一种基于蠕动的压电驱动旋转执行器外文翻译资料
2021-12-20 21:58:31
英语原文共 8 页
一种基于蠕动的压电驱动旋转执行器
译者:朱禹弛
摘要
本文介绍了一种压电驱动的步进旋转驱动器。利用9个压电堆和柔性铰链,设计的驱动器可以实现大范围、高精度的旋转速度。介绍和计算了构成执行器的三种工作单元:夹持转子的夹紧单元、压电堆预载调节单元和产生驱动力矩的驱动单元。为了测试其工作性能,研制了一台样机驱动器,实验结果表明,驱动电压20V,频率1Hz时,最小步进角为4.95rad,驱动电压100V时,最大输出扭矩为93.1N mm,频率6508.5rad/s时,最大速度为6508.5rad/s。达到30赫兹。实验结果表明,在不同的驱动电压和频率下,该驱动器可以实现不同的步进角和转速,具有较高的精度。
关键词:压电驱动器 尺蠖 屈曲 铰链旋转式定位系统
1.引言:随着科学技术的发展,精密定位系统在精密与超精密制造、纳米技术、半导体、微机电系统等领域越来越重要。到目前为止,已经开发出许多新型执行机构,其中压电驱动执行机构就是其中之一[1]。压电驱动器具有体积小、分辨率高、响应快、能耗低等优点,适用于精密定位系统。到目前为止,压电驱动执行机构主要分为超声波执行机构[2-5]、惯性步进执行机构[6-11]、蠕动执行机构[12-17]等。超声波激励器是基于压电振动体实现的椭圆运动,在摩擦作用下激励器可以达到高速运动,但输出力和高分辨率运动仍然是其难点。惯性步进执行器通常只由一个有源元件组成,因此易于控制,响应速度快。蠕动执行器的运动范围大,输出力矩大,近年来受到了广泛的关注。
但是到目前为止,大多数的蠕动执行机构都是线性执行机构[12–16],仅提供了一些使用蠕动原理的旋转执行机构[17–20]。其中一些具有有限的范围[19],其他的在输出扭矩方面有困难[17,18]。本文提出了一种基于蠕动原理的压电驱动旋转执行器,实现了旋转运动。利用9个压电堆和柔性铰链,设计的执行机构可以实现高精度的步进旋转运动。柔性铰链的设计是为了实现所需的力,也可以减少部件的数量和装配的努力。实验结果表明,该驱动器具有较大的运动范围和较高的位置精度。这种新型驱动器对将蠕动原理和柔性铰链应用于压电驱动驱动器的设计具有一定的参考意义。
2.结构分析
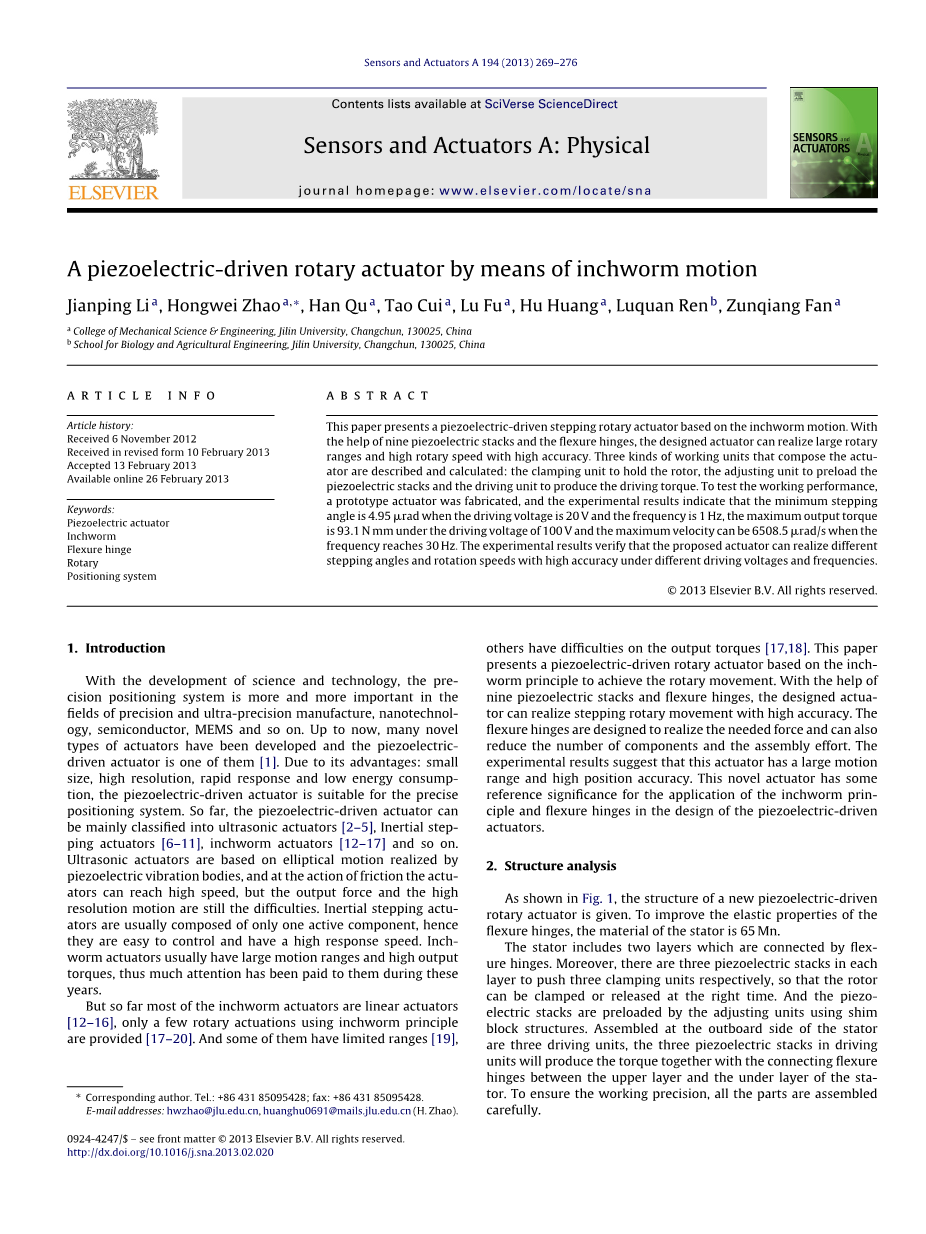
如图1所示,给出了一种新型压电驱动旋转执行器的结构。为了提高柔性铰链的弹性性能,定子材料为65Mn。
