基于Creo平台的MQ1630门座起重机平衡梁结构设计毕业论文
2020-02-19 19:23:02
摘 要
本文借助三维建模软件Creo首先针对MQ1630门座起重机平衡梁结构进行了三维建模仿真,得出了平衡梁的三维模型,然后将模型导入ANSYS进行静力学分析,通过计算平衡梁受力最危险的时候,即平衡梁处于水平位置时的应力应变情况,ANSYS静力分析表明此时应力应变在安全范围以内,最终得出设计模型满足设计要求的答案。
论文主要研究了运用三维建模软件以及ANSYS静力分析设计MQ1630门座起重机平衡梁结构的设计过程。
研究结果表明:三维建模仿真加上ANSYS静力分析能满足设计要求。
本文的特色:三维建模采用Creo来完成,应力应变校核采用ANSYS静力分析。
关键词:门座起重机平衡梁;三维建模;有限元静力分析。
Abstract
In this paper, with the help of three-dimensional modeling software Creo 3.0, the three-dimensional modeling and Simulation of the balancing beam structure of MQ1630 portal crane are carried out, and the three-dimensional model of the balancing beam is obtained. Then the model is imported into ANSYS 17.0 for static analysis. By calculating the stress and strain of the balancing beam when it is in the most dangerous position, the ANSYS static analysis shows that the stress should be at this time. Change within the safe range, and finally get the answer that the design model meets the design requirements.
This paper mainly studies the design process of balancing beam structure of MQ1630 portal crane by using three-dimensional modeling software and ANSYS static analysis.
The results show that the three-dimensional modeling and simulation combined with ANSYS static analysis can meet the design requirements.
Features of this paper: Three-dimensional modeling is completed by Creo, and stress and strain checking is carried out by ANSYS static analysis.
Key words: balance beam of portal crane; three-dimensional modeling; finite element static analysis.
目录
摘要 I
Abstract II
第一章 绪论 1
1.1 课题的研究目的和意义 1
1.2 国内外研究现状 2
1.3 课题研究内容和预期目标 4
第二章 总体设计计算 5
2.1 性能参数 5
2.2 确定组合式臂架四连杆尺寸 6
2.3 用作图法进行货物水平位移补偿系统设计 6
2.3.1 刚性四连杆组合臂架方案的图解法设计 6
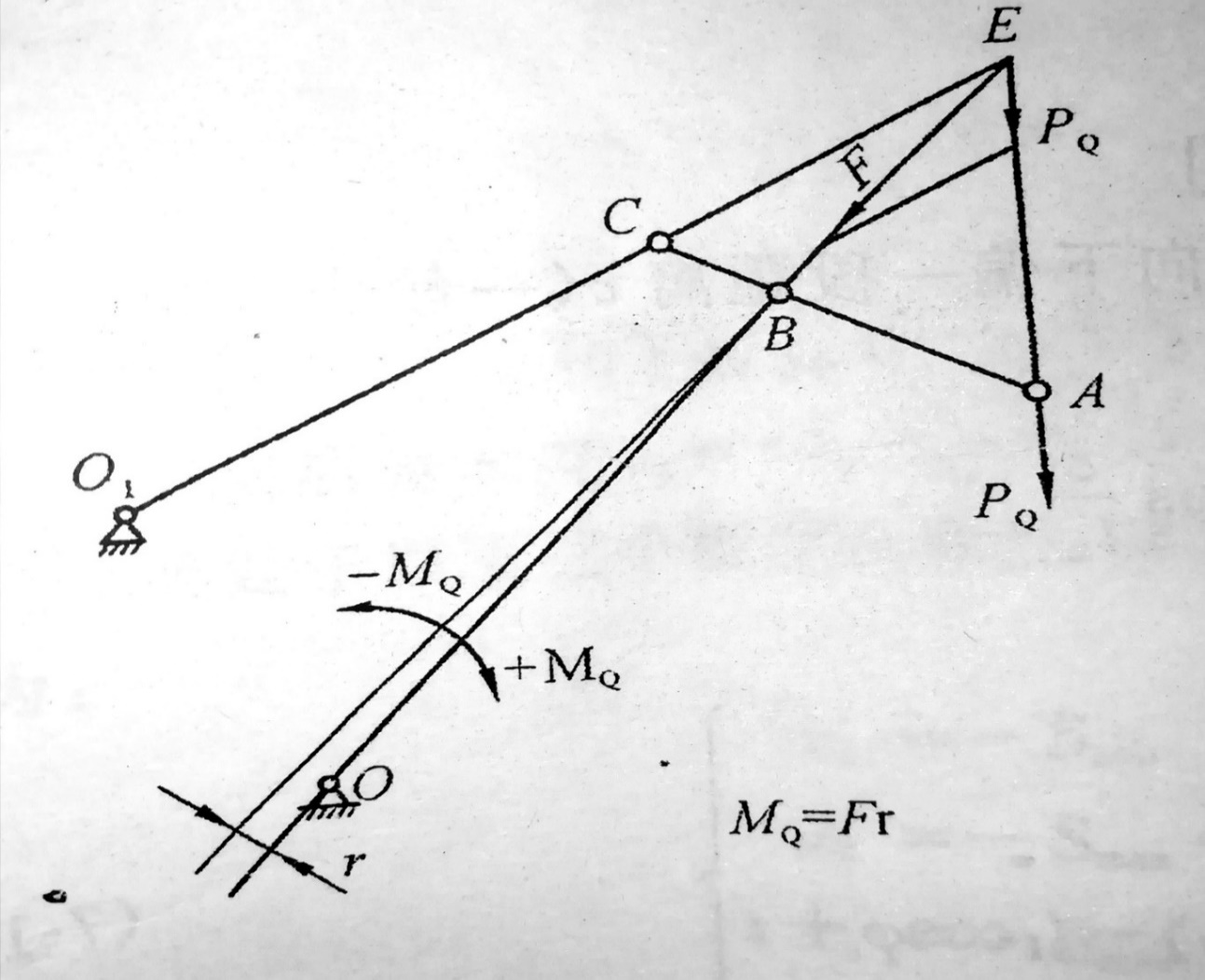
2.4 杠杆-活对重臂架自重平衡系统设计 13
2.4.1 杠杆-活对重法臂架自重平衡系统的设计方法 13
第三章 平衡梁三维建模和静力学分析 16
3.1 平衡梁三维建模 16
3.2 静力学分析 17
3.2.1 平衡梁工况和载荷 17
3.2.2 ANSYS静力学分析 18
3.3 导出工程图 23
3.4 本章小结 26
第四章 全文总结与展望 27
参考文献 29
致谢 31
第一章 绪论
1.1 课题的研究目的和意义
随着港口的日益发展,港口对港口机械要求也越来越高。一直以来,工程机械的设计制造都遵循着设计-计算-出图这样一个静态的过程,对于工程机械本身的三维实体结构不作深究。一方面是技术的局限性,另一方面则是长久以来的固定设计思维。随着科技的日益发展,尤其是计算机网络技术的发展,各式各样的工程设计软件出现在我们面前,他们可以应用于机械设计的各个流程,如CAD,SolidWorks,ANSYS等等,对工程设计人员来说,它们的帮助是巨大的,不仅减轻了计算方面的强度,同时还让我们对设计的全过程有了更加直观、更加深入地认识。
尤其是三维设计造型软件,它的出现,可以使工程设计者们像在真实世界中一样,从各个角度、以多种方式进行产品设计、开发以及产品的技术研究,然后利用其特征造型功能,逼真的演示产品各零部件的装配关系和运动过程。
通过三维造型软件Creo完成了对门座起重机平衡梁的参数化设计和虚拟装配,通过装配得来的模型也为ANSYS静力学分析提供了有限元分析基础。通过ANSYS静力分析来纠正模型的错误,进行模型的修改,再次分析,再次修改,以如此双向的过程最后得出最合适的模型结构和静力分析结果。这大大缩短了设计研发的周期,降低了产品生产成本,提高了效率,加强了市场竞争力。
在本次设计中,我们小组的任务是MQ1630门座起重机的各个方面的设计,包括总体、象鼻梁、拉杆、臂架、平衡梁、门架、均衡梁等。我的任务是平衡梁结构设计,在此次设计过程中,我将进一步的熟悉门座起重机的设计方面的相关知识,对以前所学的知识进行一个全面的总结和运用,做到更深层次的研究。此次设计我先进行平衡梁结构各零部件的建模,然后进行虚拟装配,在此过程中将熟悉三维建模软件Creo的使用。下一步进行ANSYS静力学分析,通过这一步,我加强了以前的有限元课程的认识和理解,同时对ANSYS有了更深入地掌握。通过对上述过程的一步步实行,本次毕业设计将会使我积累宝贵的经验,对今后的学习和工作起到非常重要的作用。
1.2 国内外研究现状
随着我国加入世贸组织,国际贸易的快速发展促进了我国港口运输的快速增长,也促进了港口机械设备的发展。门座起重机作为码头装卸、搬运和堆垛作业的专用机械设备,具有效率高、成本低、柔性强、通用性强等优点。这些优点使门座起重机在港口码头得到了广泛的应用。近年来,随着现代工业的快速发展和国际贸易的激烈竞争,对港口装卸机械设备提出了更高的要求。因此,门式起重机的设计应朝着规模化、高速化、自动化、智能化的方向发展,以满足日益激烈的市场竞争的需要[7]。
在国外有15家门座起重机的专业制造商。其代表厂商主要有日本利勃海尔、德玛格、马尼托瓦克、圣昂等。他们的产品型号齐全,技术先进,市场占有率高[7]。
在小吨位起重机设计领域,我国一直处于世界领先地位,但在大吨位起重机的研发方面,我国与国外仍存在一定差距。从技术上讲,我国发展大型门座起重机的时间相对较短,设计水平亟待提高。经验表明,国产门座起重机的可靠性和稳定性不如国外品牌。目前,我国仍面临两大问题:核心部件技术水平不足和制造水平不足以满足设计要求[7]。
随着技术的进步与科技的发展,目前国内外门座起重机的整体发展趋势已经向四个方面呈现:降低产品的生产成本、面向大型化,高速化和专用化发展、提高产品的自动化、智能化和数字化程度、采用仿真与虚拟设计技术[7]。
在门座起重机中,四连杆组合臂架系统由臂架、象鼻梁和达拉干三部分组成,连同机架一起构成一个平面四连杆机构,并与其支承构件人字架、转台等形成四连杆平面机构,实现变幅过程中象鼻梁端点的水平移动。四连杆组合臂架的设计目标是再已知幅度参数的情况下,尽量求得最佳的货物水平位移性能和最小的货物未平衡力矩;与此同时,为了使起重机在变幅过程中,臂架系统的重心尽量不发生高度变化,以减少功率的消耗,,所以采用臂架自重平衡的方法,降低臂架系统的势能变化。在设计过程中,臂架系统的任何参数变化都会影响门座起重机的设计,如各结构的大小,长度,钢结构的形式以及重量大小等,在设计中这些因素都是需要考虑的,只不过根据轻重优先考虑重要的环节。
起重机的优化设计一直是国内外研究的热点,曹三平在门座起重机的优化中,他的目标是通过优化臂架的钢结构,以达到优化的目的,首先,他确定了臂架的钢结构为桁架结构,然后通过对比无竖杆腹杆体系和有竖杆腹杆体系的优缺点选择了前者。之后通过建立三维实体模型的方式,分析了起重机六种不利工况的荷载组合和荷载情况,根据门式起重机的特点,列出了不同工作范围的起重机五种工况,并建立了子模型。另外,通过它的有限元强度分析并建立了各工况的应力云图。最后,在满足结构强度、刚度和稳定性要求的前提下,经起重机优化设计后,门架和转台的重量比原设计减轻约15% [1]。而曹娜则是以臂架系统的结构尺寸为依据,使用MATLAB进行优化求解,根据优化后的结果设计改造方案,然后利用UG软件对改进后的臂架系统进行三维建模,并利用ANSYS软件对其关键部件进行静强度检测。经过优化后,仍能满足静强度要求[5]。同样的,还有在臂架四连杆方面的优化[6],通过电控系统改造、开发CAD系统在起升机构上的优化[9],采用遗传算法在四连杆变幅系统的优化[12],以及其他一些方面的优化设计。
故障分析和安全生产也是讨论的热点。李勇智、魏东从轮压进行分析,对起重机的打滑情况进行验算,虽然轮压与四连杆设计相去甚远,但是起重机的驱动轮轮压是由幅度、火种及其偏摆水平力、风载荷以及臂架旋转位置等因素而随机确定的,对四连杆臂架系统的设计具有一定的参考作用。该文所描述的滑动可靠度计算方法是对基于最小驱动轮压力的滑动可靠度计算方法的一种改进,它更严格,更难以满足要求。更符合门式起重机的实际工作条件[4]。马思群、马瑞、孙彦彬、兆文忠以故障入手,在分析臂架系统时以象鼻梁为例,采用FMECA方法进行分析,给出了门座起重机的几种故障模式,对设计者提供了一定的设计方向来进行规避,同时为企业用户今后的使用和维护提供了重要参考。[3]。Francesco Frendo从一次事故入手,对风载荷对起重机造成的影响进行了详细的分析[16]。还有其他诸如回转支撑轴承的故障分析[8]。
随着个人电脑的普及以及网络的飞速发展,利用各种设计分析软件和新方法迅速取代了之前的传统方法。Leszek Sowa, Zbigniew Saternus, Marcin Kubiak利用ANSYS软件对起重机的梁进行应力应变分析[17]。A. Lobe, A. Ettl,A. Steinboeck, A. Kugi在基于平面度的三维门式起重机非线性控制研究中,采用了一种基于柔性的三维门式起重机控制方案[15]。仿真软件的应用,对于了解起重机在各种工况下的动态特性,提高起重机的工作性能和可靠性有非常大的帮助。
同时,也有一些谈及到了我所要研究的课题——门座起重机平衡梁,平衡梁是用来平衡臂架四连杆系统起升变幅时产生的不平衡力矩,通常由一个活对重和连杆组成。例如吴启超、沈家桢、宓为建从断裂的平衡梁出发,讲述了平衡梁的设计制造,应力应变分析以及一些参数计算分析得出了平衡梁维护保养的一些结论。通过文中给出的结论,我们知道了平衡梁在使用过程中会对臂架的下铰点产生非常大的自重力矩,在设计时,我们可以根据这些来有意识地进行防范和优化[2]。另外,随着起重货物的增加增重,与之相伴的大型吊具的使用,对平衡梁的要求也随着提高,从安装工艺出发,马定君详细介绍了门座起重机变幅系统的整体安装方案分析,包括臂架、象鼻梁、对重平衡梁、大拉杆等。最后得出结论,在门机安装施工资源配置不足的情况下,通过改变安装工艺和吊装方法,可以实现安全吊装和施工成本[10]。所有的这些研究都对门座起重机的发展以及性能提升提供了巨大的帮助。
1.3 课题研究内容和预期目标
在此次设计过程中,我们小组将首先分析门座起重机的基本参数并参照相关的设计手册和资料进行总体设计计算,得出变幅机构平面四连杆各部件的参数,然后进行分工工作负责各个部分的任务,我将完成平衡梁的参数计算以及三维建模,这之后将所建立的模型导入ANSYS进行静力学分析,分析结果符合要求后导出3张A3图纸,完成所有设计过程。
第二章 总体设计计算
2.1 性能参数
起重机的技术参数表示起重机的作业能力,是设计起重机的重要依据。进行港口机械的设计时,需要根据港口的具体情况来确定起重机的各项性能参数。本次的MQ1630的主要性能参数件表2.1。
表2.1 主要性能参数表 | |||
项目名称 | 性能参数 | ||
起重量 | 抓斗/吊钩 | 吊钩 | |
16t | 25t | ||
工作幅度 | 最大 | 30m | 22m |
最小 | 9m | ||
起升高度 | 轨上 | 16m | 26m |
轨下 | 10m | 10m | |
轨距 | 10.5m | ||
基距 | 10.5m | ||
机构工作速度 | 起升速度 | 55m/min | 35m/min |
回转速度 | 1.4r/min | ||
变幅速度 | 50m/min | ||
行走速度 | 26m/min | ||
计算风速 | 工作状态 | 20m/s | |
非工作状态 | 55m/s | ||
工作级别 | 整机 | A7 | |
变幅机构 | M7 | ||
起升机构 | M7 | ||
回转机构 | M7 | ||
运行机构 | M4 | ||
2.2 确定组合式臂架四连杆尺寸
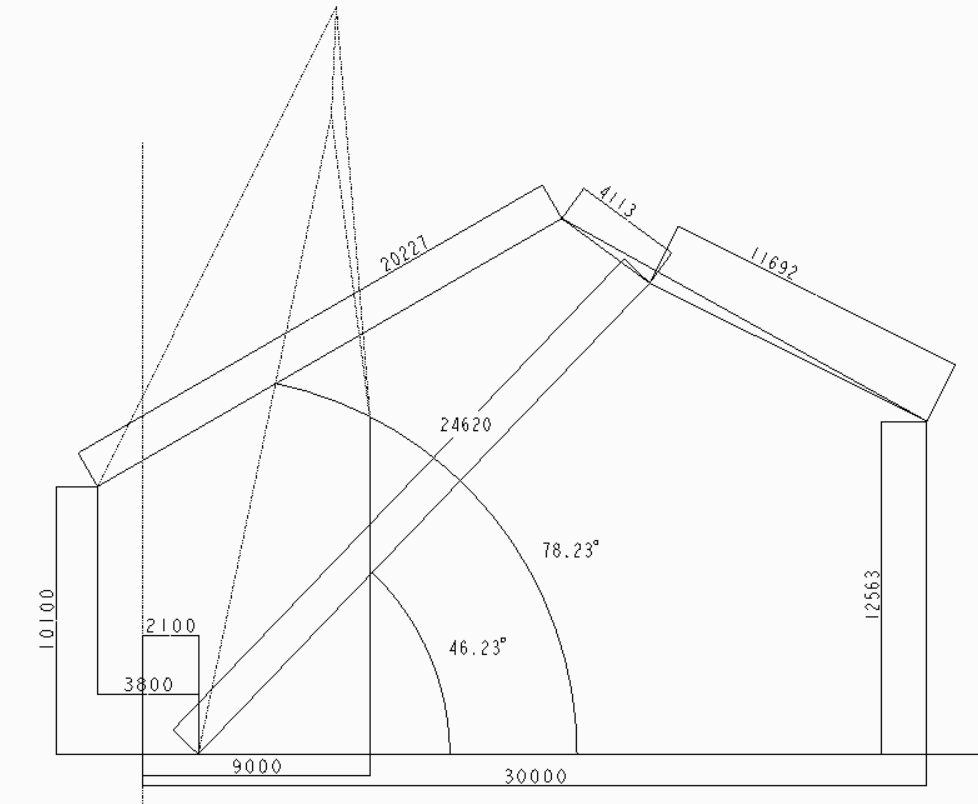
图2.1 组合臂架系统尺寸
2.3 用作图法进行货物水平位移补偿系统设计
在本次设计中,采用刚性拉杆组合臂架补偿系统。
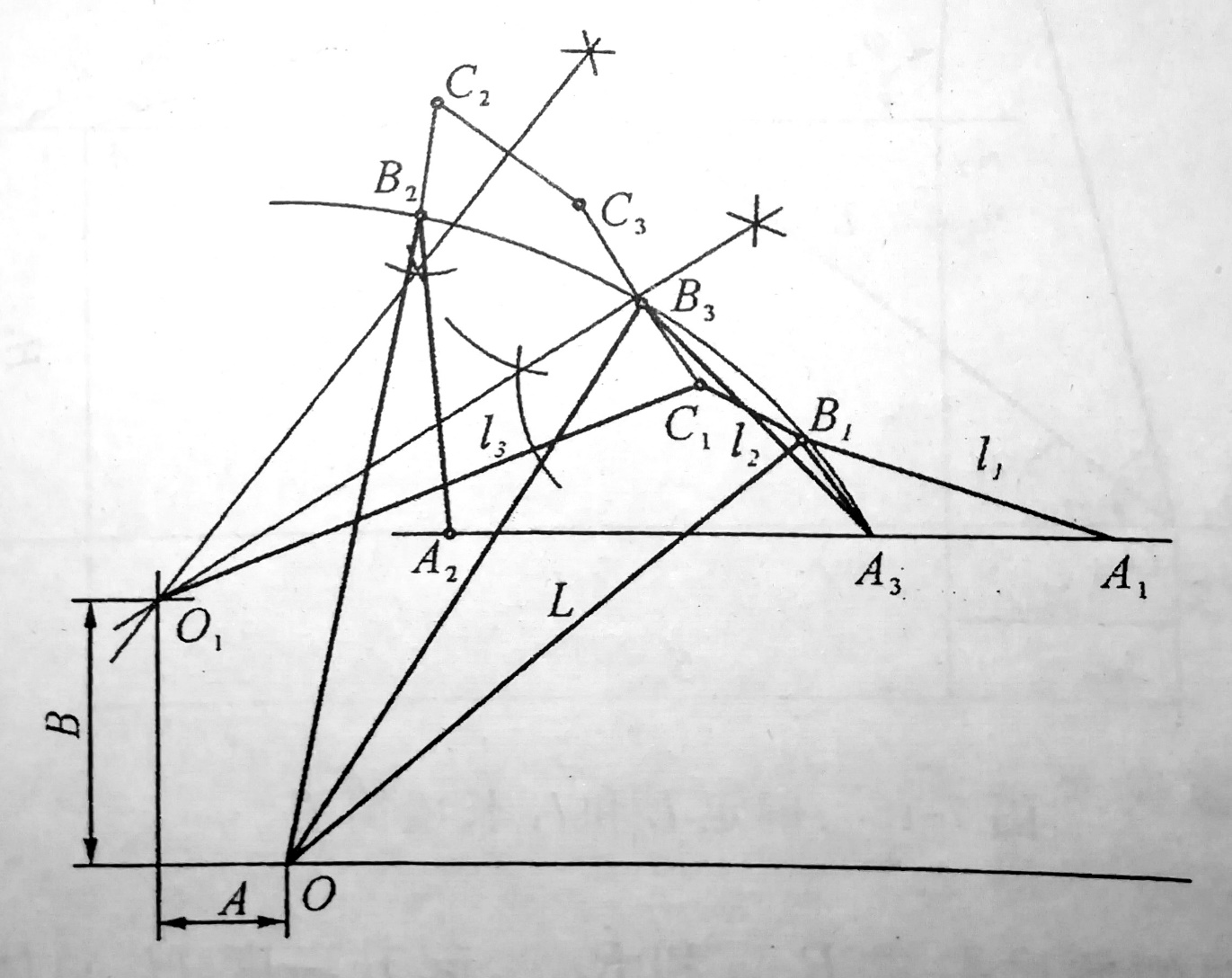
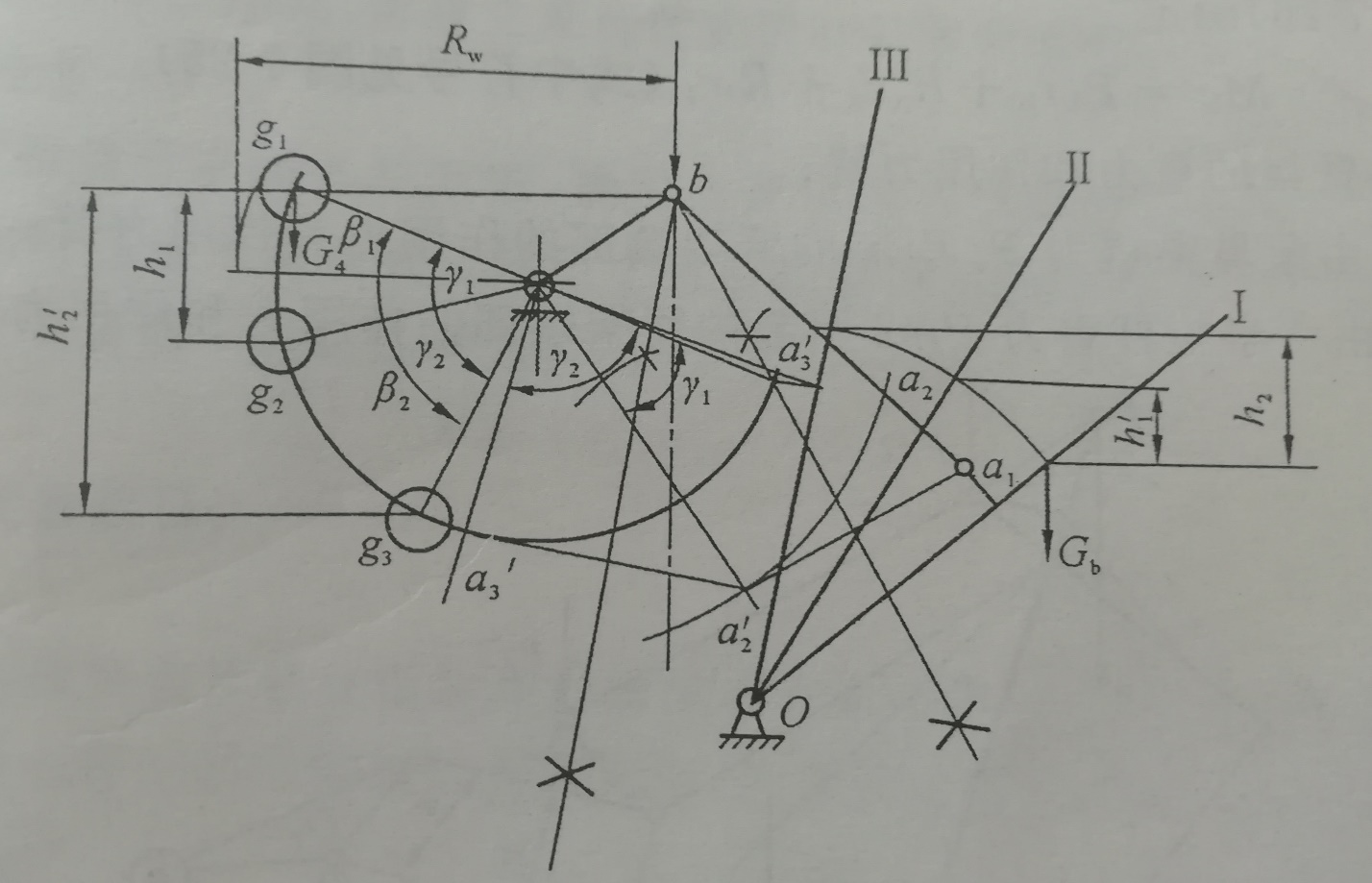
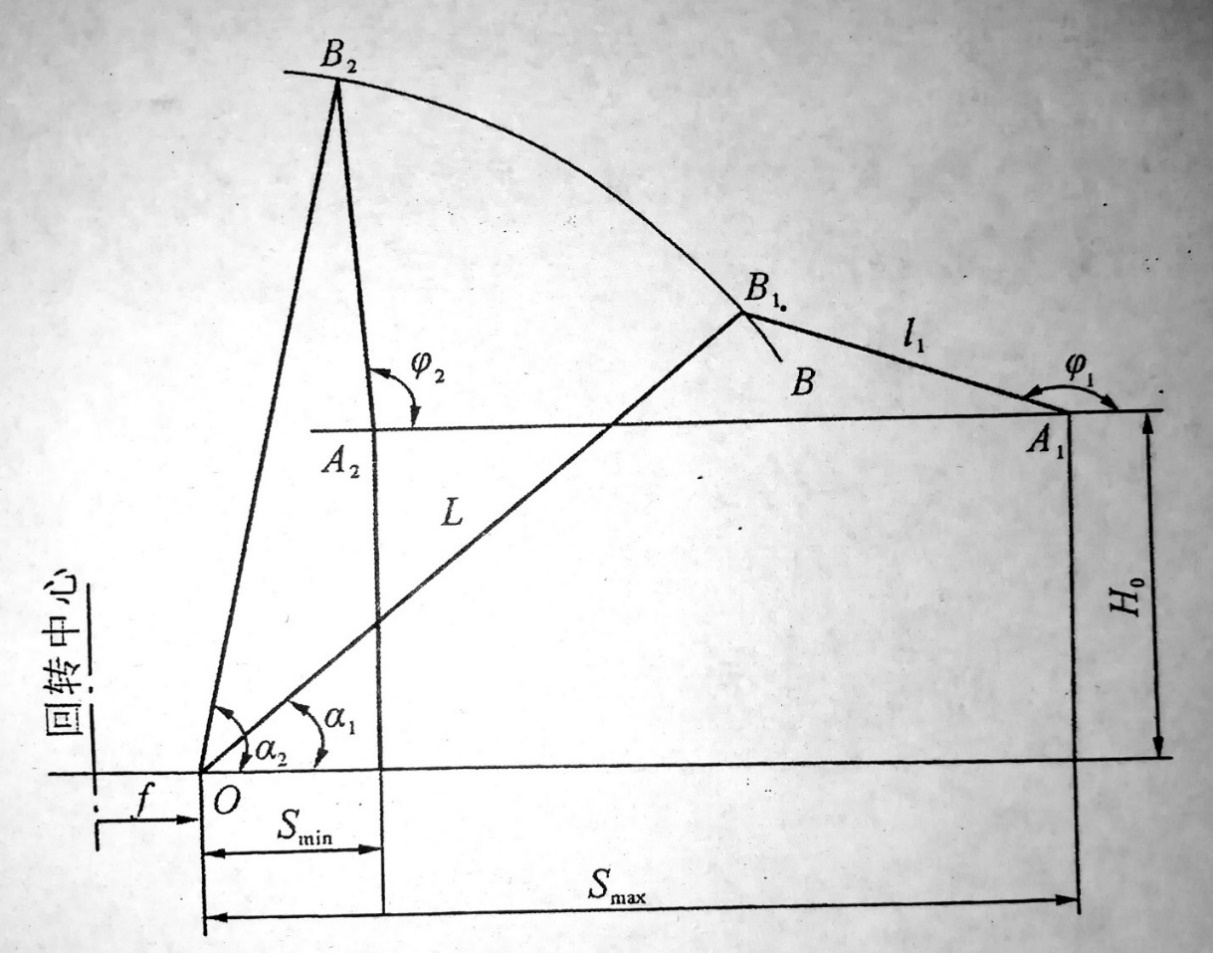
2.3.1 刚性四连杆组合臂架方案的图解法设计
1)根据设计任务书中所给定的最大和最小工作幅度,起升高度等要求,我们可以初定臂架下铰点O的位置。根据老师传授的经验,选f=2.1m,然后由起升高度可以算得O点到象鼻梁顶端的距离H0。
2)求解臂架长度L和象鼻梁前段长l1,起升倍率mq=2,得到Smax=Rmax-f=27.9m;
Smin=Rmin-f=6.9m,然后根据象鼻梁端点在最大幅度和最小幅度时候,它们的轨迹处于同一条水平线上,确定A1和A2点,求解L和l1。
初步确定Rmin时的φ2和α2。φ2通常取为95°~102°;α2一般取75°~82°。本次设计中初定L=24.7m、l1=11.7m、α1=46.23°、α2=78.23°、φ1=153.51°、φ2=97.23°。如图2.2所示。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: