面向星球探测的机器人切割任务规划及控制技术研究毕业论文
2020-02-19 19:24:58
摘 要
随着我国航天技术的不断发展,国家对探月的要求也越来越高,在未来两年内的任务为在月面上采集岩石样本。机器人由于具有较高的灵活性和较强的自主能力,能满足空间操作诸多需求。
本文使用基座固定的机器人实验平台,模拟月面上机器人识别机械臂所需运动的轨迹并进行相应的操作,采用理论与实验验证相结合的研究方式,研究了机器识别和机械臂的轨迹规划等问题,旨在为机器人切割岩石任务提供一套基础的理论方法。
本文的具体研究与工作内容包括:
(1)提出切割岩石任务的具体工作流程,在此基础上确定了在机器人切割任务规划及控制研究中,主要进行的是机器视觉算法和机械臂轨迹规划研究。
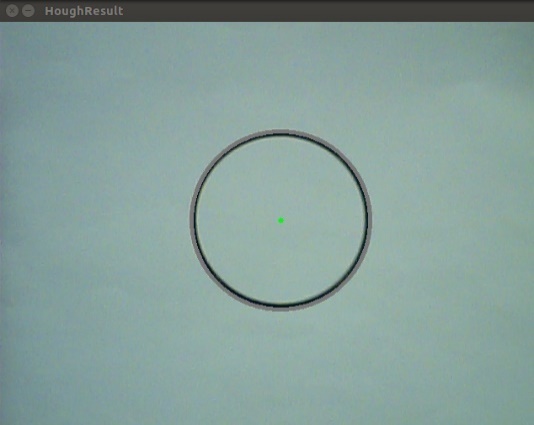
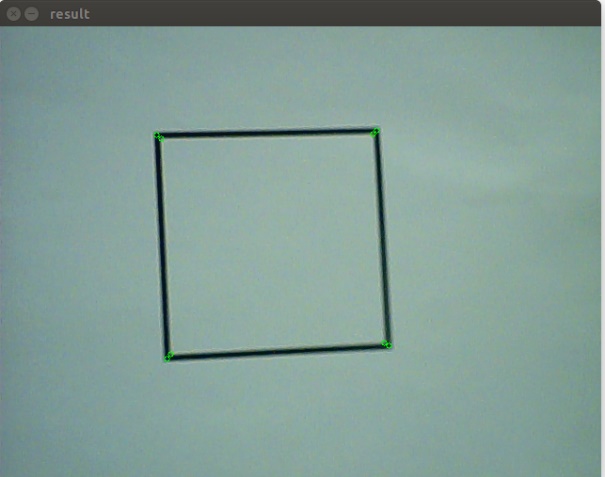
(2)针对任务背景,选择符合任务要求的机器视觉识别算法:边界跟踪、霍夫圆变换和角点检测。并对其进行实验验证,在用户计算机中输出识别结果,为后续研究奠定基础。
(3)根据任务需求,在笛卡尔空间和关节空间同时进行轨迹规划,为了适应实际操作过程中机械臂可能无法自主完成的情况,设计了键盘控制,并进行实验验证。
(4)基于现有平台,通过ros将各节点联系起来,进行整个系统的实验验证。
关键词:霍夫圆变换;角点检测;轨迹规划;键盘控制
Abstract
With the continuous development of China's space technology, the country's requirements for lunar exploration are getting higher and higher. The task in the next two years is to collect rock samples on the lunar surface. Due to its high flexibility and strong autonomy, the robot can meet the needs of space operations.
In this paper, the robotic experimental platform fixed by the pedestal is used to simulate the trajectory of the required movement of the robot on the lunar surface and the corresponding operation. The combination of theory and experimental verification is used to study the trajectory planning of the machine identification and the manipulator. Other issues are intended to provide a basic theoretical approach to robotic rock cutting tasks.
The specific research and work content of this paper includes:
(1)The specific workflow of the task of cutting rock is put forward. On the basis of this, it is determined that in the research of robot cutting task planning and control, the main research is machine vision algorithm and manipulator trajectory planning research.
(2)For the task background, select the machine vision recognition algorithm that meets the task requirements: boundary tracking, Hough circle transformation and corner detection. And experimental verification, output recognition results in the user's computer, laying the foundation for subsequent research.
(3)According to the task requirements, the trajectory planning is carried out simultaneously in the Cartesian space and the joint space. In order to adapt to the situation that the mechanical arm may not be able to complete itself during the actual operation, the keyboard control is designed and verified by experiments.
(4)Based on the existing platform, each node is connected by ros, and the whole system is experimentally verified.
Keywords: hough circle transformation;corner detection;keyboard control;trajectory planning
目 录
1 绪论 1
1.1 研究背景及意义 1
1.2 国内外研究现状 2
1.2.1机器视觉识别 2
1.2.2 轨迹规划 2
1.3 本文主要研究内容 3
2 切割区域的识别与定位 4
2.1 机器视觉识别 4
2.1.1 识别原理 4
2.1.2识别过程 4
2.2切割区域的识别 5
2.2.1 数字化二值图像 5
2.2.2 边界跟踪 7
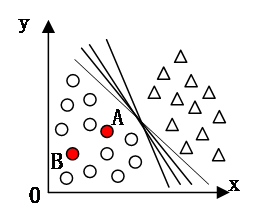
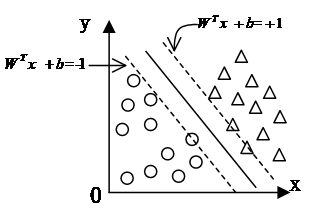
2.2.3 SVM(支持向量机) 8
2.3 切割区域定位 9
2.3.1 霍夫圆变换 10
2.3.2 角点检测 12
2.3.3 坐标定位 14
2.4 本章小结 14
3 切割任务的轨迹规划 15
3.1 轨迹规划概述 15
3.2关节空间轨迹规划 15
3.3 笛卡尔空间轨迹规划 17
3.3.1 直线轨迹规划 17
3.3.2 圆弧轨迹规划 18
3.4 机械臂实时操控研究 19
3.5 本章小结 20
4 实验设计与验证 22
4.1 实验验证方案设计 22
4.1.1 系统介绍 22
4.1.2 切割任务流程设计 24
4.2 实验验证及结果分析 25
4.2.1图形识别及定位验证 25
4.2.2轨迹规划验证 27
4.2.3 切割任务规划与控制验证 27
4,3本章小结 28
5 总结与展望 29
5.1 本文总结 29
5.2未来展望 29
6 环境影响和经济性分析 31
参考文献 32
致谢 34
1 绪论
1.1 研究背景及意义
第二次世界大战后,人类从未停止过对宇宙的探索,但是在很长时间里,中国在太空探索方面只能作为一个看客。2018年12月,中国的嫦娥四号探测器成功在月球背面着陆,这是中国探索宇宙的一个里程碑[1]。在未来两年内,采集月球岩石陨石样本是中国探索月球的规划之一,这有利于我们了解月球发展历史,探索太空奥秘。但在月球上,航天员行动不便,处于真空状态下的航天员进行切割作业,危险系数会极大提高,因此需要能满足切割操作要求的机器辅助完成[2][3]。
50多年前,人类将机械的概念推广到机器人领域,当时,人们第一次控制机械臂完成任务。1980年机器人在发达国家的工业领域广泛使用,因此被称为机器人元年。机器人技术兴起于汽车领域,但随着计算机技术和控制理论的发展,机器人已经进入到我们的日常生活中,如教育行业、服务业等。近十年随着大数据、人工智能等技术的出现,加速了机器人的推广进程。机器人技术是集机械、自动化、AI等领域的综合技术,具有许多优势,其在制造领域的使用尤为广泛,我们可以看到,在具有简单、重复等特点的任务中,经常出现机器人的身影。在航天航空领域,机器人也正发挥着越来越重要的作用。
在岩石切割与采集任务上,具有冗余自由度的机器人能较好的满足需求,配合摄像头模块的使用,能实现机械臂切割轨迹规划。为了更进一步了解月面机器人切割岩石样本的控制过程,实现机器人切割岩石这一过程的规划,本论文将通过模拟月面机器人切割岩石的动作,通过机器视觉识别特定形状,进行机器人切割岩石任务规划及其控制研究。
1.2 国内外研究现状
1.2.1机器视觉识别
从上世纪80年代开始,机器视觉识别技术在快速发展。机器视觉识别与人眼识别原理相似,通过摄像头对图像信息进行获取,将图像信息进行预处理,最后对形状的特征值进行匹配[4],但在这过程中,不同的处理方法识别的准确率不一样。在机器视觉识别形状的研究中,较为常见的是霍夫变换及基于图形轮廓特征的识别。史思琦对机器识别轮廓特征进行研究,通过对含有噪声的轮廓进行平滑预处理,利用图形的曲率将待识别的区域划分为特征区域和非特征区域的方法提高识别的准确率[5]。崔晓洁等人则通过运用霍夫变换原理对环形交叉口进行识别,通过霍夫变换栅格数据识别出矢量圆环,计算出圆心位置,再通过对支路的判别进行环形交叉口的识别,而霍夫变换的原理是利用点与线的对偶性,将原始图像曲线通过曲线表达式转换为参数空间的一个点。这样就把原始图像中给定曲线的检测问题转化为寻找参数空间中的峰值问题[6]。Mr. Suhas G. Salve等人通过对形状上下文的描述,引入形状描述符,通过指定边界形状特定点,实现能够识别被部分遮挡的物体[7]。A. Yu. Dorogov通过对计算机获取的位图图像转换为矢量图图像,通过计算几个点之间的坐标位置,找到了物体的中点[8]。A. M. Nickfarjam等人通过使用尺度不变特征变换和霍夫变换相结合来实现图像之间的匹配,提高了匹配的准确度[9]。Kubra SAKA则通过对图像的拐点进行分析,来实现形状的识别,如三角形为三个拐点,矩形为四个拐点[10]。张野等人运用更深层次的Inception-v3 深度卷积神经网络模型对几种类型的岩石进行识别,通过机器深度学习岩石表面的纹理形状,建立迁移模型,最终实现了岩石的识别与分类[11]。当前,机器识别也被运用于许多地方,如人脸识别和指纹识别,大部分都是基于图像的识别方法,通过建立大量的样本数据完成复杂的形状识别。
1.2.2 轨迹规划
轨迹,是指机械臂在运动过程中,由其末端的位移、速度和加速度确定的一系列点集组成的路径,而轨迹规划则是根据任务所需要的作业要求,在满足一定前提的情况下,计算出预期的运动轨迹。目前人们对于机器人末端轨迹规划的研究较为成熟,所有的机械臂的运动均需进行轨迹规划。丁磊研究了冗余机械臂在工业缝制过程中的应用[12],Panagiota Tsarouchia等人则研究了机械臂在汽车装配生产线上的运用,这些机械臂运动的前提都是进行轨迹规划[13]。目前对于机械臂的轨迹规划方法,最为人们所熟知的是在笛卡尔空间下,运用多次插补对运动轨迹进行分解计算,最后得到关节角得到机械臂的运动过程。刘海蓉便通过运用空间圆弧插补的方法消除机械臂运动过程中的拐角,消除奇异性[14]。齐志刚等人通过优化A* 路径规划算法,在臂形角空间和笛卡尔空间进行搜索,实现较好的避障功能[15]。Xucheng等人通过将机械臂末端轨迹转换为关节的空间运动轨迹,实现机械臂的末端轨迹规划[16]
1.3 本文主要研究内容
本文通过对中国探月项目岩石切割任务的研究,将任务划分为识别既定轨迹和对机械臂进行轨迹规划和控制两部分。将识别事先画在纸上的轨迹作为模拟月面上机器人识别插在需要进行切割的岩石上的小旗,识别到的轨迹即为所需进行切割作业的运动路径,对轨迹进行相应坐标点的提取,达到能为机械臂进行轨迹规划的目的。在需要相应的人为操控的情况下,将机器人自动识别轨迹进行切割转换为人通过键盘控制机械臂末端进行运动,以满足更为复杂的情况要求。
2 切割区域的识别与定位
根据前文调研情况,针对月面上的岩石切割区域识别与定位问题,将月面切割场景设定为在需要进行切割操作的岩石上插有指示旗,旗面上有需要从岩石上切割下来的平面图形,亦即机械臂末端所需运动的轨迹,当机器人从旗面上识别到末端需要运动的轨迹后,经过相应的平移来到达切割区域进行切割。此设定将满足机器人能够自动识别需要进行切割的区域并执行操作,自主程度高,适用于月面环境下机器人单机作业情况。
2.1 机器视觉识别
2.1.1 识别原理
机器视觉识别技术的原理与人眼对外部世界的感知有较大的相似性,人类对视神经传回的信息是先对形状、颜色、大小等有一个直观的认识,然后将经过大脑处理完成的信息进行存储,形成一个能够用于匹配的模板,当大脑再次受到相似的信息的刺激时,就会自动从已存储的信息中寻找匹配度最高的信息,这就是人类对图像的处理和识别。而机器视觉识别技术同样是将传感器获取到的图像信息进行存储,当再次获取到类似的事物时,cpu将获取的图像信息与已存储的信息进行匹配,进而完成识别过程,在机器视觉识别中,已存储的信息即为样本。
2.1.2识别过程
在任务中对图像信息的处理主要通过以下几个步骤完成。(1)图像信息的获取。任何操作都是以信息的获取为前提,在本任务中,对图像信息的获取通过baxter机器人左机械臂末端摄像头实现,通过控制机械臂末端所处位置,使其处于能完整获取到轨迹图形信息的位置,达到完成图像信息获取的目的。(2)图像的预处理。通过摄像头获取到的图像信息包含许多的干扰,如阴影、背景等环境因素的影响,这些干扰称为“噪声”,本任务中对图像信息的识别是基于相应的特征匹配而进行,通过将识别到的轮廓信息与样本库进行对比,匹配出最相似的样本,因此噪声的存在将影响识别结果的准确率,基于此,在获取图像信息之后,先对其进行预处理,将噪声通过滤波等手段尽量排除,增大图像的特征值,降低计算机运算负荷的同时提高保证提取的图像的可靠性。(3)图像信息特征选取。在传感器获取的图像信息中,并不只是单一的特征,如在一个图像中,可能有一个方形的盒子,一个圆柱形的水杯等,只有根据具体的任务,将所需要的特征进行识别,才会得到我们期望的结果。所以在图像特征的选取过程中,我们需要设计特定的程序来进行特征的选取,这是识别准确与否的关键步骤。(4)特征的分类。在将图像特征进行提取之后,我们需要对其进行分类,不然在进行匹配的过程中,信息的数据量将极其庞大,给cpu造成巨大的负荷,降低识别的速度。因此,我们需要给特定信息设定具体的识别规则,使其能够从大到小逐层匹配,不必对所有信息进行遍历。
2.2切割区域的识别
在本设计中,将所需识别的轨迹用黑色线条置于白色的背景中,将需要采集的形状设定为圆、矩形、三角形和直线四种,考虑到所需识别的内容具有较为明显的边界特征,因此,本论文将采用基于边界跟踪的数字化二值图像分析对特征进行提取。
2.2.1 数字化二值图像
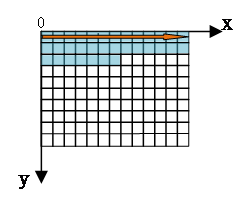
图像是由像素点组成的,将图像的像素点进行排序,规定其行序号从左到右逐渐增大,列序号从上到下逐渐增大,将坐标原点设定在图像左上角,横轴为X轴,纵轴为Y轴,每一个像素点就可以用一个确定的坐标位置来决定,图像就可以用一个矩阵来表示,如图2.1所示。
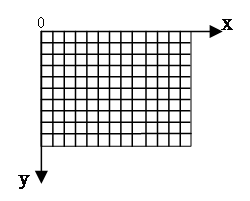
图2.1 图像坐标系表示
像素点的颜色由RGB值决定,每一个像素点对应一个RGB值,该值的范围为0~255,因此,我们可以通过设定一个用于分界的值,假定为a,当像素点上的RGB值在 之间时,此像素点RGB重置为0,当像素点上的RGB值在
之间时,此像素点RGB重置为0,当像素点上的RGB值在 之间时,此像素点RGB重置为255,此过程称为图像二值化,也称为降噪,得到的图像即为灰度图。
之间时,此像素点RGB重置为255,此过程称为图像二值化,也称为降噪,得到的图像即为灰度图。
在本任务中,图像二值化的完成通过开源计算机视觉库opencv中的函数threshod完成,threshod函数中包含五个参数,分别是输入图像、输出图像、阈值、阈值最大值和处理图像的具体使用方法,在本任务中,所需识别的轮廓由线条组成,为了让线条更为明显,采用的处理图像方法为THRESH_BINARY,在函数中代号为8,将阈值设为100。同时,由于摄像头四周容易受到摄像头组件的物理影响,产生大量难以处理的噪点,因此将经过降噪处理的图像通过黑白转换,生成轮廓为白色,背景为黑色的图像,实际生成图像如图2.2所示。
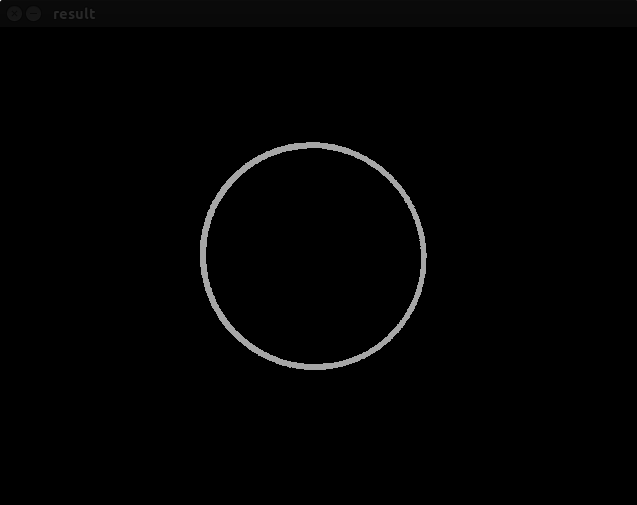
图2.2 数字化二值图像
2.2.2 边界跟踪
对图像预处理完成后,将进行图形轮廓的寻找。在数字化二值图像的处理中,边界跟踪是一种基础且成熟的技术。他通过提取二值图像中边界轮廓的一系列坐标点来达到识别轮廓的目的。这个边界轮廓指的是像素点RGB值为255的连通域和值为0的连通域之间的边界,而值为0的连通域将其称为背景或孔洞。图像的上下左右四个边界组成了一幅图像的边框(frame),假设得到的二值图像边框为0像素,如果一个像素值为0的连通域S1包含图像边框,那么就称S1为背景,否则为孔洞[17]。
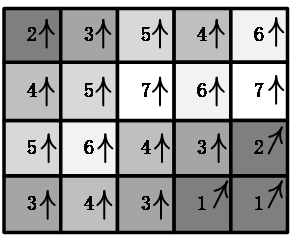
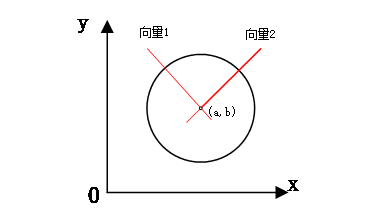
在对图像信息进行处理时,通过对图像的像素点按照先行递增再列递增的循环方式进行遍历,如图2.3所示,当值为255的连通域内的像素点a(i,j)在它的邻域的8个像素点内存在值为0的像素点b(p,q),那么就称(i,j)为一个边界点,如图2.4。若在遍历过程中遇到一个边界点(m,n),此点则是外边界或孔边界。将所有遍历得到的边界点坐标值进行拟合,得到具有一定特征的边界曲线。
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: