1500吨小时抓斗卸船机拉杆系统设计及三维建模毕业论文
2020-02-19 19:20:53
摘 要
本文主要研究了桥式抓斗起重机的发展现状以及未来的发展趋势,对其进行了简要的分析。同时对岸桥抓斗起重机的抗颠覆稳定性和轮压进行了安全性分析,对岸桥起重机拉杆系统进行了三位建模设计和安全性校验。
关键词:岸桥起重机;轮压;抗颠覆稳定性;拉杆系统;三维建模
Abstract
This paper mainly studies the development trend of bridge grab cranes and the future development trend thereof , and briefly analyzes them. At the same time, the safety analysis of the anti-subversion stability and wheel pressure of the shore bridge grab crane was carried out, and the three-dimensional modeling design and safety check of the bridge crane rod system were carried out.
Key Words:Shore crane; wheel pressure; anti-subversion stability; tie rod system; 3D modeling
目录
第一章 绪论 1
1.1目的和意义 1
1.1.1设计的目的及意义 1
1.2国内外发展现状及趋势 1
1.3三维建模的发展和前景 2
1.4设计内容 3
1.4.1桥式抓斗卸船机总体设计计算 3
1.4.2完成岸桥起重机拉杆系统设计 3
第二章 总体设计计算 4
2.1自重载荷部分 4
2.1.1整机固定部分计算 4
2.1.2整机活动部分计算 5
2.1.3整机重量对轮压的影响(不考虑小车) 6
2.1.4小车产生载荷对轮压的影响 7
2.2风载荷部分 8
2.2.1风载荷的计算 8
2.2.2风压高度变化系数的确定 9
2.2.3风力系数的确定 9
2.2.4工作风压的确定 10
2.2.5迎风面积A的确定 10
2.2.6风载荷对轮压的影响 11
2.3轮压计算 12
2.3.1工作状态 12
2.3.2非工作状态 13
2.4抗颠覆稳定性验算 13
2.4.1起重机的破坏和失效形式 14
2.4.2抗倾覆稳定性的衡量指标 14
2.4.3基本稳定性 15
2.4.4动载工况下的稳定性 15
2.4.5非工作状态最大风载荷时的稳定性 18
2.4.6钢丝绳破断时的稳定性 20
第三章 拉杆系统设计与计算 21
3.1简化力学模型 21
3.2许用应力/长细比的计算 22
3.3拉杆系统的安全性校验 23
3.3.1前拉杆 23
3.3.2后拉杆 25
3.4其它工况下的验算 25
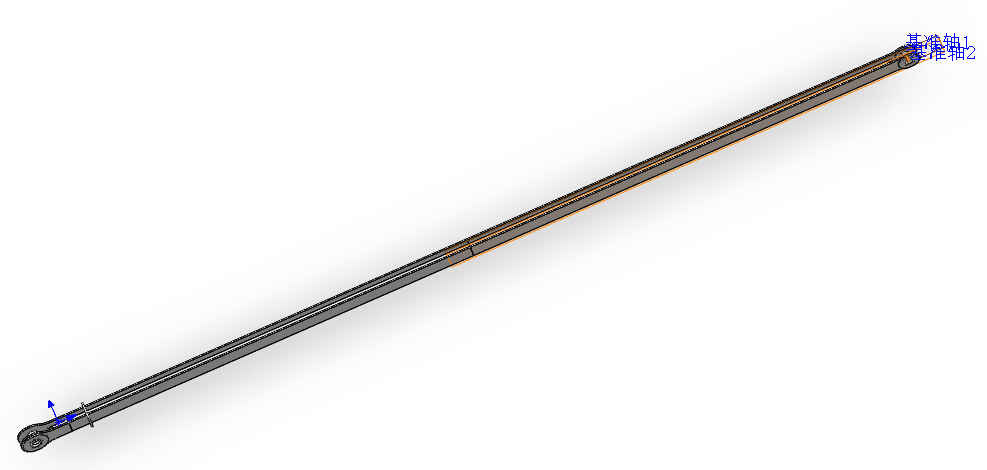
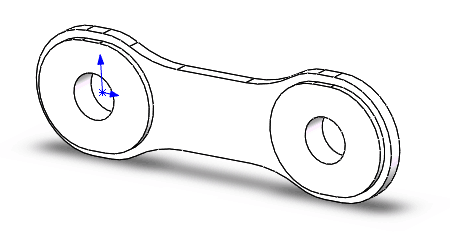
