在线监测造船式门机应力的稳定性外文翻译资料
2022-09-15 15:01:49

英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
在线监测造船式门机应力的稳定性
Qingliang Niu1,a, Weixiao Tang1,b, Nan Shan2,c, Xueping Zhao2,
机械工程学院,山东大学,济南市250061P.R中国公关
青岛特种设备检验研究院,青岛266071P.R中国公关
相应邮箱:niuqingliang@outlook.com tangwx@sdu.edu.cn qizhongyike@163.com
关键词:造船式起重机,在线监测,动态响应,稳定性,漂移
摘要:目前,起重机的信号监测的稳定性和的高成本问题,已经成为起重机应力在线监测所面临的最大问题。因此,针对该问题,本文专门为造船式起重机设计了一个监测其应力稳定性的项目,该项目采用的是将有线监测的方法与应变测量点信号初次放大的方法相结合起来,该监测方式旣可以克服应变信号的衰减,又能解决电池干扰的问题。接收器的定点重置很好的避免了漂移的问题。造船式的门机在线监测应力的实验项目在船厂已经运行了5年,实验结果已经证明其该应力监测的方式可以将相对误差控制在低于6%的范围内,与无线监测的方式相比较,该项目成本更低,并且不受电磁干扰。此外,与传统式的有线检测的方式相比较,该方案具有有更多的稳定性的信号,可更方便监测。
介绍说明
造船式门座起重机是一种间歇式的工作机械,其优势在于其起升高度高(门架较高),工作跨度较大,能够承受大载荷的负载等等,而且造船式门机能够在较为恶劣的环境工作下,也具有较长的使用周期。但是,一旦造船式门座起重机由于疲劳破坏,稳定性的破坏或者其他原因,而导致起重机结构发生破坏,遭受安全事故。将会导致大巨大的经济损失,甚至将会面临生命安全的损失。
在起重机结构强度的评价指标中,应力是最重要的指标之一。目前,在我国使用的大型机械设备中,监测应力的方式采用的依然是有线的监测方式【1】,但有线监测的方式存在缺陷,我们不但需要进行布线,并且大量的通信数据将会影响到起重机的正常运行。无线监测的方式是一种新型的监测应力的方法,具有安装简单和方便数据的传输的优点,并且特别适用于短期的测量。
目前,在相对恶劣的环境中【4】,且缺乏在线监测长期稳定性系统的情况下,起重机的监测仍然采用的是常规的检测系统【2,3】。在门式起重机运行的时候,陈洪庆【5】将电阻应变计的电力法应用于在线监测门式起重机的静应力,和监测门式起重机的动态效应中,并提出需要定期检查的建议和方法,但却缺乏对应力监测的实时研究。张翀【6】的设计中,利用反射光谱的光纤传感器的温度变化来在线监测门座起重机的应力,但仍然缺乏对抗干扰的设计研究。
因此,在线监测应力的最大问题是系统的稳定性问题。而该系统的稳定性通常指的是随着时间的变化,还能保持着较高的测量精度的能力。漂移,是在线监测系统的稳定性重要的衡量指标之一。针对这一问题,作者们设计了一个用于造船门座起重机的在线监测长期稳定工作的项目,并且已经取得了良好的试验结果。
在线监测应力方案的设计
在线监测的过程中,影响应力信号稳定性的因素有两个方面,一个是工作环境的干扰,另一个是设备本身具有的问题。环境的干扰主要包括机械设备的振动,天气变化的问题,电磁波的干扰等等。设备出现的问题主要包括设备存在漂移的现象,将会导致设备的使用状况受到限制,还会出现应变信号衰减的现象等等。综合以上因素考虑,则需要具备较强的抗干扰性能力和有线监测方法应具有较成熟的技术特征,因此该项目选择采用数据传输的模式进行应力监测。
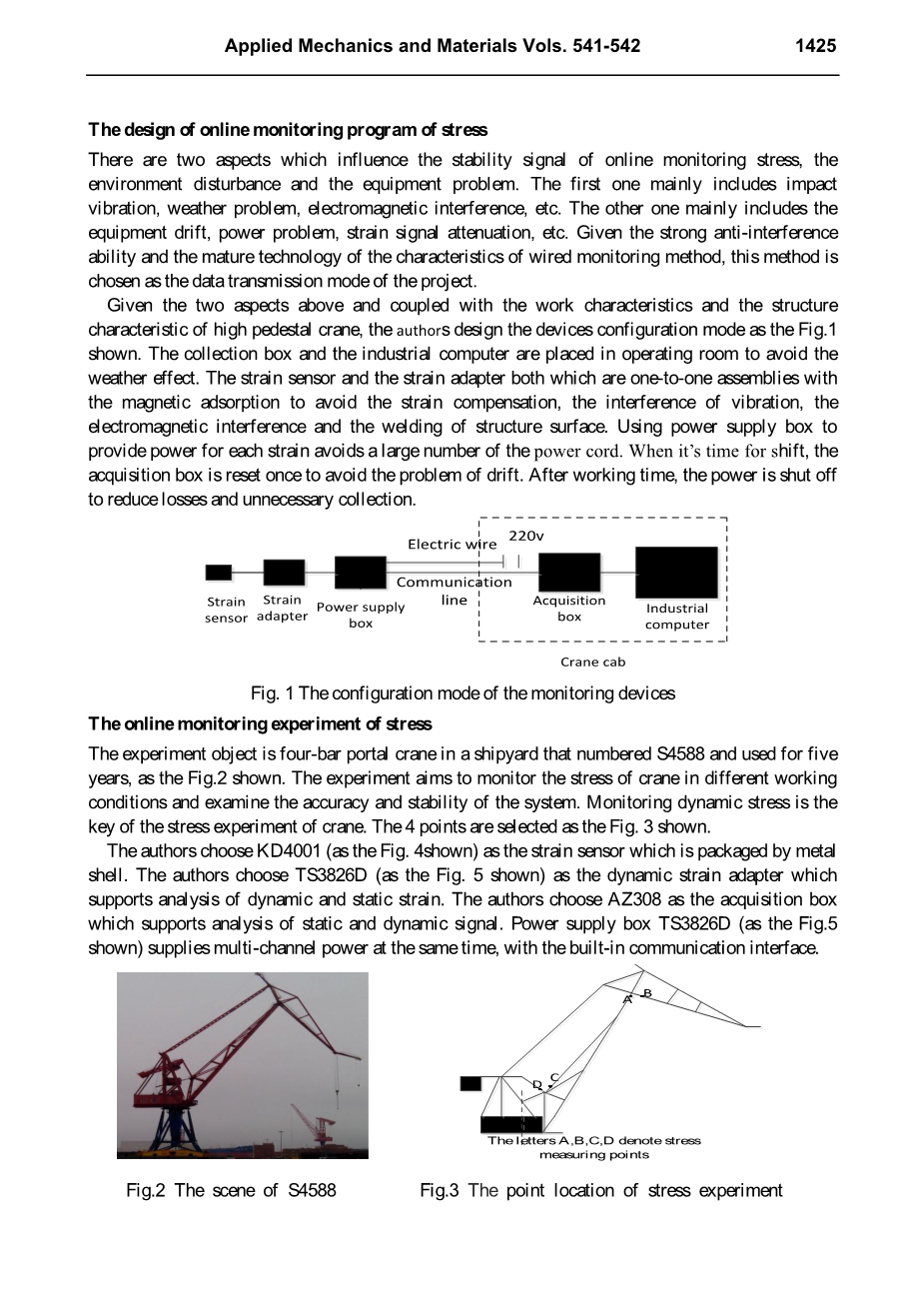
鉴于上面所述的两个方面以外,还需要考虑到门座起重机门架高的结构特点,以及门座起重机运行时的工作特点。作者设计的设备配置模式如图一所示。为了避免天气变化的影响,需要将信号采集箱与工程所用的电脑放置于实验室内。考虑到压力的补偿,振动和电磁的双重干扰,以及门式起重机属于焊接件结构,在信号采集时,使用电磁吸附将应变传感器与应变适配器一对一的信号采集法。为了避免布置大量的电源线,且在每次为应变监测提供电力时,我们可以采用电源器来进行供电。在进行转换的时候,为了避免漂移带来的误差,我们需要将采集箱进行重新设置。工作结束后,为了减少不必要的损失和非必要性采集的时候,我们需要将电源切断。
图一:监测设备的配置模式
应力的在线监测实验
该实验编号是S4588,实验的对象是四连杆门座式起重机,实验地点是一个船厂,并且实验已经运行了5年,如图二所示。实验的目的:在不同的工作环境下,监测起重机的应力条件,以及检测系统的稳定性和准确性。然而,检测起重机的动态响应是该起重机应力实验的关键。四个应力点的选择如图三所示。
作者选择了编号为KD4001的应变传感器(如图四所示),其由金属进行封装,选择了编号为TS3826D的动态应变适配器(如图五所示),该应变适配器同时支持静态和动态的应变分析。同时,选择了可以支持静态和动态信号分析的信号采集盒,编号为AZ308. 在同一时间显示的电源箱编号为TS3826D(如图五所示),使用内置的通信接口,可以同时提供多路电源。
图二:S4588的现场图 图三:应力实验的载荷点
图四:KD4001传感器 图五:TS3826D适配器 TS3826D电源
应力实验的环境描述为表一,该实验的结构强度标准是根据港口门座起重机的GB/T17495-2009[7],以及S4588起升能力曲线和船厂的安全标准共同决定所得。考虑到造船式门座起重机在其工作载荷30吨的运行条件下,这起升重量的测试只需在第三个工况下进行。根据表一情况可知,每个八小时收集一次数据。
表一:检测应力实验的工况
|
序列号 |
杆的初始位置 |
负载 |
初始边界 |
作业过程 |
|
I |
杆的旋转平面 |
20吨 |
76米 |
起升到最高点——旋转90°——变换振幅到44米 |
|
II |
平行线的路径 |
30吨 |
60米 |
起升到最高点——旋转90°——变换振幅到44米 |
|
III |
45吨 |
54米 |
起升高度为10米 |
实验数据的分析
在起升和变幅的运行条件下,可以通过对测量数据的处理,进行系统的稳定性分析,相对误差和系统的漂移的计算也是出于相同的情况下进行的。如果系统的相对误差低于10%时,证明系统的稳定性较为良好。在第三工况下,应变点A,B和C的应变曲线如下图六所示。应变点D的曲线(图六所述)描述的是在第二种工况下的变幅过程中的应力变化。
图六:A,B,C,D的应变曲线
表三:A,B,C,D的应变值
|
应变点 |
2S~4S |
10S~12S |
19S~21S |
24S~26S |
34S~36S |
|||||
|
A |
I |
-159.90 |
-119.51 |
-326.43 |
-370.79 |
-280.52 |
||||
|
II |
-142.50 |
-106.56 |
-308.50 |
-352.54 |
-261.96 |
|||||
|
Idelta; |
14.4 |
12.95 |
17.68 |
18.25 |
18.56 |
|||||
|
B |
I |
-143.25 |
-207.36 |
-326.27 |
-267.29 |
-248.43 |
||||
|
II |
-129.47 |
-190.13 |
-310.48 |
-250.15 |
-230.56 |
|||||
|
Idelta; |
13.78 |
17.23 |
15.79 |
17.14 |
17.84 |
|||||
|
C |
I |
155.26 |
-60.78 |
160.47 |
79.68 |
100.23 |
||||
|
II |
166.34 |
-71.26 |
171.13 |
90.29 |
113.15 |
|||||
|
Idelta; |
11.08 |
10.48 |
10.66 |
10.61 |
12.92 |
|||||
|
D |
I |
-68.13 |
56.64 |
139.28 |
245.12 |
335.49 |
||||
|
II |
-79.25 |
66.79 |
153.74 |
261.39 |
353.12 |
|||||
|
Idelta; |
11.12 |
10.15 |
14.46 |
16.27 |
17.63 |
|||||
如我们所知,系统的漂移大概在0.01mu;和0.02mu;之间浮动。根据相对误差的公式(delta;s表示的是8小时
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148807],资料为PDF文档或Word文档,PDF文档可免费转换为Word



