起重的动态特性外文翻译资料
2022-08-23 15:13:27
英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
起重的动态特性
起重机机械
摘要——这个文献考虑了起重机起升机构的运动。分析了当机构质量变化时的卸载过程。由于质量变化,一个反作用力出现了。这个反作用力对系统运动的影响是被调查过。这个机械装置的机械模型为变质量变长度单摆。考虑到一些特殊情况:(i)相对质量变化率是恒定的;(ii)阻尼是变化的,相对长度变化率是恒定的,并且存在风力。得到了除规则运动外可能出现非规则运动的机构参数值。使用Melnikov的方法
导言
运输机器的基本工作部件,例如起重机,是起升机构。它包含一个装载篮和一根绳子。机械装置正在提升或降低负载。弦的质量与把货物装在篮子里。装载篮中的质量在垂直的稳定位置附近振动的绳子上。振动是由弦的质量变化或长度变化引起的或者两者都有,根据工作条件。振动特性的研究是该机制适当工作的最根本的利益:必须消除弦的振动。
起升机构的机械模型是一个简单的具有变质量变长度的数学摆(图1)。
振动摆一直是许多研究者研究的课题。本文[1]回顾了在这一领域进行的调查。考虑了两类摆:定参数摆和变参数摆。文[2-4]考虑变长摆的线性模型,文[5]考虑变质量摆的线性模型。这种考虑的缺点是线性化模型与实际模型不符,Bogolubov和Mitropolski[6]和Nayfeh和Mook[7]对变质量变长度摆的非线性振动进行了研究。他们发展了求二阶微分方程解的渐近方法非线性和慢变量参数。在实际的提升系统中,很明显不仅存在小而大的运动。在这篇文章中,除了规则运动外,不规则的大运动是考虑过的。
在以前的文献中,假设质量变化没有影响,系统中的反作用力等于零。一般情况下,质量随冲击而变化,并且存在反作用力。本文[8]将反作用力纳入变质量摆运动分析中。假设反作用力很小。尽管其强度的结论是,反作用力对系统性和不可忽视性。因此,本文中的反作用力考虑过的。值得一提的是,在实际起升机构的动力分析中,通常忽略了荷载篮的质量变化和长度变化。在本文中,影响考虑了质量和长度的变化。
图1。起升机构模型。
机构的数学模型
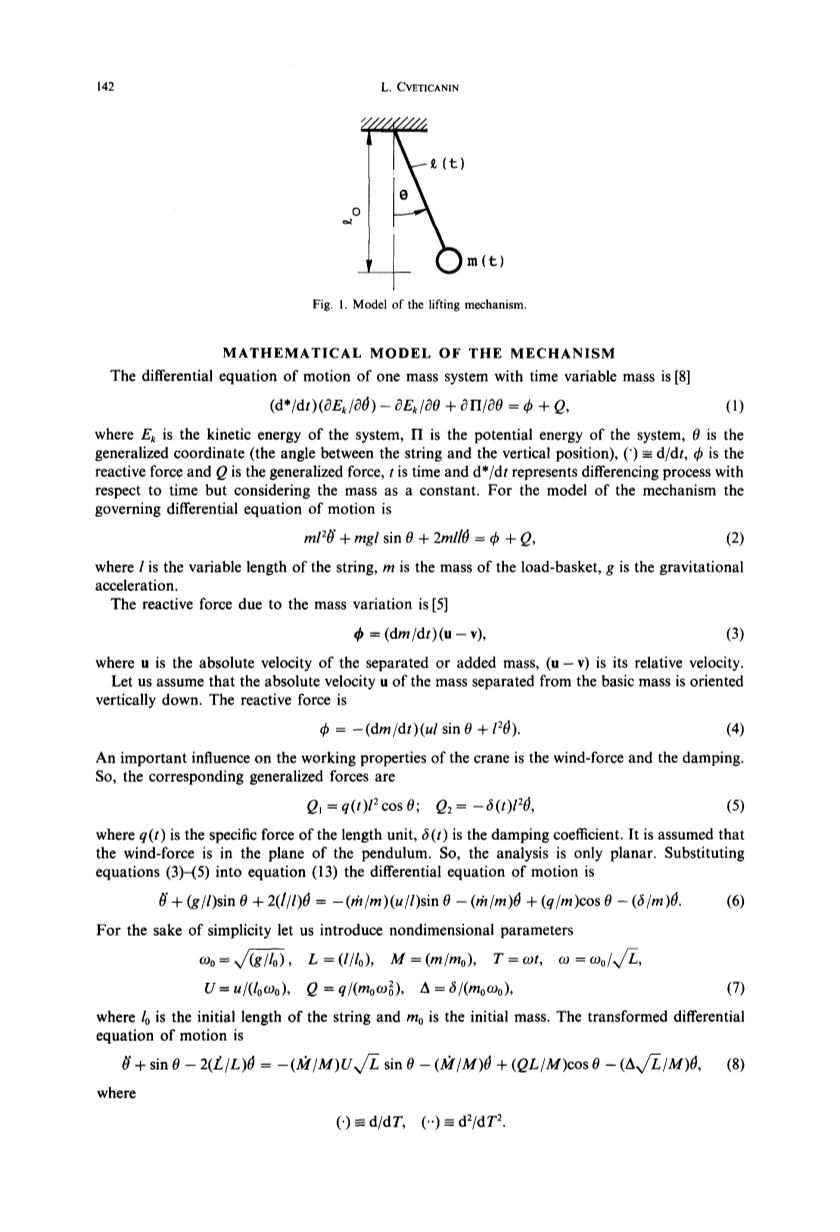
具有时变质量的质量系统的运动微分方程为[8]
式中,Ek为系统动能,II为系统势能,0为广义坐标(弦与垂直位置的夹角),()-d/d t,phi;为反作用力,Q为广义力,t为时间,d*/dt为时间微分过程,但将质量作为不变。对于机构的模型,运动的控制微分方程是
其中,l是弦的可变长度,m是荷载篮的质量,g是重力加速度。
质量变化引起的反作用力为[5]
其中u是分离或附加质量的绝对速度,(u-v)是其相对速度。
假设从基本质量中分离出来的质量的绝对速度u是垂直向下的。反作用力是
风力和阻尼是影响起重机工作性能的重要因素。相应的广义力是
式中,q(t)为长度单位的比力,delta;(t)为阻尼系数。假定风力在钟摆的平面上。所以,分析只是平面的。将方程(3)-(5)代入方程(13)运动微分方程为
为了简单起见,让我们引入无量纲参数
其中l0是字符串的初始长度,m0是初始质量。转换后的运动微分方程是