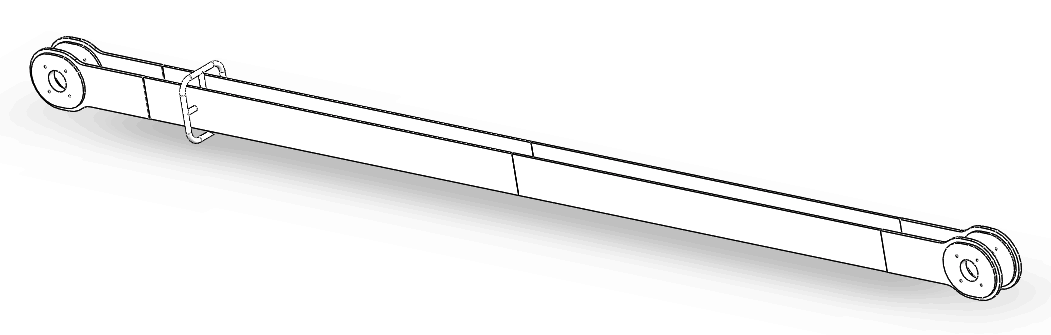
第四章 拉杆系统三维建模 27
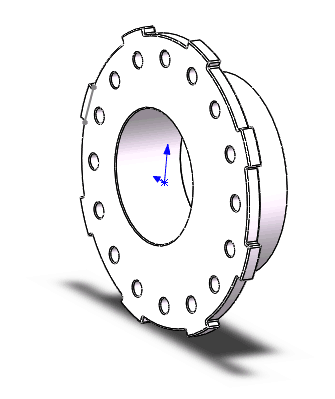
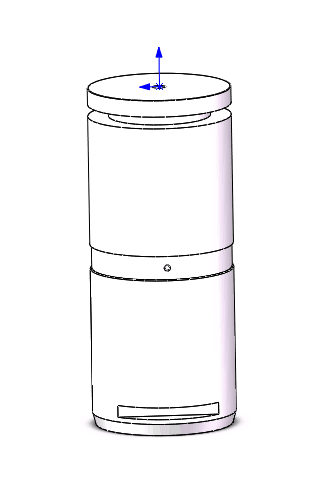
4.1拉杆系统零件三维建模 27
4.2拉杆系统的装配 30
第五章 总结与展望 31
5.1工作总结 31
5.2展望 31
5.3经济性与环保性分析 31
致谢 32
参考文献 33
附录 35
附录A 35
附录B 39
附录C 41
绪论
1.1目的和意义
1.1.1设计的目的及意义
希望通过毕业设计,一方面巩固自己大学以来学习的理论知识,加深对抓斗卸船机及其拉杆系统设计的了解,加强对CAD,solidworks的学习,提高自己的实践动手能力,为自己为以后的工作或者进一步深造打好基础;另一方面,通过查阅各类文献了解到港口机械行业的发展现状以及前沿的发展趋势,以规划自己的未来发展方向 。
1.2国内外发展现状及趋势
卸船机是港口卸载物料专用机器,它可把船舶上的散货物料运送到港口附近的传送带上,然后通过传送带将物料送到堆场。目前,散货卸船机按照作业方式和结构型式可以分为抓斗式和连续式。其中当前世界上散货接卸港口最主要的机械设备就是抓斗卸船机。
桥式抓斗卸船机传输的物料类型为固体货物,通常用于将固体货物从船舶运送到物料传送设备上,抓斗卸船机的工作过程为:钢丝绳与抓斗相连接,工作人员通过控制钢丝绳的的伸缩来控制抓斗的起升和张开关闭,使得抓斗能够掘起固体货物并沿着上横梁横向运动将固体货物运输至传送带上。其主要应用在各大固体散货物料码头,比如火力发电厂或者钢铁厂原材料港口。桥式抓斗卸船机对环境污染比较大,机身较为笨重且工作效率较其它装卸设备来说比较低,但其具有工作环境适应性较强、运营成本较低等特点,且抓斗卸船机已经发展多年,相应的技术更加成熟稳定,这使得抓斗卸船机成为国内外散货物料运输码头最主要的卸船机器。
如今港口飞速发展,我国散货物料的进出口快速增多,这对港口装卸设备的装卸效率提出了更高的要求,人工作业已经难以达到这种作业速度,因此,桥式抓斗卸船机正在往自动化的方向发展。
近几年,国内外交流变频调速这一技术取得了大踏步式的进步,在很大程度上促进了桥式抓斗卸船机的发展,通过交流变频调速控制系统不仅能够有效控制卸船机,还能及时发现卸船机的异常情况,从而确保卸船机正常工作。卸船机控制系统与变频控制进行有效结合,工作人员通过以太网能够及时了解系统实际情况,一方面避免了工作人员到现场进行观察,另一方面使得操作更加高效,提高了企业经济效益。但现阶段抓斗式卸船机电气控制系统的功能性及安全性仍然比较低,因而更需结合现有抓斗式卸船机运行过程中的缺点,不断优化电气控制系统的设计方案,以更加先进的电气控制理念及技术,促进抓斗式卸船机智能化发展进程。
此外在新形势下,客户对于环保提出了较高要求,需要技术人员对卸船机进行不断改进,使降尘技术得到提升,这样才能避免使得现场产生较大灰尘。 现在越来越多的厂家注重降尘设施,对技术进行更新,减少抓斗卸料现象的产生,避免出现粉尘溢出情况。从现有的情况来看,很多卸船机都运用三面挡风板高度技术,缺少对干雾降尘的重视,使得卸船机无法对灰尘 进行有效处理,这已经成为研究人员所要攻克的重要难题。
