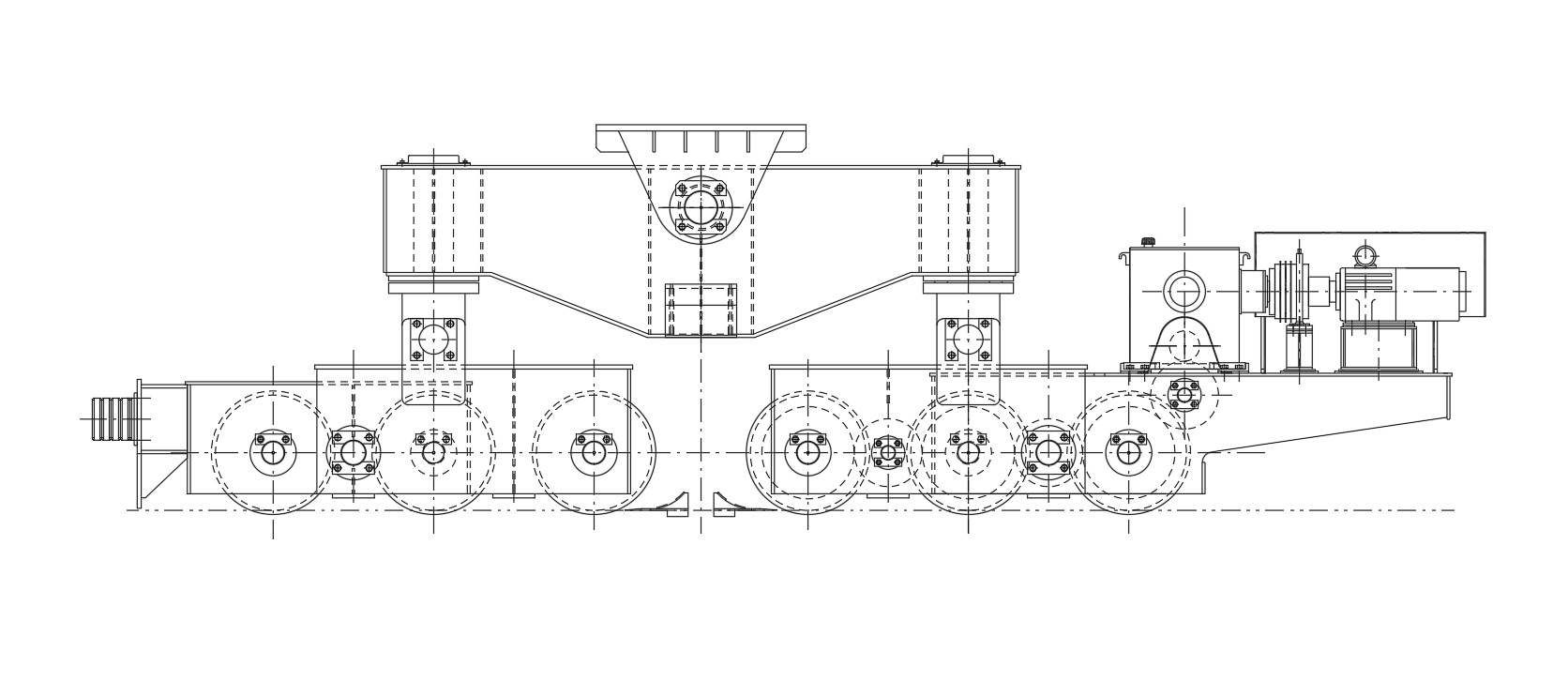
图2运行机构示意图
(3)回转机构的选择
本次设计的回转机构驱动部分安置在回转部分,大齿圈安置在整机固定部分,如图3。
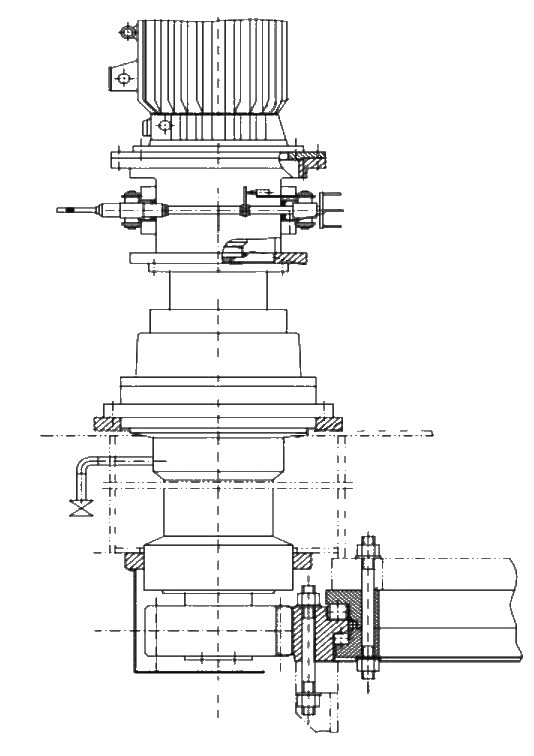
图3回转机构型式示意图
(4)变幅机构的选择
本次设计选择齿轮齿条传动。这种方法不但可以减轻自重,还具有更高的效率。此外,采用这种方法对故障检修也提供了便利。如图4所示。
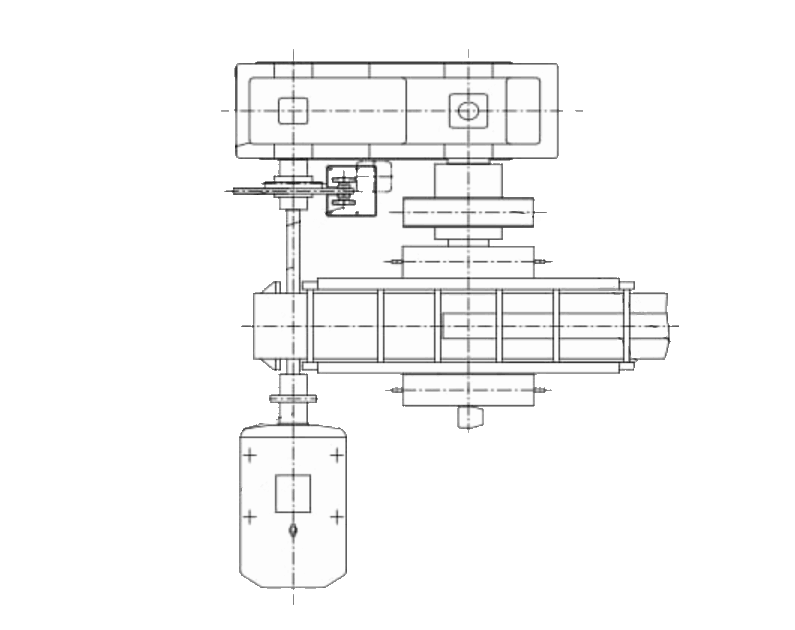
图4变幅机构型式示意图
2.2.2 确定金属结构形式
起重机的金属结构是整机的主体部分,在整机中主要起到了支承作用。一切装置都安置在金属结构上。除此之外还要承受其他载荷,对于整机十分关键。
在本次设计中,起重机应用于港口这种多变的条件下。因此所作用的载荷十分多变,为保证其正常工作,要求足够的强度、刚度以及稳定性。此外合理的结构可以减轻自重,这样不但布置制造会更为简便,更降低了成本以及整机的负荷。
对于回转部分的金属结构,在本次设计当中,选择自重较小的单臂架。又由于桁架式结构与无斜式结构和桁架梁式结构相比,重量更小,因此采用桁架式单臂架结构。
对于人字架,本次设计选取桁架式人字架以减轻自重。
回转平台选取工字型板梁结构,并对其进行加强以保障安全。
对于固定部分的门架,在本次设计中,保证门架能够支承足够重量。此外还应该承受其他载荷。由一个圆柱筒和四个门腿构成。
2.3 重量重心估算
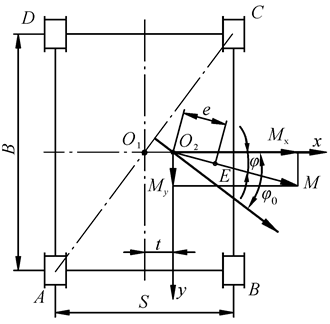
以圆筒中心线为中心,x轴垂直于轨道方向,y轴平行于轨道方向建立坐标系。
表2.1 门机最大幅度时各部分质量及质心位置
序号 | 部件名称 | 质量 |
| |||
Gi | Xi | Gi×Xi | Zi | Gi×Zi | ||
t | m | t∙m | m | t∙m | ||
1 | 起重量 | 40.00 | 25.00 | 1000.00 | 22.00 | 880.00 |
2 | 吊钩总成 | 1.28 | 25.00 | 32.00 | 22.00 | 28.16 |
3 | 臂架总成 | 18.36 | 13.10 | 240.52 | 18.20 | 334.15 |
4 | 人字架 | 30.20 | -1.00 | -30.20 | 19.50 | 588.90 |
5 | 活对重 | 15.40 | -5.00 | -77.00 | 26.50 | 408.10 |
6 | 回转机构 | 11.12 | 0.00 | 0.00 | 14.20 | 157.90 |
7 | 转台 | 22.20 | -1.10 | -24.42 | 14.20 | 315.24 |
8 | 机器房 | 7.44 | -3.00 | -22.32 | 17.10 | 127.22 |
9 | 固定配重 | 28.00 | -6.00 | -180.00 | 17.30 | 519.00 |
10 | 司机室 | 1.50 | 4.00 | 6.00 | 16.30 | 24.45 |
11 | 变幅机构 | 7.09 | 0.60 | 4.25 | 18.50 | 131.17 |
12 | 起升机构 | 14.74 | -3.50 | -51.59 | 16.10 | 237.31 |
13 | 电气系统 | 6.00 | -1.52 | -9.12 | 16.02 | 96.12 |
小计(满载) | 203.33 | 925.15 | 4091.00 | |||
小计(空载) | 163.33 | -68.60 | 3201.27 | |||
14 | 圆筒门架 | 55.10 | 0.00 | 0.00 | 8.73 | 481.02 |
15 | 运行机构 | 27.50 | 0.00 | 0.00 | 1.12 | 30.80 |
16 | 梯子栏杆 | 8.52 | 0.00 | 0.00 | 10.62 | 90.48 |
17 | 锚定装置 | 0.38 | -2.40 | -0.91 | 0.44 | 0.17 |
18 | 防爬装置 | 0.80 | 0.00 | 0.00 | 0.78 | 0.62 |
19 | 电缆卷绕 | 0.82 | 5.80 | 4.76 | 4.22 | 3.46 |
小计 | 93.12 | 4.10 | 599.70 | |||
合计(满载) | 296.45 | 830.06 | 8039.72 | |||
合计(空载) | 256.45 | -74.37 | 4236.55 | |||

表2.2 门机最小幅度时各部分质量及质心位置
序号 | 部件名称 | 质量 |
| |||
Gi | Xi | Gi×Xi | Zi | Gi×Zi | ||
t | m | t∙m | m | t∙m | ||
1 | 起重量 | 40.00 | 10.00 | 400.00 | 22.00 | 880.00 |
2 | 吊钩总成 | 1.28 | 10.00 | 12.80 | 22.00 | 28.16 |
3 | 臂架总成 | 18.36 | 6.10 | 112.00 | 26.80 | 492.05 |
4 | 人字架 | 30.20 | -1.00 | -30.20 | 19.50 | 588.90 |
5 | 活对重 | 15.40 | -3.40 | -52.36 | 18.00 | 277.20 |
6 | 回转机构 | 11.12 | 0.00 | 0.00 | 14.20 | 157.90 |
7 | 转台 | 22.20 | -1.10 | -24.42 | 14.20 | 315.24 |
8 | 机器房 | 7.44 | -3.00 | -22.32 | 17.10 | 127.22 |
9 | 固定配重 | 28.00 | -6.00 | -180.00 | 17.30 | 519.00 |
10 | 司机室 | 1.50 | 4.00 | 6.00 | 16.30 | 24.45 |
11 | 变幅机构 | 7.09 | 0.60 | 4.25 | 18.50 | 131.17 |
12 | 起升机构 | 14.74 | -3.50 | -51.59 | 16.10 | 237.31 |
13 | 电气系统 | 6.00 | -1.52 | -9.12 | 16.02 | 96.12 |
小计(满载) | 203.33 | 138.26 | 4131.67 | |||
小计(空载) | 163.33 | -204.16 | 3214.33 | |||
14 | 圆筒门架 | 55.10 | 0.00 | 0.00 | 8.73 | 481.02 |
15 | 运行机构 | 27.50 | 0.00 | 0.00 | 1.12 | 30.80 |
16 | 梯子栏杆 | 8.52 | 0.00 | 0.00 | 10.62 | 90.48 |
17 | 锚定装置 | 0.38 | -2.40 | -0.91 | 0.44 | 0.17 |
18 | 防爬装置 | 0.80 | 0.00 | 0.00 | 0.78 | 0.62 |
19 | 电缆卷绕 | 0.82 | 5.80 | 4.76 | 4.22 | 3.46 |
小计 | 93.12 | 4.10 | 599.70 | |||
合计(满载) | 296.45 | 160.08 | 7959.68 | |||
合计(空载) | 256.45 | -189.77 | 4249.38 | |||

自重重心坐标计算公式:
 (2.1)
(2.1)
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: