MQ2538港口装卸四连杆门座式起重机变幅机构CADCAE毕业论文
2020-02-19 19:25:52
摘 要
近年来,随着全球化的发展,港口在运输的大板块上越来越重要,我国国力越来越强,进出口贸易量越来越大,国际物流日益强大。一带一路的蓬勃发展,使港口日益繁华,而起重机等各类装卸设备是港口的主体支承,门机在众多起重机中又是主力军,地位极其重要。变幅机构是门座式起重机是主要的机构之一,它的稳定运行对门机意义重大。因此,对变幅机构的设计是极其重要的。
本文以MQ2538门座式起重机为例子,根据设计参数及其要求,完成金属结构的型式选择;进行整机总体布置;估算各部分重量重心位置和迎风面积;进行轮压计算以及整机抗倾覆性的校核。完成了运行机构方案的选择及稳态运行阻力的计算,电动机的选择,减速器的选择,制动器的选择。最后完成所设计的运行机构的建模以及仿真。
关键词:门座式起重机;变幅机构;机构设计
Abstract
In recent years, with the development of globalization, the ports in the transport of large plate more and more important, China is more and more strong, import and export trade is more and more big, the vigorous development of the international logistics growing area all the way, the port is becoming more and more prosperous, and cranes and other kinds of port handling equipment is the main bearing, door crane is main force, in numerous crane luffing mechanism of extremely important position is the portal crane is one of the major institutions, its stable running across the hall crane is of great significance, therefore, the design of luffer is extremely important.
In this paper, MQ2538 gantry crane as an example, according to the design parameters and requirements, to complete the type selection of metal structure; Overall arrangement of the whole machine; Estimating gravity center position and windward area of each part; Carry out wheel pressure calculation and check the anti-overturning performance of the whole machine. Complete the selection of running mechanism scheme, calculation of steady-state running resistance, selection of motor, reducer and brake. Finally complete the modeling and simulation of the designed running mechanism.