1.3三维建模的发展和前景
三维建模技术可以将现实中的物品和人在二维平面进行三维形态的模拟或再工 ,达到将美术设计和计算机技术有机结合的效果 ,给人立体真实的感受。计算机三维建模技术与计算机图形学关系密切 ,其核心是用计算机生成各种各样的三维图像。因其直观且接近现实的特点 ,三维建模技术被广泛应用于医学研究、零件设计、多媒体动画及游戏、地质研究等多个方面。
三维建模的发展与CAD的发展密不可分,CAD最初只应用于计算机平面辅助画图,后来才出现了三维模型的技术,它通过点和线之间的关系原理表示三维模型;为了增强三维模型的逼真程度,美国NASA公司研发出实体模型三维建模技术,不同于以往常用的曲面模型技术,实体模型具有更强的仿真效果,使得物体的实际特性能够在计算机中得到更好的表达,即在操作过程中,切去实体模型的某一块,实体模型会产生一个新的表面,而不会出现缺省必要线段的情形;到了上世纪末,计算机图形学发展成熟,三维建模进在此基础上得到了更大的发展,特征参数技术及变量化技术应运而生,该技术具有建模高效精确的特点,因此被广泛应用在机械零件等的设计中。它的工作机制就是充分利用了数学几何约束的特点,通过提前设定各个模型的参数来达到建模的效果。虽然此举大大提高了建模的效率和精确度,但建模的灵活度却大大减小,为此,特征参数技术及变量技术得到了进一步的完善和发展,现如今设计师可以在设定好特征参数的基础上确当设计条件,从而进行灵活的设计。
随着信息时代的不断发展以及第四次工业革命的到来,三维建模技术在未来将应用得更加广泛,比如应用于城市规划,通过模拟城市形态并根据规划成果进行修改进一步得到城市规划的科学依据;可用于城市管理,通过三维技术模拟楼层火灾等其它各种突发安全事故,从而给政府出台相应的防护措施提供科学依据,减小这类安全事故的发生几率;可用于虚拟现实技术,通过模拟真实世界中的三维模型,并对用户进行即时的反馈,带给用户心理和生理上近似真实的体验,例如应用于汽车仪表盘,这一方面可以大大减少用户的学习成本也增加了用户的安全。三维建模的未来发展方向主要体现在三个方面:数据多元化,多样化,人工智能化。
1.4设计内容
1.4.1桥式抓斗卸船机总体设计计算
了解桥式抓斗卸船机的应用领域、工作的要求、工作特点,熟知桥式抓斗卸船机结构、机构的形式及其优缺点。
(1)进行整机总体布置,估算各部分质量及质心位置和迎风面积及风力作用位置;
(2)完成整机稳定性校验,进行轮压计算。
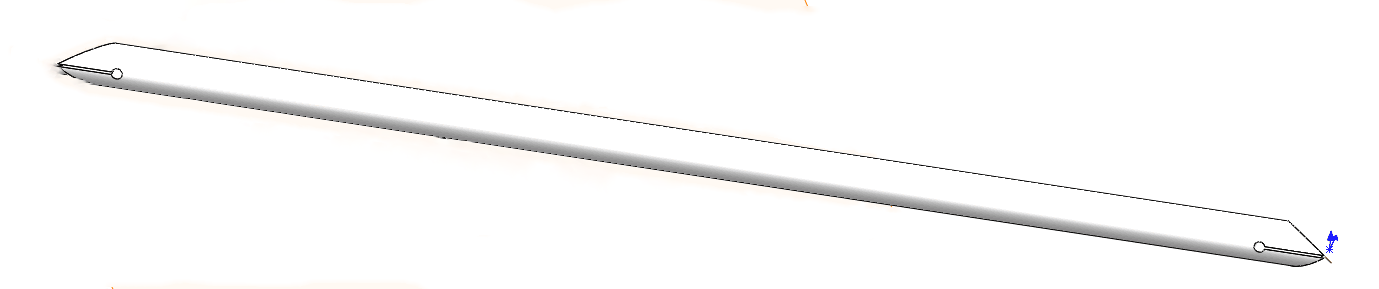
1.4.2完成岸桥起重机拉杆系统设计
(1)完成拉杆系统的设计计算;
(2)完成拉杆系统的三维建模。
第二章 总体设计计算
2.1自重载荷部分
由于在正常工作条件下,起重机部分结构相对位置固定,相对参考点的力矩不变,而另一部分结构如前臂梁、小车等相对参考点的力矩在不同工作状态下是不同的。为简化计算,可将起重机基本参数的计算分为固定部分和运动部分。
2.1.1整机固定部分计算
2.1.1.1建立坐标系
建立两个平面直角坐标系。坐标系--H:以海侧立柱中轴线与水平面的交点为原点,陆地指向海洋方向为正方向建立X轴,以与海侧立柱中轴线所在直线为H轴,正方向向上,建立平面直角坐标系--H。
坐标系--H:以陆侧立柱中轴线与水平面的交点为原点,陆地指向海洋方向为正方向建立X轴,以与铅垂线平行,方向指向正上方的有向线段为H轴,建立平面直角坐标系--H。
2.1.1.2计算过程
力矩:力对轴的矩是力对物体产生绕某一轴转动作用的物理量,其大小等于力在垂直于该轴的平面上的分量和此分力作用线到该轴垂直距离的乘积:
(2-1)
M——力矩;
F——作用力;
l——力臂。
在计算复杂构件相对某一点的力矩时,直接计算是比较困难的,这时如果将岸桥起重机分解为多个简单结构,先计算各个结构由于重力作用产生的力矩,再利用合力矩定理建立起整机力矩与各个组成结构力矩对同一点的矩之间的关系,便可以大大简化计算过程。
合力矩是多个力矩相加减得到的一个总力矩,这种力矩并不存在,它是以一种总力矩的形式呈现出来,也就是说合力只是力矩的合成的一个等价量,合成后合力矩代替了原来的若干个力的力矩。
合力矩定理:在平面汇交力系中,合力对平面内任意一点的力矩,等于其所有分力对于同一点的力矩的代数和,其计算公式如下:
(2-2)
F——合力;
X——合力对应的等效力臂;
Fi——分力;
Xi——分力对应的力臂。
经测量得到海侧上横梁的质量大小为21.238t,重心在坐标系-H中的坐标为(0,37.37m),在坐标系-H中的坐标为(14m,37.37m),根据力矩计算公式得:
其它结构的计算,计算过程同海侧上横梁一致,详细数据见附录。根据合力距定理,求得综上所述,岸桥起重机整机固定由于重力作用,相对于参考原点产生的力矩 , ,。
2.1.2整机活动部分计算
岸桥起重机的活动部分有:
前大梁总成部分:包括前大梁、梯子、小车轨道、前大拉杆、前小拉杆、俯仰滑轮、头部滑轮和其它部分;
小车总成部分:包括主小车、驾驶室、电缆托令、托绳小车。
2.1.2.1前大梁总成
当不计小车重量时,起重机在正常工作状态下,前大梁处于水平和最大仰起状态时,起重机所受到的轮压最大,若大梁处于水平和大梁处于最大仰起两个极端状态下,起重机所受轮压能满足安全性要求,则轮压满足安全性规范,故为简化计算,只需在这两个状态下检验轮压是否满足安全性要求。
根据力矩和合力矩定理可计算得到前大梁处于水平和仰起状态下,前大梁由于重力作用产生的力矩如表2.1所示,详细数据见附表。
表2.1整机自重产生的力矩
工况 | |||
前大梁水平 | 4094.7525 | 2816.93505 | 4463.58005 |
前大梁仰起 | 5833.3696 | 1792.31 | 3438.955 |
2.1.2.2小车总成
根据力矩和合力矩定理可计算得到小车处于不同工况下,小车由于重力作用产生的力矩如表2.2所示,详细数据见附表。
表2.2 小车自重产生的力矩
小车位置 | |||
大前伸距处 | 1076.5676 | 1004.474 | 1451.438 |
停机位置 | 1076.5676 | -80.933 | 366.03 |
最大后伸距处 | 1076.5676 | -775.377 | -328.413 |
2.1.3整机重量对轮压的影响(不考虑小车)
理想状态下,同侧车轮所受的轮压相等,虽然实际情况下起重机所受轮压受到多方面的因素的影响,比如:地面的水平度、粗糙度等等,但这些因素对轮压大小的影响相对大车对轮压的影响可忽略不计,按理想状态校验车轮的安全性,既大大简化了计算,又能满足实际工况的要求。
2.1.3.1陆侧轮压的计算
1. 大车受力分析:以原点为力矩平衡点,整机由于重力作用产生相对于点的力矩,同时整机还受到陆侧24个车轮与地面接触点处的支撑力作用。
2. 建立简化的数学模型:将大车简化为固定在一铰点处的杆件,杆件受力矩,受支撑力P,支撑力距离点14m,求P。
3. 计算:根据力矩的平衡定理得,陆侧轮压:
(2-3)
L——轨距;
n——陆或海侧轮数。
2.1.3.2海侧轮压的计算
1. 大车受力分析:以为力矩平衡点,整机由于重力作用产生相对于点的力矩,同时整机还受到陆侧24个车轮与地面接触点处的支撑力作用。
2. 建立简化数学模型:将大车简化为固定在一铰点的杆件,杆件受力矩,受支撑力Q,支撑力距离铰点14m,求Q。
3. 计算:海侧轮压:
(2-4)
L——轨距;
n——陆或海侧轮数。
2.1.3.3计算
见附录,根据附录中的数据,求得不同工况下的海陆侧轮压如表2.3所示:
表2.3 整机自重引起的轮压
(i)工况 | 陆侧轮压 | 海侧轮压 |
(1)前大梁水平 | 26.87 | 20.60 |
(2)前大梁仰起 | 29.92 | 17.56 |
2.1.3.4漏斗和物料对轮压的影响
漏斗物料总重112.5t,漏斗离海侧中心2.5m。由漏斗物料引起的轮压大小:
陆侧轮压
海侧轮压
2.1.4小车产生载荷对轮压的影响
现单独讨论活动部分小车在不同状态下对轮压的影响,小车在工作状态下由三个极端工作状态:小车在最大前伸距处、小车在停机位置、小车在后大梁最大后伸距处。为简化计算只需要讨论小车在这三个状态下所受到的轮压。
根据力矩得平衡公式可得:
海侧轮压:
(2-5)
陆侧轮压:
(2-6)
L——轨距,此处L为14m;
n——陆或海侧轮数,此处n 为24。
经过测量计算后不同工况下海陆侧轮压如表2.4所示:
表2.4 小车自重引起的轮压
(i)小车工况 | 陆侧轮压 | 海侧轮压 |
(4)最大前伸距处 | -2.99 | 4.32 |
(5)停机位置 | 0.24 | 1.09 |
(6)后大梁最大后伸距 | 7.91 | -1.68 |
2.2风载荷部分
露天使用的起重机应顾及到风载荷的作用,出于安全性考虑,应事先假设风载荷是静力载荷,方向为水平方向上使起重机最可能发生倾倒的方向,考虑风载荷对起重机的影响并进行计算时,应该考虑工作状态以及非工作状态这两种工况。
2.2.1风载荷的计算
影响风载荷大小的因素众多,包括起重机工作场地风力系数大小、风压的大小、计算部件的迎风面积等。作用在起重机上的风载荷大小随起重机工作场地风力系数大小、风压的大小、计算部件的迎风面积等的增大而增大,可按照下式计算:
(2-7)
WLO——作用在起重机或货物上的风载荷;
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: