基于分布式电梯控制系统的开发 微控制器PIC18F458外文翻译资料
2022-08-23 15:30:09

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于分布式电梯控制系统的开发 微控制器PIC18F458
胡塞因贝戈维奇
摘录-介绍了电梯分布式控制系统(DECS).本文根据现有电梯系统的特点,选择了电动曳引电梯。与现代控制系统(大量电缆、安全问题等)相比,传统的电梯控制系统(ECS)有几个缺点。传统ECS的另一种选择是DECS。 本文提出了一种基于CAN(控制器区域网络)协议的DECS.所提出的ECS由三个模块组成CU电梯(CU-控制单元),CU舱,CU层.详细介绍了基于PIC18F458单片机的模块、控制原理和实现方法。本文介绍了CAN协议总线上的消息调度
带有11位标识符且没有数据字段的消息已用于分布式控制系统的合成。对总线可用性/流量的时间分析表明,基于定义的消息和5种给出的操作模式,分布式控制系统的充分性已经形成了每个控制系统模块的操作算法。最后给出了一种基于CAN的电梯控制系统的实验结果。进行的测试证实了电梯控制系统的功能。
Ⅰ.导言
第一次电气控制是通过继电器技术实现的 。在20世纪70年代,继电器设备的原理被应用于电子控制[1]。第一个完全基于微处理器的控制系统是在20世纪80年代初开发的[2]。我们已经利用PLC改进了住宅中继电器控制电梯的电气控制系统[3]。
分布式电梯控制系统取代了基于微处理器和/或PLC的集中控制系统,成为近10年电子系统自动化的主导设备。分布式电梯控制系统是由几个独立的智能控制单元/模块/站创建的。控制单元可以用单个微控制器/微处理器单元、PLC、嵌入式计算机或PC实现[4]-[7]。
目前工业控制电梯系统的发展趋势是基于微控制器/微处理器或FPGA设计分布式电梯控制系统。
本文分为六个部分 第二部分介绍了我们的DECS体系结构,以及电梯系统的一些详细特征。第三和第四节介绍了基于微控制器PIC18F458和CAN总线的模块DECS的硬件结构和软件流程图 ,第五节提供了一些实验结果。 结论见第六节。
Ⅱ. DECs 结构
电梯系统的技术特点是:电梯系统由64层的单/双舱组成。每层都有一个请求一个或两个按钮,一个控制灯和一个显示方向的旅行指示和电梯舱的当前位置。电梯舱当前位置和加速/减速的传感器位于每一层。机舱有一个单/双门,可以手动打开/关闭,自动或自动frac12;。在机舱活动期间,门必须关闭。 两个传感器通知控制系统门的位置。光学传感器可以在门关闭时检测物体。 在电梯舱内有一个带有请求按钮、控制灯和显示旅行指示方向和机舱当前位置的面板。电梯客舱发动机上下移动客舱.. 机舱移动的限制是使用两个限制开关的顶部和底部电梯位置(安全开关)。
图 1.给出了作者提出的分布式电梯控制系统(DECS)的体系结构。电梯控制系统的基本组成分是:CU电梯(CUE)、CU舱(CUC)和CU地板(CUF)(CU代表控制单元)。
上述所有模块都是基于微控制器的结构。为了实现DECS微芯片PIC18F458单片机。
这种特殊类型的微控制器是根据很少不同的标准选择的:技术要求、价格、集成以及个人影响。在当今最流行的通信网络中,即。 设备网、Modbus、Profibus、以太网、CAN、基础现场总线等,选择CAN网络作为DECS的通信网络。协议的简单性、硬件价格和数据传输安全性是网络选择的标准[8]、[9]。
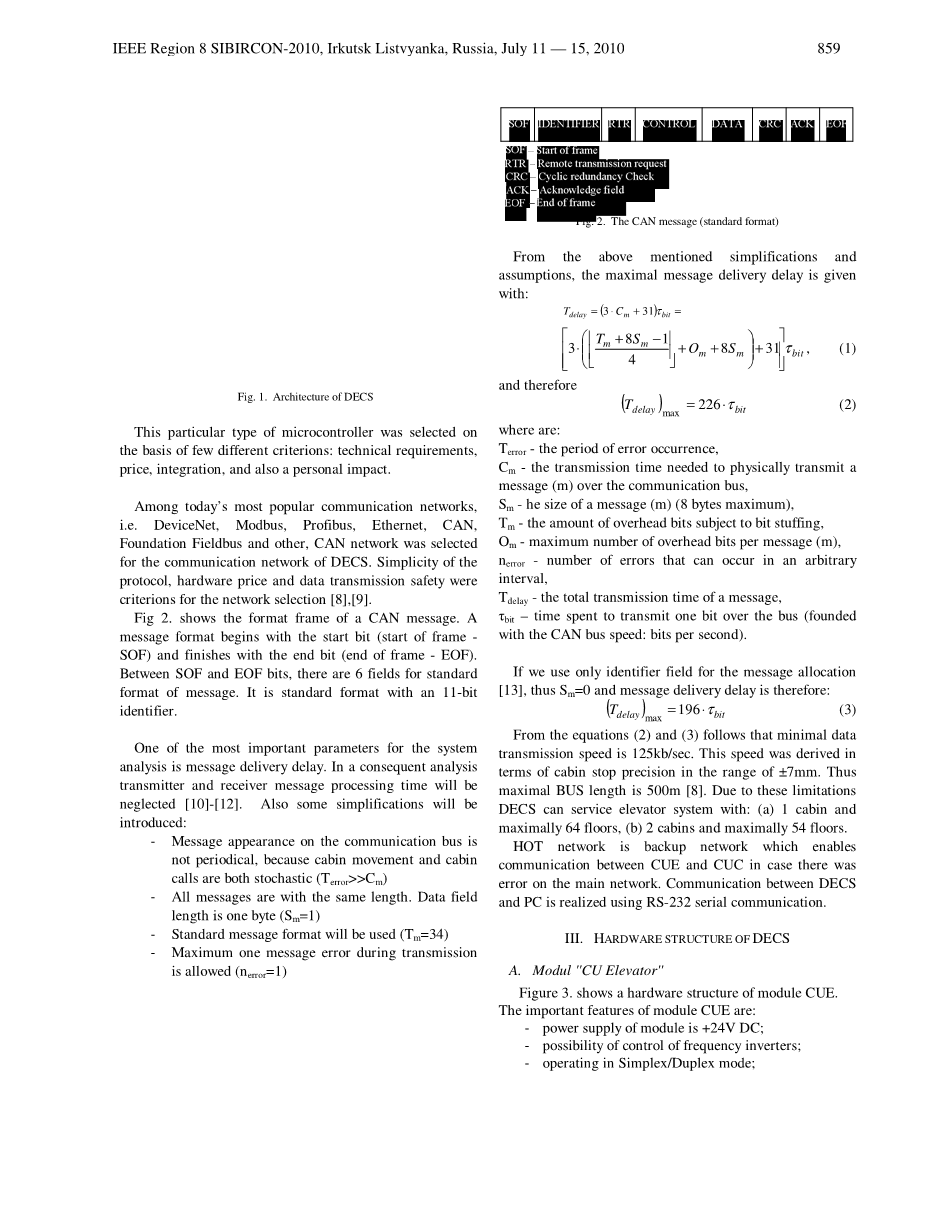
图2显示了CAN消息的格式框架。消息格式以开始位(帧-SOF的开始)开始,以结束位(帧-EOF的结束)结束。在SOF和EO F位之间,有6个字段用于标准格式的消息。 它是具有11位标识符的标准格式。
系统分析最重要的参数之一是消息传递延迟。在随后的分析中,发射机和接收机消息处理时间将被忽略[10]-[12]。此外,还将进行一些简化:
-通信总线上的消息外观不是周期性的,因为客舱移动和客舱呼叫都是随机的(Terrorgt;gt;Cm)
-所有的消息都有相同的长度。 数据字段长度为一个字节(Sm=1)
-将使用标准消息格式(TM=34)
-允许传输期间最大一个消息错误(Nerror=1)
根据上述简化和假设,给出了最大的消息传递延迟:
式中:
Terror - 错误发生的时期
Cm - 在通信总线上物理传输消息(M)所需的传输时间
Sm - 消息(M)的大小(最大8字节)
Tm -受钻头填料影响的架空钻头数量
Om-每条消息的最大开销位数(m)
Nerror-在任意间隔内可能发生的错误数
Tdelay - 消息的总传输时间
tau; bit – 用于在总线上传输一个位的时间(以CAN总线速度建立:每秒 位)。
如果我们只使用标识符字段进行消息分配[13],因此Sm=0,因此消息传递延迟是:
由方程(2)和(3)可知,最小数据传输速度为125kb/s。这种速度是根据机舱停止精度在plusmn;7mm范围内导出的。因此,最大BUS长度为500m[8]。由于这些限制,DECS可以使用电梯系统:(a)1个舱室,最大64层,(b)2个舱室,最多54层。
HOT网络是一种备份网络,在主网络出现错误的情况下实现CUE和CUC之间的通信
采用RS-232串行通信实现DECS与PC机之间的通信..
III.DCEs的硬件排列
A.CU电梯模式
图3显示了模块CUE的硬件结构。 模块CUE的重要特点是:
模块电源为24V直流;
变频器控制的可能性;
操作 简单/复杂 模式;
机舱起始层的定义;
在液晶显示器上显示机舱位置和旅行舱方向;
液晶显示器故障状态的指示和登记
RS-232与个人电脑通讯;
最多8种操作模式;
13项投入;
21项产出;
- CU舱模式
图4显示了模块CUE的硬件结构。 模块CUE的重要特点是:
模块电源为24V直流;
手动、frac12;自动或自动门的控制;
机舱位置在7段显示器上显示;
在LED二极管上指示旅行舱的方向;
控制电梯最多5层在主板上,或13,21与分机;
负荷控制(满负荷,过负荷);
控制机舱内的光线;
维护控制功能;
预订控制功能。
消防功能;
可以在舱内手动或自动控制通风机
控制舱内的扬声器
17种输入
8种输出
- CU楼层模式
图5显示了模块CUE的硬件结构。 模块CUE的重要特点是:
模块电源为24V直流;
标准或不同类型集体控制的可能性;
机舱位置在7段显示器上显示;
在LED二极管上指示旅行舱的方向;
2种输入
2种输出
Ⅳ.DECS的软件设计
-
DECS中的定义消息
电梯控制系统可能发送和接收消息的流程图如图6所示。它由三种类型的CAN消息组成,由于它们的相对重要性,表示绿色、黄色和红色。红色消息具有最高优先级,而绿色消息具有最低优先级。
对CAN协议进行短信优化..分布式电梯控制系统的CU之间可以交换的消息列于表一。在本文中,我们将只关注CAN标识符字段,它是CAN网络上消息调度的基础[14]。
-
DECS模块的控制算法
图 7显示“CU楼层”模块的控制流程图。 流程图由三个过程组成:“初始化”、“接收消息”和“发生呼叫”。 所有程序的流程图在图7中详细给出。
“CU舱”模块流程图由六个过程组成:“初始化”、“接收消息”和“呼叫发生”,以及三个简单的过程“舱减速”、“舱稳定”和“舱落地”。“CU电梯”模块流程图由四个过程组成:“初始化”、“接收消息”、“极端位置”和“移动舱”。
- BUS可用性/模糊性时间分析
为了对总线可用性/繁忙性进行时间分析,将采用以下参数:
地板高度hsp=3m;
SS和US或LS磁铁之间的距离hu=0.5m;
电梯以两种速度运行vbr=4m/s and vsp=0.5m/s;
通信总线上的数据传输25kbps (tau;bit=8mu;s)
信息长度是Cm=55·tau;bit=0.44ms. 还将假定:
将使用叠加定律(我们只分析一次呼叫的服务);
接到电话后立即开始电话服务;
忽略消息延迟和处理
当客舱到要求的楼层时,我们将不清点楼层
为了获得总线可用性/繁忙度度量,我们将分析两种可能发生的不同情况(图8)呼叫服务的时间取决于楼层服务的时间,因此对总线可用性/繁忙性的分析可以简化为只对一个呼叫进行分析。测量可用性/繁忙度的时间段,是从当前位置到所需地板之间的时间。
图9.BUS可用性/繁忙程度与楼层数
我们将首先考虑的情况发生呼叫时,我们将首先考虑这种情况。 在这种情况下,出现在总线上的消息数量是nm(0)=7.整个“楼层服务”周期的持续时间为:
式中:Tosp(0) 是连续两层之间的“楼层呼叫”服务时间;Tp是电梯以速度vb移动的时间;Tusp是电梯以速度vsp移动的时间 (电梯减速)。
根据所采用的参数和已经假定的事实如下:
由(5)可以得出
基于上述,我们可以得出结论,同样的程序可以用于客舱呼叫。 所以通话的一般关系是:
式中:Top(k) 是维修“楼层呼叫”或“客舱呼叫”的时间在两层之间,K层内。
图19描述了BUS的可用性/繁忙程度与当前电梯位置和呼叫来自的楼层之间的楼层数。由于这一楼层的数量增加了BUS的可用性/繁忙程度。 总线可用性/繁忙度的最大值是:
因此极大值(nsab)max等于呼叫服务所需时间的0.234%。
- DECS调节
为了正确操作,在DECS开始前必须设置的参数如下:
-舱室数目(1或2)
-楼层数(1至64)
-电机控制(继电器或变频器)
-楼层呼叫按钮数量(1或2)
-工作算法(单工或双工)
-舱门类型(手动、frac12;自动或自动)
-舱门关闭时间(0至30秒)
-起始楼层(1-64)
设置的参数使用软件,通过RS232连接器执行。 我们可以增加更多的参数,因为不同的要求,如安全,舒适等。
Ⅴ.测试结果
为了系统性能和功能,进行了以下分析和测量,并实施了算法测试:传输时间(T pred)和接收消息时间(T pri)的测量:与系统中测量的其他时间相比,Tpred和Tpriare可以忽略不计。
测量总线上13种不同消息类型的持续时间:DECS消息的持续时间在368micro;s和376micro;s之间变化,这取决于填充控制位的数量。 与时间cm相比,基于CAN总线的时间分析,测量时间要短得多[14]。
DECS模块的功能测试:为每个模块开发了测试程序. 基于这个程序,对每个模块的输入和输出进行了测试,以及模块结构中包含的其他元素(液晶显示器、MCP2551、7段显示器、LED二极管等)
整体系统的功能测试:对于整体系统的功能测试,模块“CU电梯”、“CU舱”和“CU楼层”(2个模块为2楼和5楼)已连接在公共CAN总线上。 所有这些模块都已编程,以便对整个系统进行功能测试。 系统测试程序是:
初始化
机舱在底层的定位
五楼发出接收指令
回应五楼的指令
三楼的客舱收到指令
回应三楼的客舱指令
没有观察到系统偏离上述程序。 根据这一观察,我们可以得出结论,该系统在实际电梯上安装后将表现正确。
温度对整个系统功能影响的测试:所有测试都是在温度室FeutronK PK400中完成的,根据标准IEC61131-2[15]。温度在-10°C至55°C之间变化。 模块“CU电梯”和“CU舱”在室内,模块“CU楼层”在外面。在测试过程中,系统被打开和关闭了几次。 经过九个小时的测试,定义的算法没有偏差。
Ⅵ.结论
在DECS系统中使用CAN通信是合理的。 基于CANBUS只使用11位标识符而不使用数据字段,对于消息的组织和调度,可以服务多达64层和两个舱室。
提出的DECS框架由三种类型的模块组成:“CU电梯”、“CU舱”和“CU楼层”模块。 所有这些模块都满足技术要求和电梯标准,而且价格相对较低(使用的电子元器件相对便宜,安装容易,安装价格低等)。
测试结果表明,DECS在本文中的定义完全满足了实际系统中工作的所有条件。 提交的DECS也非常适合于分布式系统领域的研究目的。
为了进一步工作,将开发并测试不同的电梯控制算法。
参考书目
[1] V.Matijevic,P.Vranic:“基于集成电路的选择性-选择性电梯控制”,IEEETrans。 关于工业应用,第一卷。 1972年11月/12月6日
[2]M.-L.Siikonen:“高层建筑高地的规划和控制模式”,研究报告,通力公司,1997年10月
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[237407],资料为PDF文档或Word文档,PDF文档可免费转换为Word