Key Words : portal crane; luffing mechanism;mechanism design.
目 录
第1章 绪论 1
1.1 课题的目的和意义 1
1.1.1 背景 1
1.1.2 国内研究现状 1
1.1.3 目的和意义 2
第二章 总体设计 3
2.1 门机主要结构 3
2.1.1 主要设计参数 4
2.2 货物水平位移补偿系统设计 5
2.3 杠杆-活对重法臂架自重平衡系统设计 6
2.3.1 臂架自重平衡系统设计方法 7
2.3.2 臂架平衡系统的验证 7
2.4 风载荷 9
2.5 整机抗倾覆稳定性校验 10
2.5.1 门座式起重机验算的工况 10
2.5.2 倾覆线的确定 10
2.5.3 倾覆力矩的计算载荷 10
2.5.4 门座式起重机的抗倾覆稳定性校验计算 12
2.6 轮压 14
第三章 变幅机构 18
3.1 变幅驱动设置的计算 18
3.1.3 风阻力PWⅠ 23
3.1.4 稳态运行阻力 24
3.2 选择电动机 24
3.2.1 计算电动机功率 24
3.2.2 初选电动机 24
3.2.3 电动机的校验 24
3.3 选择减速器 27
3.3.1 计算传动比 27
3.3.2 计算减速器的输入功率 27
3.3.3 选取减速器 27
3.4 选择制动器 28
3.4.1 计算制动转矩 28
3.4.3 选取制动器 29
3.5 选择联轴器 29
第四章 三维建模与仿真 31
4.1 三维建模 31
4.1.1 创建零件 31
4.1.2 建立装配体 33
4.2 Adams仿真 33
第五章 环境影响及经济性分析 36
第六章 总结与展望 37
6.1 全文总结 37
6.2 展望 37
参考文献 39
第1章 绪论
1.1 课题的目的和意义
1.1.1 背景
门座起重机是我国最早、最具代表性的回转轨道起重机。在门机的结构设计中,变幅机构的设计是基本的组成部分之一。设计质量直接影响整个门座起重机的经济性、可靠性。
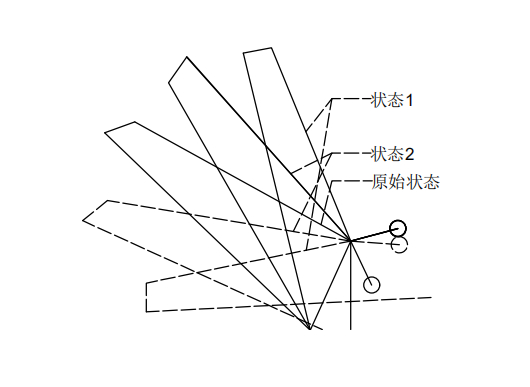
变幅系统是门机至关重要的一部分。通常说,变幅系统的选择决定了整个门机的基本形式。变幅系统的优化和弊端也对整个门机产生决定性的影响。门座起重机变幅系统种类,品质繁多,其中平面四连杆机构是最常用的一种。在门机从最大幅度变为最小幅度过程中,要求象鼻梁端点的位移轨迹近似为一条直线。然而,由于其复杂的设计变量和许多约束条件(一般来说,约束性越多,设计空间中的位置越不连续,岛屿区域越孤立),会导致优化应用和研究更加困难。
1.1.2国内研究现状
目前,我国门座起重机的发展面临以下问题:第一,主要依靠进口发动机液压元件等核心元件的核心元件技术水平存在很大不足,严重制约了起重机行业的发展,增加了设备的生产成本,这不仅是门座起重机面临的问题,也是中国机械行业面临的挑战[3]。因此,我们需要更多的高端人才来采取有效的措施和更先进的思路来改善如今国内的起重机现状,提高整体的设计精度和设计质量。第二,是制造的技术尚有差异。虽然国内现已有设计师提出了更好的设计理念和思路,但国内机械重工方面的制造工艺有些尚未达到世界的超一流水准,部分设计无法实现,更多的是细节方面,大致处于世界水平。再关注制造方面,不只是操作工人的技术不能达到全员操作高精度仪器,同样,国内现在无法实现高精度设备的普及,对高智能化,全自动化,无人化的设备的研发不足,数量欠缺。在门机的整个设计过程中,我们不能单纯从产品的要求出发,反而缺少了设计要求。我们不仅要关注产品的安全,同样我们要确保低风险和易操作。因此,我们仍需向国际最前沿的科研技术看齐,不断发展完善自己的科技能力,对他国的先进技术吸收采纳,取其精华,去其糟粕,在基础上实现再创新。
