基于D-H法的多关节串联机器人机构设计及其运动学分析开题报告
2020-02-20 09:36:57
1. 研究目的与意义(文献综述)
一、目的及意义1.研究目的
在新一轮技术革命和产业变革的时代背景下,全球各主要经济主体积极围绕以工业机器人为主的智能制造业展开激烈竞争。可以预期,工业机器人将为
我国全面提升社会生产力提供支持,并为我国加快经济转型、建成创新型国家做出重要贡献。
在新一轮技术革命和产业变革的时代背景下,全球各主要经济体积极围绕以工业机器人为主的智能制造业展开激烈竞争。顺应趋势,国家相关部门陆续
颁布《机器人产业发展规划 (2016-2020年 )》,《智能制造发展规划 (2016-2020年 )》,《新一代人工智能发展规划》等文件,这使推动工业机器人产业的发展得以上升为国家战略。可以预期,工业机器人将为我国全面提升社会生产力提供支持,并为我国加快经济转型、建成创新型国家做出重要贡献,因此,机器人的发展也将成为提升我国实力的重中之重。
随着社会的迅速发展,生活质量的提高,人工劳动力越来越难以满足高效的生产生活方式,机器人以其智能、高效、安全等优点逐渐被应用于我们的生产生活当中,如:物流的包装分拣、采集组装、喷涂焊接等。而机器人的运动学分析和轨迹规划是机器人技术的核心内容之一,该方面的研究与实现对机械手后续动力学的研究、执行器的选择以及控制策略的确定密不可分。通过仿真手段模拟分析机器人的性能,可以预知实体操作发生的不安全因素,从而减少不必要的资源浪费和损失,及时了解机器人的动态性能。
2.研究背景与现状
国内的工业机器人产业起步于上世纪70 年代,大致可分为以下几个阶段:第一阶段是 1970 年~ 1985 年的“萌芽期”, 此阶段主要侧重于工业机器人的理论研究;第二阶段是 1986 年~ 1990 年的“技术研发期”,此阶段政府加大了对工业机器人研究的支持力度,并制定出详细的工业机器人技术攻关计划;第三阶段是 1991 年~ 2000 年的“原型开发期”,此阶段国内对焊接机器人、计算机数控机床等相关技术和设备进行了优先开发,并以此奠定了国产机器人商品化和工业化推广的基础。同时,一些工业机器人制造商也在市场中崭露头角,如:新松机器人、北京机械工业自动化所及广州数控等。第四阶段是 2001年~ 2010 年的“初步工业化期”,此阶段国内首次对工业机器人进行了规模化使用,重点包括深海载人、高精切割、危险作业、反恐军械等领域。第五阶段是 2011 年~现在的“快速发展期”,此阶段工业机器人的采购、生产和应用开始激增。2013 年,中国超越日本成为全球最大的工业机器人市场;2016 年,中国工业机器人企业的数量达到 1500 家,仅广东省就超过了 280 家;2017 年,中国工业机器人的销售数量接近 10 万台,占全球工业机器人市场的 1/3。不仅如此,长三角、珠三角、环渤海和中西部地区还分别形成了各自具有代表性的工业机器人产业聚集区域。
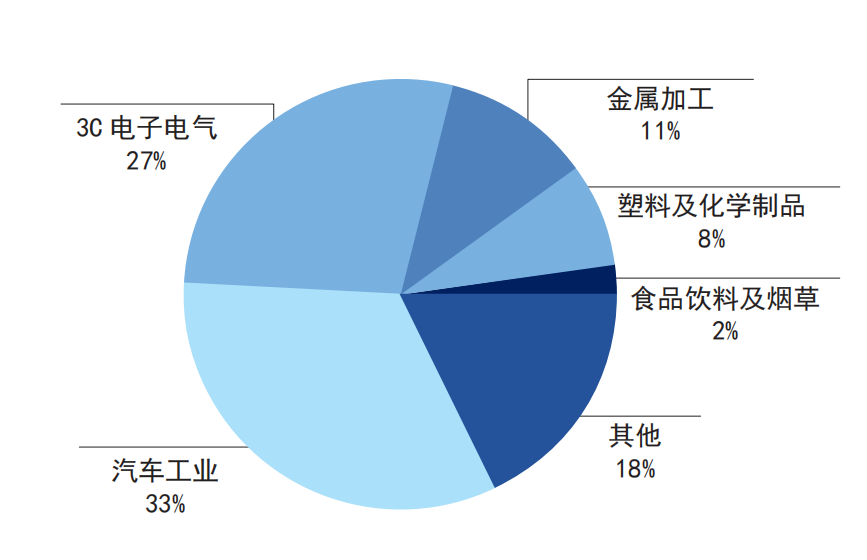
得益于产业政策的激励和市场需求的带动,近年来我国工业机器人的产量快速增长。根据《中国工业机器人行业市场深度评估及投资前景评估报告》,在 2012 年,我国工业机器人的产量仅为5763 套;到 2013 年,就已达到 9548 套;再到 2014 年,已为 12050 套。三年来,增长了 109%。此后,我国工业机器人的产量增长更加强劲:2015 年为 32996 套,2016 年为 72426 套,2017 年为 131079套。从这些工业机器人的应用领域来看,国内的工业机器人主要分布于汽车行业、3c 电子电气行业、金属加工行业、塑料及化学制品行业、食品饮料及烟草行业等。其中,汽车行业的占比最高,约为33.25%;其次是 3c 电子电气行业,约为 27.65%;第三是金属加工行业,约为 10.76%;第四是塑料及化学制品行业,约为 7.85%;第五是食品饮料及烟草行业,约为 2.27%。其余行业,占比18.22%。
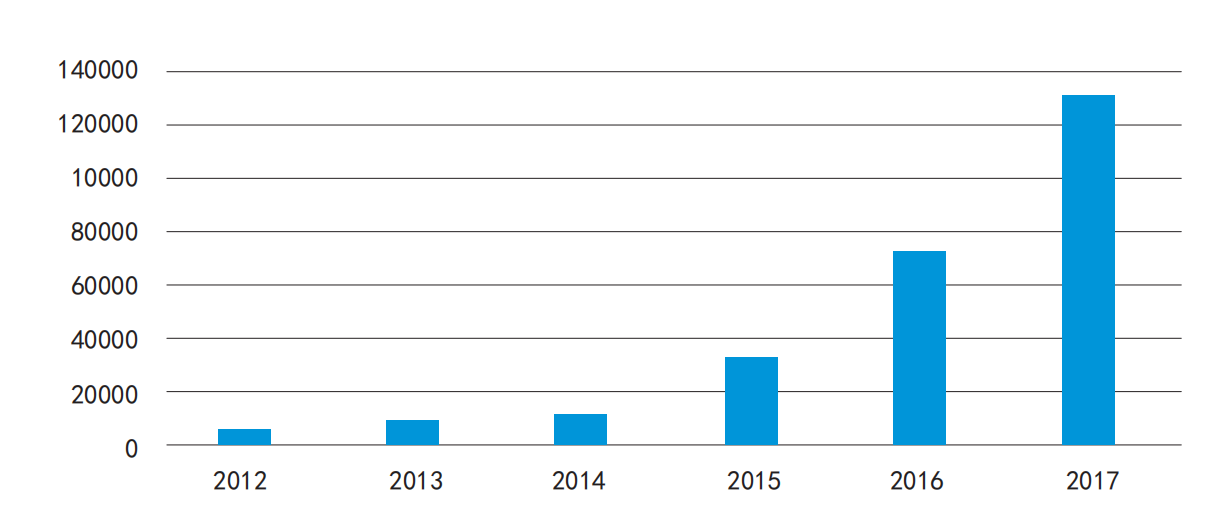
2012-2017年中国国产工业机器产量
2. 研究的基本内容与方案
二、研究(设计)的基本内容、目标、拟采用的技术方案及措施1.本研究的基本内容
1)了解研究对象:本研究将六自由度机械手作为研究对象,以三菱RV-4FL-D机械手为参考研究对象,分析其结构设计和腕部部分的动力装备(液压机械手),以及对该机械手进行正、逆运动学分析和轨迹规划仿真研究。
2)机械手的结构设计:机械结构设计需要完成对机械手的结构设计,以及机械手腕部的动力系统设计。本研究暂定机械手的动力来源是液压系统。机械手六个自由度即为六个自由活动关节。
3)机械手D-H模型:机械臂的几何特性不易描述和计算。为解决这个问题,20 世纪 50 年代,Denavit和 Hartenberg研究出一种描述机器人的通用结构,通过 4×4的齐次变换矩阵代替复杂的运动学计算,大大降低了运算的复杂度。基于D-H法建立机械手的D-H模型并求出其D-H参数表。
4)运动学分析:以正运动学和逆运动学两个方面对机械手在空间中的位姿进行分析计算。
5)机械手轨迹仿真:基于MATLAB对运动学分析的结果进行轨迹规划仿真,在设定关节运动时间之后,求得各关节角度曲线,各关节速度曲线,各关节加速度曲线,末端执行器运动曲线,最终求得机械手实际运动轨迹。基于ADAMS对整个机械手的运动进行运动仿真。
2.研究目标
本文的研究目标主要是为了实现研究内容中的所有工作,具体如下:
1)机械手的结构设计:以六自由度机械手为研究对象进行结构设计,并进行solidworks的模型仿真。
2)机械手的动力系统设计:采用机械手中常用的液压系统,以机械手腕部关节为例,进行其液压系统的设计与分析。
3)D-H参数的计算和D-H模型的计算:基于机械手的设计参数,计算其D-H参数表,应用 MATLAB 仿真软件内Robotics Toolbox的Link()命令,建立机械臂各连杆模型。使用函数 SerialLink将各连杆连接,得到机械臂在该位置的三维模型。
4)机械手的正运动学分析:根据机械臂的坐标变换法则,相连的两连杆间的关系可由齐次变换矩阵表示,通过此变换求得末端执行器的位姿。
5)机械手的逆运动学分析:在已知机械手的连杆的几何参数情况下,给定机器人末端执行器相对参考坐标系的期望位姿,求取机器人能够达到预期位姿的关节变量。6)基于MATLAB的轨迹规划仿真:利用MATLAB仿真平台上的RoboticsToolbox提供的命令可得关节空间、笛卡尔空间内的轨迹规划,求得各关节角度曲线,各关节速度曲线,各关节加速度曲线,末端执行器运动曲线,最终求得机械手实际运动轨迹。
7)基于ADAMS的机械手运动仿真:在ADAMS仿真平台上,以某假想工况对机械手的整体运动流程进行仿真。
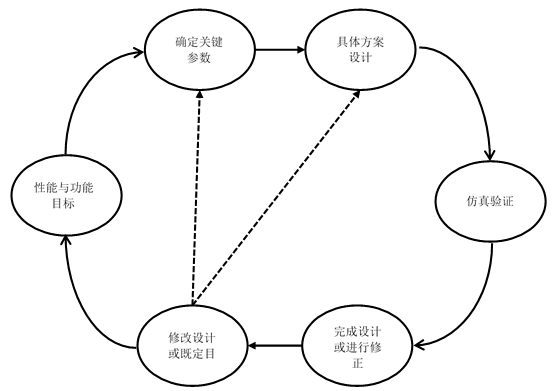
3.拟采用的技术方案及措施
根据所设计机械手的主要性能指标以及现有的加工设备和制造手段,给出设计所需的关键参数列表,设计具体方案,通过仿真、实验等手段确定具体的参数值并对具体设计方案进行修正以保证指标要求。经过多次修改,最终完成机械手的系统设计,具体设计流程图如图所示:
4.全文结构
1)第一章 绪论
①第一节 研究背景
②第二节 发展与现状
2)第二章 6关节串联机械臂结构设计
①第一节 机械臂参数以及solidworks模型设计
②第二节 对机械臂腕部关节的动力分析
3)第三章 基于D-H法的运动学分析
①第一节 机械臂D-H模型建立以及机械臂D-H参数
②第二节 机械臂正向运动学分析
③第三节 逆向运动学分析
4)第四章 机械臂轨迹规划仿真
①第一节 基于MATLAB的轨迹规划仿真
②第二节 基于ADAMS的运动仿真
5)第五章 总结与展望
3. 研究计划与安排
2019.01---2019.03利用ProQuest博硕士学位论文全文数据库(全文)等数据库阅读相关文献,并完成外文文献翻译工作;
2019.03---2019.04 根据论文文献的经验,选择合适的关节零部件,设计机械手臂的整体结构和内部结构;
2019.04---2019.05 基于D-H法求解末端执行器与各零件参数的关系,并且求出机械手臂的工作空间;
2019.05---2019.06 撰写论文,并完成论文答辩工作。
4. 参考文献(12篇以上)
[1]张健,多关节工业串联机器人实时运动规划算法研究.2016[2]王亚洲,多关节串联机器人的建模与运动控制
[3]李瑞霞,李粉霞,et al.基于D-H法的串联机械手臂工作空间分析.机床与液压,2015,43(21):70-73.
[4]王国龙.6R工业机器人轨迹规划算法研究及仿真
[5]Rubinstein R Y,Kroese D P.Simulation and the Monte Carlo Method//Simulation and the Monte Carlo method.
[6]Zannatha J M I,Limon R C.Forward and Inverse Kinematics for a Small-Sized Humanoid Robot//International Conference on Electrical.IEEE,2009.
[7]Kofinas N,Orfanoudakis E,Lagoudakis M G.Complete Analytical Forward and Inverse Kinematics for the NAO Humanoid Robot.Journal of Intelligentamp;Robotic Systems,2015,77(2):251-264.
[8]安军,郑书华,欧阳青,朱宇科.四自由度机械手控制系统的设计[J].现代制造技术与装备,2018(12):87-88.
[9]史旭东,罗义钊,葛翔,袁斌.五关节机械手控制程序设计[J].机床与液压,2017,45(11):72-75.
[10]沈小强. 一种五自由度教学搬运机械手的研制[D].苏州大学,2010.
[11]杨春杰. 多关节机械手设计与运动学研究[D].武汉理工大学,2002.
[12]董辉,李林鑫.水平多关节机械手运动学分析与仿真[J].浙江工业大学学报,2013,41(05):562-566.
[13]翟伟娜. 基于神经网络滑模多自由度机械手轨迹跟踪算法研究[D].河南科技大学,2014.
[14]谭跃刚. 基于非完整约束的欠驱动机械手及其运动控制的研究[D].武汉理工大学,2005.
[15]王彦文.小型多关节工业机器人设计思路及方案之研究[J].南方农机,2015,46(08):95-96.
[16]P. Schlott,A. Geise,G. Grabmair,T. Fritzel,O. Sawodny. A crane-based five-axis manipulator for antenna tests[J]. Control Engineering Practice,2019,85.



