基于起重机水平变幅轨迹的 结构设计优化和基于强度的尺寸优化外文翻译资料
2022-10-31 14:34:49

英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
基于起重机水平变幅轨迹的
结构设计优化和基于强度的尺寸优化
摘要
本研究探讨了利用双摇杆四杆机构的轨迹优化使其轨迹的振幅最小化。首先开发水平起重机(LLC)的数值模型来描述轨迹机制,然后在选择优化设计变量后确定最优轨迹实验设计环境,将获得的数值优化解与测量数据进行比较。将优化后的轨迹设计应用于基于强度的最小化重量的双摇杆机构在约束应力和挠曲下的确定性优化(DO),进行基于二阶的响应面法多项式的近似优化。 由于在实际环境中存在设计不确定性,利用基于可靠性的设计优化(RBDO)来评估应力和偏转失效的概率。为了设计安全,利用DO和RBDO方式的在重载条件的情况下进行评估。
关键词:双摇臂;水平变幅门座式起重机;轨迹控制;实验设计;表面响应法;确定性优化;基于优化设计的可靠性分析
1 简介
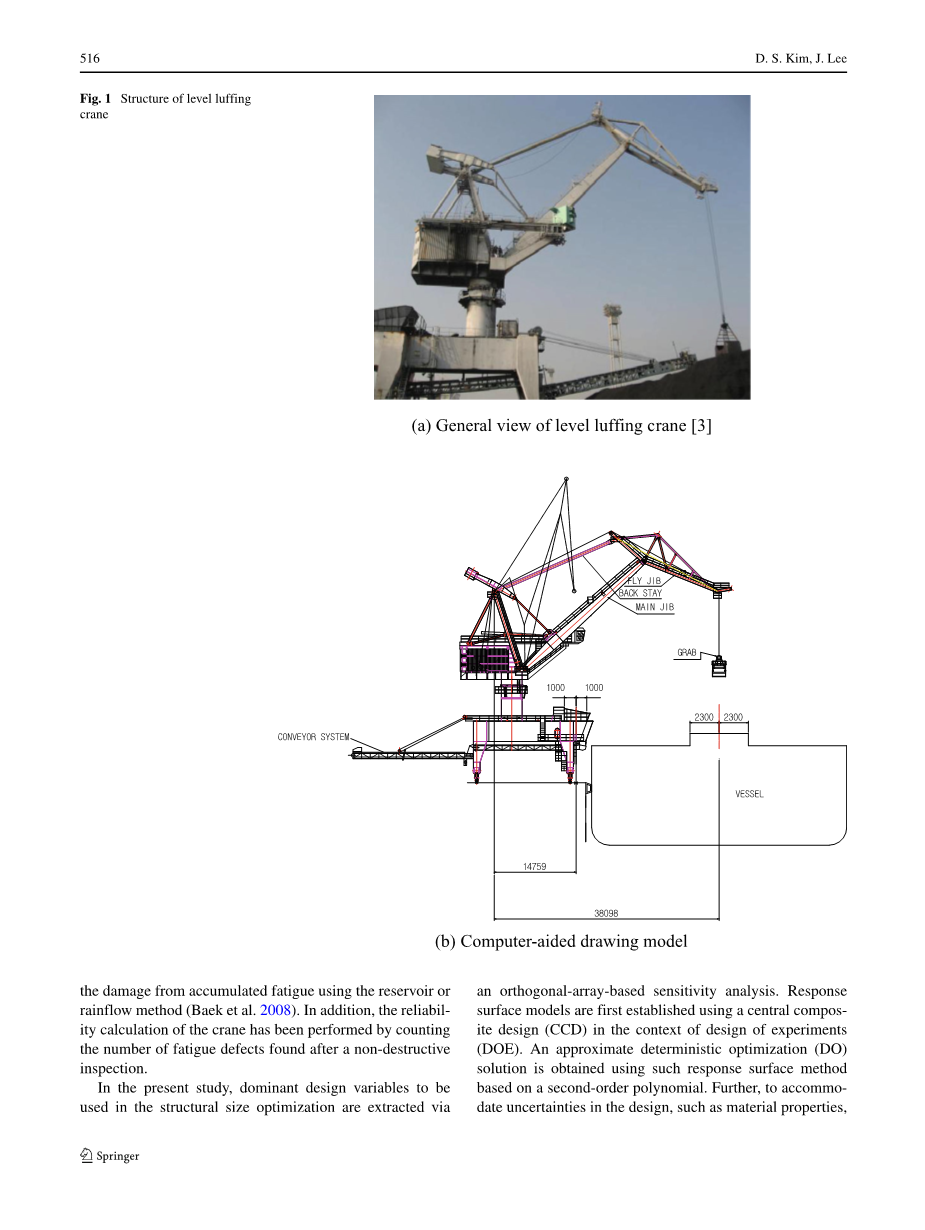
本文讨论了一种水平变幅门座式起重机双摇杆四杆机构优化轨迹方法的应用。首先,(Cabrera等人2002; Acharyya和Mandal 2009)开发了一个数值模型以确定轨迹。在臂架双摇杆结构的弯曲轨迹中,垂直振幅应尽可能小,同时也应满足船舶和港口之间在水平移动距离上的公差范围。第二,应通过考虑移动来识别最佳弯曲轨迹距离和轨迹的幅度,目的是根据每个距离的长度来确定实际模型,通过相互联系以获得运动优化。之后,将该模型应用于门座式起重机(一种用于装卸港口在船舶和地面之间的港口设备),如图1所示。图1(a)显示设备如何操作。自从在Mokpo煤码头安装以来20年,Jeonnam,韩国2013. LLC规格包括额定容量10吨,总重量350吨,高度35m,最大工作半径为38m,最小工作半径为14m。 图1(b)是计算机辅助设备的绘图,包括每个部件的名称。本设备的研究可分为研究链接的组成和结构评估。这种双连接机构的组成已经被之前Moon等人2009; Hur等人的研究中描述2011),他们分析了LLC设备链接组成来描述设计参数的变化。接下来,进行了对于设计的可靠性的疲劳分析和评价(Xieetal。2010)及其结构健全性(Kimetal。2008)的相关研究。在疲劳分析中,首先计算设计周期光谱,然后计算应力使用负荷评价结构块的光谱疲劳在每个周期领域的组合。结构的剩余寿命通过使用由累积疲劳造成的损害的预测雨水法储层计算(Baeketal。2008)。此外通过计数的数量检查来实现起重机在非破坏后发现疲劳缺陷的可靠性计算。在本研究中,主要设计变量为用于结构尺寸优化中的基于正交阵列的灵敏度分析。首先在实验设计中先后使用中心复合设计(CCD)建立表面模型(DOE)响应。使用这种基于二阶多项式的响应面法获得近似确定性优化(DO)方法。此外,为了适应设计中的不确定性(例如材料性能,尺寸公差和外部载荷条件)进行基于可靠性的设计优化(RBDO)以评估在压力方面的失效概率的偏载约束。计算来自DO和RBDO的最佳设计解决方案,包括在严重负载条件下对DO和RBDO解决方案的评估。
2 LLC机制分析
这里,轨迹运动被认为是描述LLC的操作的四杆平面结构。四杆机构的所有几何大小都是如图1所示。 可以使用下面所示的闭合方程执行四杆机构的位置分析:
r2sintheta;2 r3sintheta;3= r4sintheta;4 (1)
r2costheta;2 r3costheta;3= r1 r4costheta;4 (2)
在未知(1)和(2)是theta;3和theta;4,它可以从输入角度theta;2和Freudenstein的公式计算。然后,可以表示耦合器坐标(CXr,CYr)如在(3)和(4)中基于参考坐标图 2:
CXr = r2costheta;2 rxcostheta;3-rysintheta;3 (3)
CYr = r2sintheta;2 rxsintheta;3 rycostheta;3 (4)
如刚刚提到的,theta;3的值可以从a计算,输入角theta;2和Freudenstein方程
接下来,基于参考坐标系的目标点的位置得出如下:theta;C可以通过使用余弦定律获得。
TXr = CXr r5 cos(theta;3 theta;C) (9 )
TYr = CYr r5 sin(theta;3 theta;C) (10)
因此,如果基于世界坐标系添加平移运动和旋转运动,则目标点T的位置被定义为:
(12)
现在,将轨迹作为路径生成的函数 规定(12)中的目标点。 双摇杆的平面机构具有经历平移和旋转的二维运动,如图2所示.双摇杆沿顺时针方向旋转68度以产生292(= 360-68)度; yo的位置平移13,200mm 在y方向上并且不在x方向上移动,其被描述为(12)中的[0,13200] T的向量。在里面本研究共有7个链接,记为r1〜r5,rx和ry用于规定theta;2为的轨迹机制输入角。 本文使用的初始基线值为r1 = 14,200mm,r2 = 23,000mm,r3 = 6300mm,r4 =27,400mm,r5 = 13,200mm,rx = 5900,ry = 1500m,基于真实的LLC结构和输入角度范围从92到128◦。使用这些值的轨迹路径如图3所示,路径生成的结果均列于表1。
3 LLC轨迹设计
3.1灵敏度设计
LLC轨迹优化的目的是最小化链接铰点的垂直振幅的范围。七个链接(r1〜r5,rxry)是生成轨迹所必需的点。这些点链接成为设计变量,列出这些点,r1被建立为基本点。因此,有效地使用六个变量(r2〜r5,rxry)来设计轨迹。本研究基于DOE的灵敏度分析从最初的六个设计点中提取更多的主设计变量。水平设计见表2。 正交阵列数据结果在表3中给出。 基于均值(ANOM)的灵敏度分析的因子效应(Lee和Kwon 2013)见表 4,其中两个参数r5和rx对移动距离和轨迹幅度的影响较小,因此,这些变量从进一步考虑中排除,并使用剩余的四个变量r2〜r4和ry进行优化。
LLC结构基于倍频器机制的移动,并且将其移动轨迹生成到输入角度。轨迹优化中的目标函数是装载/卸载轨道在船舶和港口之间其中的垂直振幅。式(14-1)和(14-2)的约束条件是船只装载到卸载位置的允许的端口,如图1(b)所示。如前所述,初始设计具有r2 = 23,000mm,r3 = 6300mm,r4 = 27400mm,ry = 1500mm。
4 轨迹优化的制定
本研究的目的是减小轨迹的幅度并优化四连杆中连杆的长度。由于“在y方向上的振幅”(即垂直距离)增加,对结构的重复加载变得更累积,并且操作时间也增加。结果在本研究中轨迹的垂直振幅将被最小化。长度优化的目标函数和设计约束如下:
在y方向上最小化幅度 (13)
根据35.798mmle;x方向le;40.398mm用于装载到容器 (14-1)
13.759mmle;x方向le;15.000从端口卸载759mm (14-2)
22.500le;r2le;23.500,6.100le;r3le;6.500(单位:mm)
26.800le;r4le;27.800,1.300le;ryle;1.700
轨迹包括三个重要点如图1所示。5除了如图6所示的移动y方向。 这里,三点A,B和C对应于装载点,最高点之间的装载和卸载,以及卸载点。点A对应于在容器处的装载/卸载位置。因为船可以由于水波而可移动,对于点A是可能的向右和向上移动。运动到左边和底部是可能的,因为这是位置在C点装载和卸载到地面。公差范围被选择为从2,300到 2,300mm装载到船舶,-1000到 1000毫米从港口卸载。还可能有从点B向左右移动和向下移动。
轨迹优化通过基于全因子设计(FFD)的运动学分析来进行,使得设计变量值选择为r2 =(22500,23000,23500),r3 =(6100,6300,6500),r4 =(26800,27400,27800),ry =(1300,1500,1700),如表2所示是具有四因子和三级的FFD,得到总和的 81次评价。最佳解决方案最终确定为满足目标函数值最小化的约束条件。
|
分类 |
最小mm |
最大mm |
最大到最小mm |
|
移动距离(x) |
14,758.8 |
38,098.2 |
23,339.4 |
|
振幅(y) |
13,607.2 |
14,768.1 |
1,160.9 |
|
水平 |
R1 |
R2 |
R3 |
R4 |
rx |
ry |
|
0 |
22500 |
6100 |
26800 |
12700 |
5700 |
1300 |
|
1 |
23000 |
6300 |
27400 |
13200 |
5900 |
1500 |
|
2 |
23500 |
6500 |
27800 |
13800 |
6100 |
1700 |
4.1轨迹优化结果
当优化链路的长度以减小轨迹的振幅同时满足约束移动距离的范围时,目标函数值应该小于标准长度轨迹的生成值,因为应力和偏转随后基于这个长度在实施结构分析时增加,因此如果当r2的长度同时保持在其剩余的三个变量基线值处,轨迹将向上移动。相反,减小r3,r4和ry的长度尽可能将整个轨迹移动到底部。这里,ry被排除为设计变量,因为它的基本长度小; 同样,r2和r4之间的选择是任意的,因为同时减小这两个长度对轨迹没有影响。 因此,r2和r3被选为最终设计的变量。减少长度r2和r3以优化对称抛物线的长度,同时保持在施加的约束内点A和C产生值r2 = 22,875mm和r3 =6165mm。该图显示在图6中和结果值列在表4中。作为优化的结果,其值在误差范围内(min:3.18%,max:0.2%)与现有四杆机构相比,从移动距离一侧观察的目标点结构。最终振幅(804mm)几乎减小基准线振幅(1161mm)为31%的运动学运动。当这个优化结果应用于实际的结构是有利的。船舶的装运位置可以由于外部因素(波,位置船只泊位等)减少或增加,当船坞装载和卸载时使用实际结构(即,LLC)。如果移动距离增加,则可以满足该位置公差。此外,如果幅度随着每个链路的长度减小而减少,则优化链路的长度变为在这种情况下显着的偏转和应力减少相同的负载。基于强度的尺寸优化和此轨迹优化的结果将是在将轨迹设计中的数值优化结果与实际LLC测量进行比较之后在下一节讨论。
E.J.Haug,et al的方法使用运动学方程(成本函数)的位置,速度和加速度分析, 一旦约束函数通过传统的非线性规划可以获得最优解。另外,通过灵敏度分析可以获得状态变量的变化,虽然有集成运动分析,设计和优化,数学过程的优势但是需要在配方中求解困难的微分方程。 而当前的研究使用基于ANOM的灵敏度分析和附加有81功能评价的全因子设计简单的正交阵列数据来确定了优化的轨迹设计,而不依赖于复数微分和代数方程。
4.2真实模型测量的验证
在本节中,将获得的轨迹设计解数值机制分析和优化过程与LLC的轨迹进行比较后,链接的实际长度是韩国在Mokpo港安装和使用的LLC设备已应用的实际模型,并且应用优化链路的长度并安装在飞行臂,后撑和主悬臂段在轨迹试验中,三维光波仪器GPT-7502 2011用于测量LLC在卸载操作条件下的轨迹。坐标变换的值基于角度变化通过将主悬臂的下铰链销的中心设置为起点并在如图所示的终端悬臂的终点的铰链销的中心处建立目标来测量。如图7测量的测试模型与图1所示的实际LLC相同。 终点的测量间隔为5度输入角。通过使用从
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141774],资料为PDF文档或Word文档,PDF文档可免费转换为Word