1.1.3 目的和意义
在港口的大家庭中,门机全面运用于无论是码头还是造船厂等各类相关领域,是现代港口必要的部分变幅机构在门机中是至关重要的一个部分,是设计的绝对偏向点。如何实现机构的最小能耗是关键,变幅机构的优化设计思想集杆系优化、截面优化和动力学分析于一体,旨在降低门座起重机的制造和运行成本,提高经济效益[5]。
1.2 毕业设计主要内容
1. 确定MQ2538港口装卸四连杆门座式起重机总体结构型式及主尺寸,完成货物水平位移补偿系统及臂架自重平衡系统的设计,完成总体设计计算;
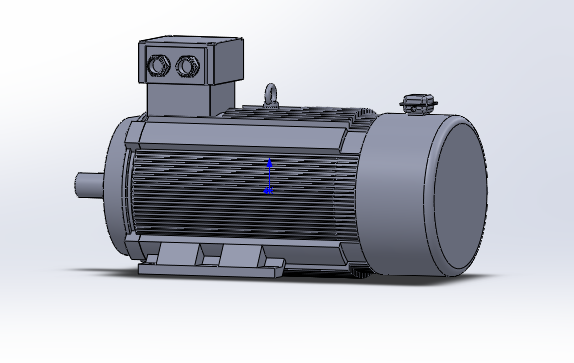
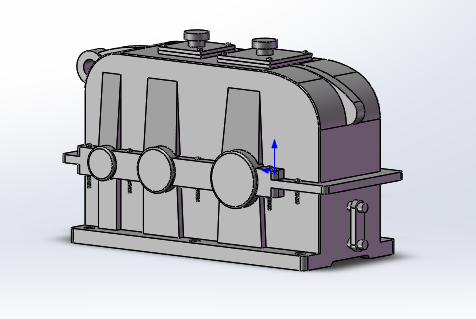
2. 确定变幅机构型式,完成驱动功率计算,完成变幅机构驱动电动机、减速器、联轴器、制动器等的选型计算;
3. 完成变幅机构的施工设计及三维仿真建模;
4. 利用ADAMS软件完成变幅机构的运动学或动力学仿真;
第二章 总体设计
本章内容为:介绍了MQ2538门座起重机的总体设计。主要内容是确定整个机器的总尺寸;完成水平位移补偿系统完成臂架自重平衡系统计算;计算自重载荷和风载荷。在这个基础上完成了支撑反力与轮压的计算,完成整个系统的稳定性测试。
2.1门机主要结构
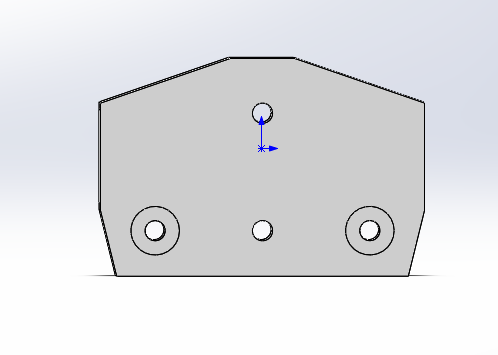
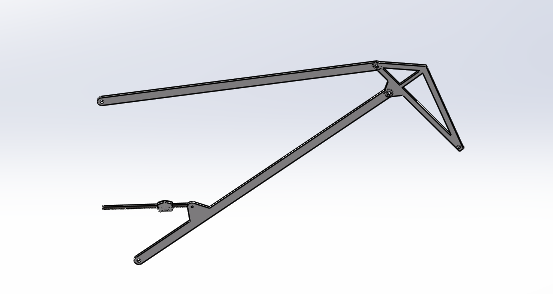
门座起重机主要包括升降机构、操作机构、变幅机构、回转机构、臂架系统、人字架、圆筒门座机构、人字架等部件。臂架结构如图2-1所示。
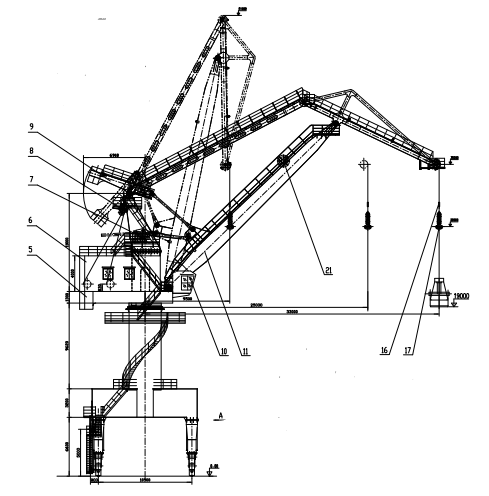 图2-1 MQ2538港口装卸四连杆门座式起重机
图2-1 MQ2538港口装卸四连杆门座式起重机
2.1.1 主要设计参数
MQ2538主要性能参数表 | |||
起重量 | 25t | ||
工作幅度 | 最大/最小 | 38m/14m | |
起升高度 | 轨上/轨下 | 30m/18m | |
机构 | 起升机构 | M8 | 40m/min |
变幅机构 | M7 | 55m/min | |
回转机构 | M7 | 1.5r/min | |
运行机构 | M4 | 30m/min | |
风速 | 工作最大风速 | 20m/s | |
非工作最大风速 | 55m/s | ||
基距/轨距 | 12m/12m | ||
工作时最大轮压 | 250KN | ||
最大尾部回转半径 | 10m | ||
轨道型号 | QU80 | ||
图2-2 主要性能参数表
本论文的其他尺寸还有:臂架最大幅度仰角44°,臂架最小幅度仰角76°,臂架尺寸长度为35.143m,大拉杆尺寸长度为30.462m,象鼻梁前臂尺寸长10.764m,象鼻梁后臂尺寸长3.960m。
2.2 货物水平位移补偿
门座起重机的变幅机构在变幅过程中不能使货物保持在同一水平。如果货物在变幅过程中波动较大,变幅驱动机构的能耗会增加,驾驶员的操作难度也会增加。因此,须采取必要的措施来进行水平位移补偿。
在实际的计算中,我们可以讲一系列数据输入Maple软件输入相应程序,寻找最优解,利用好Maple计算软件可以省去我们很多人工计算步骤,而且可以满足我们对臂架系统的要求。
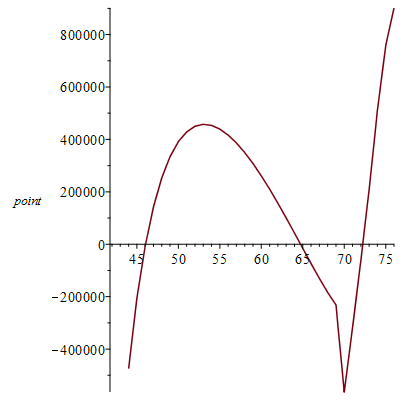
我们依次选取 =42°,44°…75°取34个坐标点。
=42°,44°…75°取34个坐标点。
[10.00000001, 17.89716943], [11.28568594, 17.87780355], [12.49344686, 17.87619266], [13.63786013, 17.88555983], [14.72924090, 17.90138921], [15.77520832, 17.92055747], [16.78157726, 17.94084999], [17.75289965, 17.96067303], [18.69281234, 17.97887356], [19.60426872, 17.99462171], [20.48969991, 18.00733182], [21.35112879, 18.01660786], [22.19025409, 18.02220522], [23.00851233, 18.02400360], [23.80712510, 18.02198764], [24.58713564, 18.01623345], [25.34943673, 18.00689931], [26.09479328, 17.99422015], [26.82385935, 17.97850445], [27.53719229, 17.96013406], [28.23526313, 17.93956632], [28.91846486, 17.91733855], [29.58711831, 17.89407545], [30.24147588, 17.87049927], [30.88172339, 17.84744417], [31.50797941, 17.82587497], [32.12029249, 17.80691241], [32.71863471, 17.79186661], [33.30289185, 17.78228247], [33.87284724, 17.78000145], [34.42815821, 17.78724794], [34.96831974, 17.80675241], [35.49260935, 17.84193258],根据数据绘制曲线。如图2-3所示。
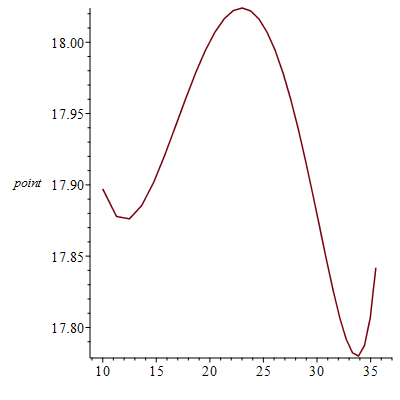
图2-3 数据曲线
最高点:
最低点:
最大上下高度差:
校验:
校验通过,满足要求。
2.3 杠杆-活对重法臂架自重平衡系统设计
设计目标:计算杠杆以及连杆的尺寸及活对重。
原则:活对重对臂架下铰点的力矩和臂架自重对下铰点的力矩尽量等大反向,使系统整体重心在变幅过程中沿近似水平线移动。
2.3.1 臂架自重平衡系统设计方法
第一步,由设计要求可知,给杠杆支点定位和确定活配重转动的半径。另须特别关注尾部的可运行半径,以减少活配重重量,增加总工艺性以及整体稳定性。第二步,由臂架设计要求可知,确定连接点A的位置关系(小拉杆与臂架结构),第三步,通过拉拔法求解。检验计算结果。
2.3.2 臂架平衡系统的验证
在初步确定平衡系统的杠杆尺寸和活配重重量后,有必要检查其平衡状况,如果不符合要求,有必要采用相同的方法进行校正。
具体验算方法如下:
在整个幅度内,以每一度增加一个节点,确定33次臂架位置,并利用Maple软件绘制未平衡力矩△M的曲线。
 (2-1)
(2-1)
式中: -臂架系统自重对臂架下铰点的力矩;
-臂架系统自重对臂架下铰点的力矩;
 -活对重引起的对臂架下铰点的力矩。
-活对重引起的对臂架下铰点的力矩。
检验未平衡力矩△M应满足下面条件:
①最大幅度时:  且
且  <0;
<0;
最小幅度时:  且
且  >0.
>0.
其中, 是因
是因 对臂架下铰点的力矩。
对臂架下铰点的力矩。
②
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: