仿生机器鱼设计及其运动控制研究开题报告
2020-04-13 15:52:53
1. 研究目的与意义(文献综述)
目的及意义
鱼类作为自然界最早出现的脊椎动物,其种类繁多,生活环境各异,为了觅食、御敌、繁殖后代和集群洄游等生存需要,经过亿万年的自然选择进化出了非凡的水中运动能力,其游动具有推进效率高、机动性强、隐蔽性好、噪声低等优点。鱼类在水中运动的完美性,吸引着大批学者研究鱼类的运动机理和开发仿鱼类水下机器人。
人类的发展离不开资源的持续供应,随着陆上资源的日益紧缺、未来海洋资源的开发成为现在研究的热点。随着人类科学和技术的不断进步,适应各种非结构化环境的水下机器人将会得到迅猛的发展。传统的基于螺旋桨的人造水下航行器,在启动、加速性能、运动灵活性、受承载空间等方面的缺点限制了其作业时间和范围,进一步限制了其应用领域。仿生机器鱼作为一种结合了鱼类推进模式和机器人技术的新型水下机器人,与传统的基于螺旋桨的人造水下航行器相比,具有以下几方面基本特性:1)推进效率高,运动能力强,机动性能好;2)系统结构简化,机械结构简单;3)流体性能优良;4)体积小、重量轻、隐蔽性强。仿生机器鱼的这些优点将会使其在以下领域得到广泛应用:
2. 研究的基本内容与方案
本研究的基本内容
1) 了解鱼类运动机理:鱼类运动具有高效性,高机动性,低噪性良好的隐蔽性等特点。本研究将采用尾鳍推进模式,以尾鳍摆动产生推进力。此外,还需要研究鱼类转弯运动的机理。鱼类转弯可分为三个阶段:
① 质心大体上沿一直线运动,头部右拐,尾略向左偏,侧向力平衡,但形成一相当大的向右转的力矩,作用于鱼体。
② 质心沿一高度弯曲的路径运动,这表明鱼体收到一个相当大的、指向路径曲率中心的力的作用。这个力是由于鱼体后部大转弯而引起的。
③ 作用于鱼尾的侧向力使鱼迅速沿新的轨道泳动。
2) 机器鱼的结构设计:机械结构设计需要完成对鱼体的设计,胸鳍、尾鳍的设计以及重心调节功能的设计。本研究暂定为一个舵机实现对机器鱼的运动控制。鱼体内部结构主要分为配重槽、鱼腔、鱼盖及舵机四个部分。
3) 基于fluent的 CFD仿真分析:建立自主游动鱼体的运动学和动力学模型是进行机器鱼研究的首要问题。通过模型的建立,可对机器鱼的运动参数进行仿真。机器鱼的运动模型主要描述机器鱼在空间中的运动情况。采用fluent软件对模型进行仿真分析,分析出模型各参数对于仿生鱼推进和转弯的影响。为便于建模、讨论与实验,需做出如下假设:
① 流体是无粘性、不可压缩的。
② 机器鱼的运动忽略俯仰、侧翻运动。
③ 鱼体在水面运动保持平衡,即不存在升沉的运动。
④ 机器鱼的各段都是理想刚体,不存在摩擦和间隙。
4) 仿生机器鱼控制系统:控制系统设计分为硬件设计和软件设计。硬件设计包括主控制模块、运动模块、无线通信模块、供电模块、指示模块五个部分。软件系统设计主要是编写基于STM32单片机的控制程序。
1. 研究目标
本文的研究目标主要是为了实现研究内容中的所有工作,具体如下:
1) 机器鱼尾鳍的设计:一般新月形、叉形的尾鳍游速较高,巡游时间较长,故本研究将采用新月形的尾鳍。
2) 机器鱼胸鳍的设计:胸鳍具有推进维持平衡的作用,本研究的机器鱼主要靠尾鳍产生推动力,胸鳍只维持鱼体的平衡,故胸鳍只需采用两块铁板安装在鱼体两侧,与水平面平行。
3) 机器鱼鱼体设计及体内布局:鱼体主要有配重槽、鱼腔、鱼盖、舵机槽四部分组成,配重槽分布在鱼头以及躯干部分,用于放置配重块实现机器鱼的配重;鱼腔主要用来放置电池及各个硬件模块;舵机槽根据所选用的舵机大小来设计,使舵机固定在槽内;鱼盖应安装鱼的背鳍防止机器鱼发生侧翻。