这里
它是具有时变参数的二阶非线性微分方程。方程的解给出了系统动力学行为的答案。在一般情况下,众所周知,不可能找到解析形式的解。只有在某些特殊情况下才能得到解析解。让我们考虑一下这些特殊情况。
很明显,质量和长度的变化会引起系统运动的扰动。有必要根据这些变化来分析可能存在什么样的运动。最微妙的程序是卸下装载篮。这样做的目的是使卸货尽可能正确。这意味着装载篮不是在卸载过程中移动,即阻尼变化。此外,卸货必须足够快。
起重机吊篮的卸载
通常卸货有两种方式:
- 装载篮通过一根绳子降到较低的水平,然后卸载。
- 在卸料的同时降低装料架。
让我们考虑一下两个案子。
(A)定长机构卸载
吊篮通过一根绳子降到较低的水平,然后开始卸货。这时弦的长度是恒定的,但质量是变化的。
忽略阻尼
让我们考虑一下忽略阻尼的情况。描述运动的微分方程是
对于质量变化为
运动是
其中00和00是初始条件。这项运动是非周期性的。在图2中,绘制了各种U值的0-T图。振动的振幅有增大的趋势:速度U越高,增大的速度越慢。
阻尼力作用
让我们考虑一下阻尼作用的情况。假设阻尼是一个时变函数,并且
对于质量变化
式中~=常数,r=ET为慢无量纲时间,E为小参数,式(8)转换为
让我们考虑方程(14)所描述的运动。首先必须分析未受干扰的情况。得到了同宿轨道和周期轨道。轨道会被扰动。利用Melnikov准则可以判断是否存在非规则运动。
平静的案例。当摄动被忽略时(c=0),运动微分方程为
它对应于常参数摆的数学模型。值得一提的是,当质量分离的相对速度为零(无冲击的质量变化)时,机构的行为与具有恒定质量的机构相同。方程(15)在许多文献中得到了广泛的考虑,得到了系统的能量积分(见参考文献[9])
其中h是定义运动的常数:对于hgt;2,为连续旋转;对于存在关于悬挂稳定状态的hlt;2振荡(图3)。振荡是强周期的。运动取决于起始条件,即位移和它的时间导数,用来定义一个独特的轨迹。在图4中,相图绘制。从图中可以明显看出,分离线曲线将振荡与旋转。此曲线表示一对同宿轨道,定义为
其中
很明显,在同宿轨道内存在周期轨道。无扰系统的周期轨道满足以下关
这些闭水平曲线是用椭圆函数表示的
其中sn和dn是Jacobi椭圆函数。
这样一条未受干扰的闭合曲线的周期是
起重机机构的动态特性
图3。不同起动条件下无冲击质量变化的摆幅-时间图。
其中,或
其中K(K)是第一类完全椭圆积分。
图4。摆的相位轨迹,其质量在不受冲击的情况下变化。
平面同宿轨道的扰动。应用基于同宿轨道摄动的Melnikov方法,得到了出现不规则运动的参数。方程(14)的Melnikov函数是
将式(18)代入式(22)为
在较低的轨道上
如果Melnikov函数有简单的零点并且与E无关,那么对于~足够小,稳定流形和不稳定流形横向相交[10]。它代表了混沌运动和小马蹄形运动存在的条件。函数有一个简单的零
这是混乱的必要条件,但还不够。
所得结果与Guckenheimer和Holmes[10]对具有弱恒转矩和阻尼的平面摆的讨论是一致的。上同宿轨道在与直线(20)相切且U=0的唯一曲线上的同宿分支中生存。
在图5中,绘制了各种U值的El、-eJ、C曲线。对于曲线上方的参数值,可能会出现混沌运动。
次谐波轨道的扰动。下一个问题是是否有其他不变曲线在扰动下保持不变。周期轨道由方程(19)描述。引入扰动。对扰动系统建立了次谐波Melnikov函数
图5。不同U值的Ehl~e曲线。
使用关系式(18),积分可以重写为
其中E(k)是第二类完全积分(见参考文献[l I,12])。
对于h--2,等式(26)简化为等式(23)。对这一结果的讨论与Guckenheimer和Holmes的论文[10]中的讨论是一致的。这意味着,对于Ugt;2的所有值,都有一个h的值M(g,l,U,h)-O。因此,扰动系统(14)也具有周期Th的次谐波轨道。
当分离质量的绝对速度为零时,机构的模型为
是分叉值。在图6和图7中,绘制了、和的相位平面和振幅-时间图。
阻尼力是一个时变函数
假设阻尼根据关系变化
数学模型是
对于无扰系统,分离线曲线内的同宿轨道和周期轨道分别由方程(17)和(19)定义。引入轨道摄动,定义了混沌运动的条件。
平面同宿轨道的扰动。根据前例的步骤,形成了Melnikov函数
图6。,和的相图
图7。,和的振幅-时间图。
根据方程式(17),它是
Melnikov函数有一个简单的零
如果我们定义
对于~f f/6jgt;R°(f~),扰动同宿轨道横向相交。在图8中,绘制了U的恒定值的R°(f2)。随着f~,曲线有增大的趋势。
此外,由于J/在~/6,=R°(f~)时具有二次零点,因此U=2是发生二次同宿切点的分叉值。
次谐波轨道的扰动。除了研究同宿轨道的扰动外,我们还必须考虑F 0范围内的闭水平曲线的扰动。现在我们计算了共振周期轨道的次谐波Melnikov函数。共振条件是
其中,对于p的每一个选择,q可以唯一地解出k(p,q),从而得到一个唯一的共振轨道。
让我们扰动轨道。次谐波Melnikov函数是
使用v--d0/dT,方程(18)和(19),积分可以重写为
图8。R°(f2)对于U的恒定值。
利用方程(19)的傅里叶级数和积分(见参考文献[8,9]),我们得到
其中
定义
我们的结论是,如果JV~/fjgt;RP/q(~“~),则在与~=RP/q(~)61相切的分叉曲线上出现一对次谐波。在图9中显示了一些分叉曲线RP/q(~2)。
(B)下降和卸载
降低过程中风力的影响是明显的。假设卸载时没有冲击,但风力作用满足以下关系
长度变化是
式中,fl=常数。这项动议被描述为
除了质量和长度的变化外,风力还会引起扰动。这些扰动会导致混沌运动。应用Melnikov准则得到了混沌运动的参数值。Melnikov函数是
图9。分叉曲线RP/q(~)。
整合之后
这里Melnikov函数与时间无关,因为方程(42)是一个自治系统。函数有简单的零
fl/W~gt;O出现混沌运动。
在实际系统中,未受扰动系统的运动由周期轨道表示。我们想知道这些是否会由于长度变化和风力而在扰动下保留下来。形成了次谐波Melnikov函数
对于周期为20的轨道(19)。Melnikov函数有简单的零
对结果的讨论与A部分相同。
lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[237687],资料为PDF文档或Word文档,PDF文档可免费转换为Word