定子由两层柔性铰链连接而成。另外,每层有三个压电堆,分别推动三个夹紧单元,使转子在正确的时间被夹紧或释放。压电堆采用垫块结构,由调节单元预加载。安装在定子外侧的是三个驱动单元,驱动单元中的三个压电堆将产生扭矩,以及在定子上层和下层之间的连接弯曲铰链定子。为了保证工作精度,所有零件都要仔细装配
图1设计的旋转执行机构的型号
2.1夹紧装置
如图2所示,为了实现足够的夹紧力,执行机构每层使用三个夹紧单元,因此总共有六个夹紧单元。夹紧装置对执行机构的性能取决于每层夹紧装置是否能在适当的时间将转子紧紧地固定住具有重要意义。当夹紧压电堆充电时,它们将花费以推动夹紧柔性铰链。在柔性铰链的作用下,夹钳可以紧紧地夹住转子。该结构采用三个相距120_的夹紧单元,其优点是输出力大,且具有自对中特性。夹紧装置工作时采用摩擦原理。图3显示了转子顺时针旋转时的受力情况。
如果转子夹紧,必须满足以下方程,并可得到输出扭矩:
M = 3f0R minus; M0 minus; Me ge; 0 (1)
f0 =micro; F (2)
式中m为执行机构输出力矩(N·m);f0为转子与夹钳之间的摩擦力;f为转子与夹钳之间的摩擦系数;f为各夹紧装置提供的保持转子的力(N);m0为转子的惯性矩(N·m);me为外载荷矩(N·m)。
图2夹紧装置工作原理图 图3转子受力情况
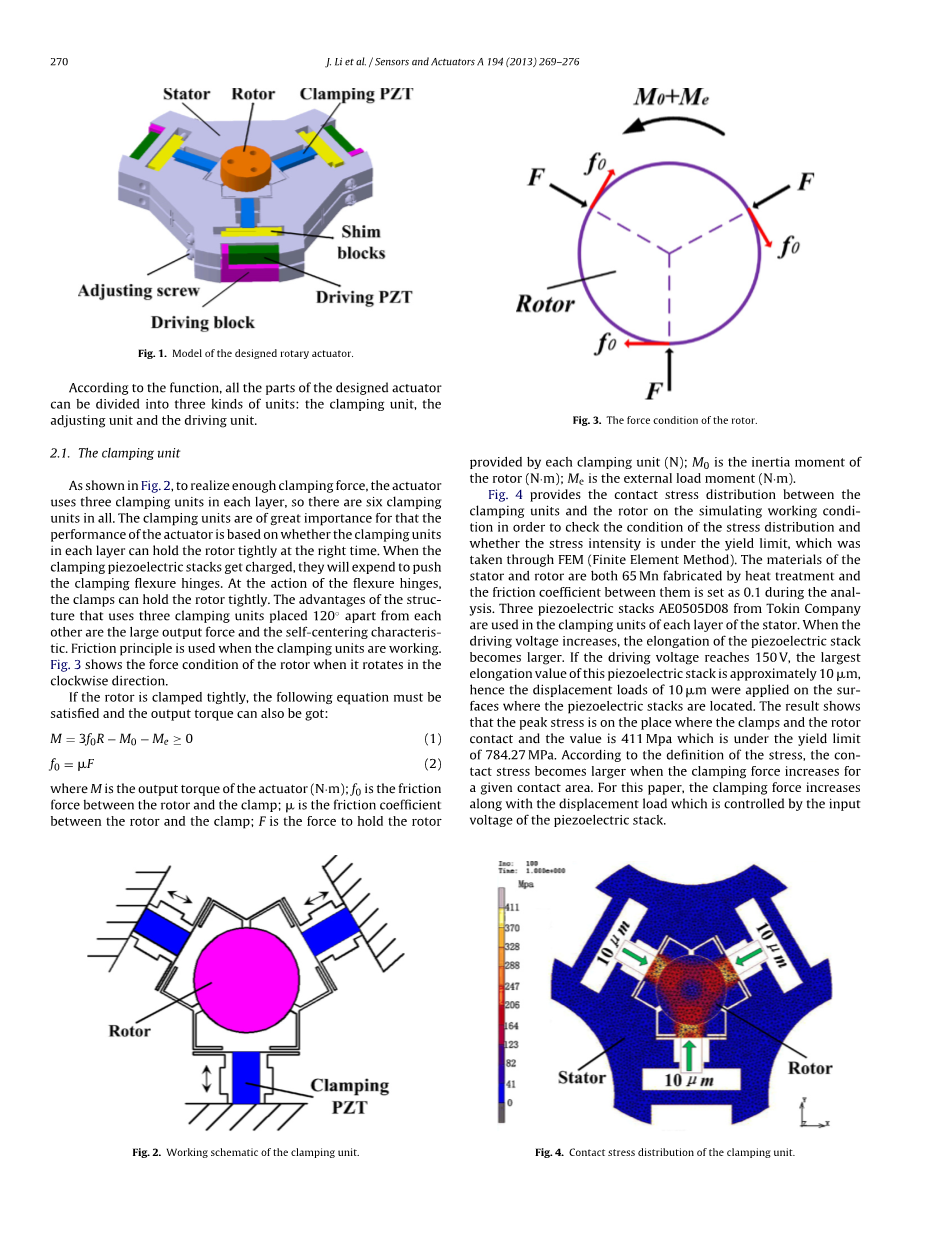
图4提供了模拟工作条件下夹紧装置和转子之间的接触应力分布,以检查应力分布情况以及应力强度是否在屈服极限下,这是通过有限元法(FEM)得出的。定子和转子材料均采用热处理法制备65Mn,分析时将其摩擦系数设为0.1。在每层定子的夹紧装置中使用三个来自东京公司的压电堆AE0505D08。当驱动电压增大时,压电堆的延伸率增大。如果驱动电压达到150 V,压电堆的最大延伸值约为10 m,因此在压电堆所在的表面上施加10 m的位移荷载。结果表明,最大应力出现在夹具与转子接触处,其值为411兆帕,在784.27兆帕屈服极限以下。根据应力的定义,在给定的接触面积内,夹紧力增大,接触应力增大。在压电堆输入电压的控制下,夹紧力随位移载荷的增大而增大。
图4夹紧装置的接触应力分布
图5调节器工作原理
2.2调节装置
使用调节装置的目的是预加载压电堆,使其能够实现设计的足够的力和位移。本文采用垫块结构调整装置,调整方便,调整精度高。
图5显示了垫块结构的工作原理,从而可以得到工作方向上的位移变化:
Delta;Z=Delta;Ytimes;tanalpha;(3)
式中Z为Z(m)工作方向的位移变化量;Y为Y(m)方向的位移变化量;为垫块倾角()。
因为的值非常小,所以公式(3)可以改为以下公式:
Delta;Z=Delta;Ytimes;alpha;(4)
其中单位改为“rad”。
这里的值为2,因此工作方向z的变化比y的变化小,因此垫块结构可以调整压电堆的预载
高精度。
2.3驱动装置
驱动单元的作用是提供驱动力来实现旋转运动。良好的驱动装置应能提供高精度的大输出力。本文中,一种新型的驱动结构如图6所示。驱动块的形状与旋转放置的字母“L”相似。其下侧通过过盈配合装配在定子下层,但驱动块的上侧不与定子上层接触,驱动压电堆装配在驱动块上侧与定子上层之间,如图6所示。因此,当驱动压电堆膨胀时,定子的上层在它们之间连接的弯曲铰链的作用下相对于下层转动一个角度,弯曲铰链起扭转弹簧的作用。当驱动压电堆失电时,上层将回到原来的位置。
图6驱动装置的结构
图7所示为驱动单元工作时定子的静应力分布。驱动装置中使用了托金公司的三个压电堆AE0505D16。当驱动电压达到100 V时,该压电堆的延伸率约为10 m,因此在驱动压电堆所在的表面上施加10 m的位移荷载(见图6)。理论上,转子将转动一个角度:
(5)
式中为Delta;theta;转子一个工作圆的步进角(rad);Delta;L为弧长(rad);R为转子轴线与驱动压电堆之间的距离(m)。
一个工作循环中弧长Delta;L的计算示意图如图8所示。Delta;L0是点A和点Arsquo;之间的距离。弧长可实现如下:
(6)
(7)
图8一个工作周期弧长的计算示意图
从公式(6)和(7),可以得到如下方程: (8)
这里Delta;L0是如上所述的10 m压电堆的延伸率;R是转子轴与驱动压电堆之间的距离,为80 m m。因此,由式(8)得到的L值为10.0000000065 m,Delta;L和Delta;L0之间的差值很小,弧长很难测量,因此驱动单元中的驱动压电堆的延伸率被用来代替它。
如果执行机构持续工作,总旋转角度将如下:
(9)
其中,theta;是连续工作圆后的总角度;Delta;theta;i是圆处的角度;n是工作圆的个数。
此外,对于给定的频率f,角速度V可以得到: (10)
三.运动原理
图9显示了设计执行器中压电堆的输入信号。v1为上层夹持压电堆的输入电压,v2为下层夹持压电堆的输入电压,ve为驱动单元压电堆的输入电压。执行器工作时,所有输入电压必须严格按顺序给出。如图9所示,每一个工作循环可进一步平均分为六个子步骤。工作原理如图9和图10所示。
图9压电堆的输入信号
图10一个工作圈的工作过程
第一步:在t1、V1和V2电压较高的时候,上下两层的压电叠片将展开以推动夹紧柔性铰链,使转子紧紧夹紧,如图10(a)所示。