4) 运动学建模:本研究将尾鳍采用三关节的的机器鱼,所设计的机器鱼不具有柔性尾鳍的特点,故将其视为刚性尾鳍。以各关节铰点为摆动中心,关节作往复摆动,需要抽象出尾鳍的运动的数学模型,描述其重心运动轨迹。机器鱼的运动与惯性坐标系和鱼体坐标系有关,将鱼体的运动用这两个坐标系表示出来,建立其刚性运动学模型。
5) 动力学建模:需要对鱼体进行受力分析,主要研究流体压力和尾涡对尾部的升力以及阻力的影响。根据大振幅细长体理论,将机器鱼简化为一个细长体进行分析。
6) 基于fluent的CFD仿真分析:先导入并检查网络,选择求解器,选择模型定义和材料材质,然后定义求解区域的性质及边界条件,最后求解设置及其控制,进行迭代计算。
7) 硬件设计:主控制模块采用STM32单片机控制,用来控制系统各部分的协调工作,要选择合适的舵机和电池,用来提供动力。实现各模块之间的电路设计。
8) 软件设计:熟悉STM32的编程,编写的程序要能控制机器鱼游动,转弯等功能。
1. 拟采用的技术方案及措施
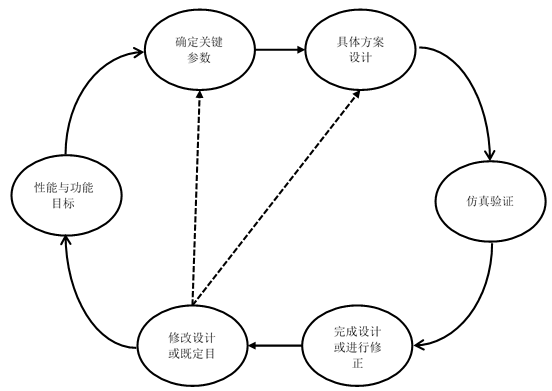
1) 1)总体方案设计:根据所设计机器鱼的主要游动性能指标以及现有的加工设备和制造手段,给出设计所需的关键参数列表,设计具体方案,通过仿真、实验等手段确定具体的参数值并对具体设计方案进行修正以保证指标要求。经过多次修改,最终完成机器鱼的系统设计,具体设计流程图如图3-1所示:
2)硬件设计方案:机器鱼控制系统的硬件是控制的基础,其方案如图3-2所示:
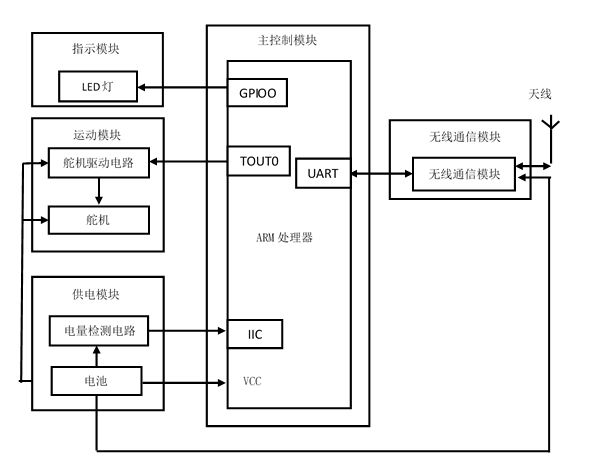 |
图3-2 机器鱼硬件设计方案
3) STM32单片机采用Hello World程序,既容易编写,又容易理解,机器鱼软件 统的设计流程大致如下:
① 选择操作系统RTOS,其好是可提供良好的结构;提高代码重复使用率;易于调试使项目管理变得简单。
② 设备驱动程序的设计,实现对硬件的控制,实现游动转弯等功能。
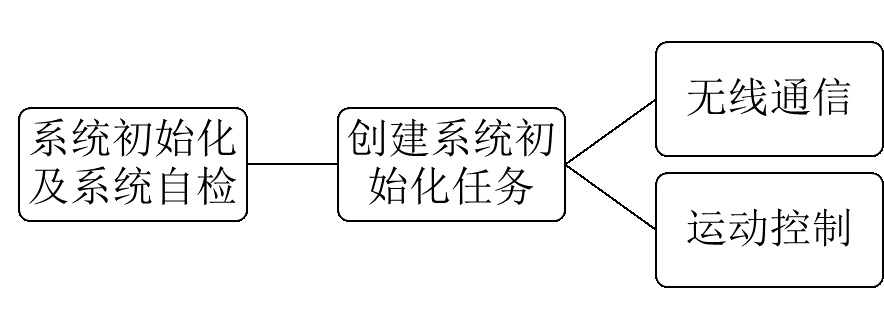
③ 应用程序的设计,通过特定的函数接口调用驱动程序中的函数,从而控制底层硬件,其流程图如图3-3所示:
④ 根据实验的结果完善程序的设计
1. 全文结构
1) 第一章 绪论
① 第一节 研究背景
② 第二节 发展与现状
2) 第二章 仿生鱼体结构设计
① 第三节 鱼类的胸鳍
② 第四节 鱼类尾鳍
③ 第五节 机器鱼鱼体设计及体内布局
3) 第三章 基于fluent的 CFD仿真分析
① 第一节 仿生机器鱼运动学模型
② 第二节 仿生机器鱼动力学建模
③ 第三节 仿真及分析实验参数
4) 第四章 仿生机器鱼控制方案
① 第一节 硬件系统设计
② 第二节 软件系统设计
5) 第五章 总结与展望
3. 研究计划与安排
一、 进度安排
2018.01---2018.03 利用proquest博硕士学位论文全文数据库(全文)等数据库阅读相关文献,并完成外文文献翻译工作;
2018.03---2018.04 设计仿生鱼基本骨架结构和运动机构,并使用fluent实现仿生鱼流体仿真分析;
4. 参考文献(12篇以上)
一、 参考文献
[1] 章永华. 柔性仿生波动鳍推进理论与实验研究[d].中国科学技术大学,2008.
[2] 王耀威,纪志坚,翟海川.仿生机器鱼运动控制方法综述[j].智能系统学报,2014,9(03):276-284.