第二步:在t2期间,输入电压v2处于低压,但v1仍处于高压。因此,下层的夹紧挠曲铰链将被松开,但上层的夹紧挠曲铰链仍夹紧转子(见图10(b))。
第三步:当时间到t3时,ve变为高压,因此驱动单元中的压电堆充电,它们将推动上层。由于上层与下层之间采用柔性铰链连接,柔性铰链起扭转弹簧的作用,下层固定在基层上,因此上层相对于下层会发生角度变化。同时,v1仍处于高压状态,转子仍被上层夹持,转子也将转动一个角度(见图10(c))。
第四步:在t4时间内,底层的夹紧装置也将固定转子,因为V2处于高压状态。
第五步:在t5、v1处于低压状态时,上层的夹紧装置会使转子松动。
第六步:在时间t6时,V2仍处于高压状态,但ve变为低压,在上下层之间连接的柔性铰链的作用下,作为扭转弹簧,上层将回到原来的位置。
六个子步骤完成后,完成一个工作循环,转子将转动一个角度,公式(5)给出了理论步进角。重复此操作,可以实现大角度。当ve改变为不同的值时,步进角也会改变。如果交换输入信号v1和v2,转子将反向旋转。工作原理是蠕动原理在新型压电驱动旋转执行器中的应用。已经做了一些工作来验证这一原则的可行性。
四.详细的实验原型和测试
图11显示了设计的压电驱动的原型测试所设计的压电驱动装置的性能执行机构。如图所示,定子直径为80毫米,厚度为13mm。转子尺寸为˚20 mmtimes;25 mm。为了获得良好的柔性铰链的弹性性能,定子在线放电加工前经过锻造、热处理、铣削和磨削加工。执行器的所有部件都仔细组装在了一起。
为了测试所设计的压电驱动旋转执行器的性能,进行了实验研究。
图11.执行机构设计原型
4.1.实验系统
图12给出了本文建立的实验系统,该系统主要由电源、信号控制器、信号放大器、信号处理器、样机和激光传感器组成。驱动装置采用托金公司的三个压电堆AE0505D16,夹紧装置采用其他六个压电堆AE0505D08。系统工作时,信号控制器产生控制信号(如图9所示),然后由PI公司的信号放大器放大输入信号驱动样机。同时,来自keyence公司的分辨率为10纳米的激光传感器LK-G10将测量激光头与反射镜之间的距离。最后,信号处理器将收集并处理所有的日期。所有实验设备均固定在隔振光学台上,在25℃下进行实验。
图12所建立的实验系统(a)由实验系统的主要部分组成,(b)是图12(a)的局部放大图,详细显示了转子类型和试验过程
4.2性能
图13显示了步进图11的工作性能。设计的执行机构原型。在不同驱动电压(ve)和给定频率f下的运动为1Hz,夹紧电压v1和v2均为100V,当驱动频率较低时,其对步进运动的影响不显著,这里选择给定频率为1Hz,因为它易于控制和观察。由此可见,驱动电压对输出步进角有显著影响。这种工作形式是由第3节中介绍的蠕动原理造成的。驱动电压(ve)的最小值为20 V,当驱动电压低于20 V时,执行器将不旋转。
从理论上讲,转子的旋转范围是无限的。从图13和式(5)可以得到实际的步进角,但这里Delta;L应变为图13所示的一步位移;R应变为反射镜上的测量点与转子轴之间的距离,本文中的距离为20 mm。图14给出了在1赫兹固定频率和100伏固定钳位电压下,步进角(Delta;theta;)和驱动电压(ve)之间的关系。步进角(Delta;theta;)随驱动电压(ve)的增大而增大。这与本文所用的压电堆的性能一致:压电堆的延伸率随输入电压的增加而增大。当驱动电压为100V时,最大步进角为216.7rad,在20V驱动电压下最小步进角为4.95rad。
如果交换输入电压v1和v2,转子将反向旋转(见第3节)。图15给出了所设计的执行机构在正负方向上的工作特性:向上20步,向下20步。它们的高度差为0.76m,如图15所示,根据式(5),20步后的位置精度为38rad,因此步进精度为1.9rad。
速度是执行器的基本特性之一。本文根据式(10)求出角速度。在恒定驱动电压为100V的情况下,速度与工作频率之间的关系已经得到并在图16中说明。执行机构的最大工作频率为40赫兹。从图16可以看出,当频率从0.1赫兹到30赫兹变化时,所设计的执行机构的速度将不断增加。然而,当频率高于30赫兹时,速度会降低。这可能是由于时间太短,压电堆无法扩展到理论长度。因此,步进角小于低频时的步进角,从而导致工作速度降低。
图13不同驱动电压下的工作性能 图14步进角与驱动电压的关系(v1=v2=100V,f=1Hz)
图15正、负方向累计位置精度 图16不同驱动频率下的速度特性
为了测试输出扭矩,在转子上放置一个测试杆,用铜线牵引重量,力臂为95mm。输出扭矩测试系统的工作原理如图所示。图17和图18给出了输出转矩实验的测试结果,得到了给定驱动电压为100V,频率为1Hz时,步进角(Delta;theta;)与输出转矩之间的关系。图中显示,当输出扭矩增大时,步进角(Delta;theta;)减小。当重量大于100g时,所设计的执行机构不能平稳工作。因此,设计的执行机构的最大输出扭矩约为93.1 N mm。
图17输出扭矩测试系统工作原理图 图18不同输出扭矩下的步进角
5.结论
本文提出了一种利用微进给运动的压电驱动旋转驱动器。对其结构和工作原理进行了详细的阐述。并对其
资料编号:[4210]



