基于UR机器人自动上下料工作站系统设计毕业论文
2020-04-15 17:35:20
摘 要
机械制造自动化涉及制造和自动化两方面内容。制造主要研究生产过程中的工艺过程规划,自动化主要研究实现生产制造的自动化方式和途径。工艺过程的规划需根据产品的加工精度编制规范的工序、选择合理的加工设备和过程检测装置。自动化的实现需根据产品的加工工艺和产品的物流布局,借助计算机辅助控制系统,将生产过程程序化、可控化。本论文研究的内容是基于UR机器人自动上下料工作站系统设计,包括自动线输送系统、机器人系统、加工系统、翻转系统等;研究的方向是产品物流布局。通过NX10.0软件的建模功能和ROBODK软件的虚拟仿真功能,进行产品在投入生产前的可行性分析,提前发现生产过程中的诸多问题,以减少不必要的经济损失。经本工作站系统设计,通过虚拟仿真的确能够对实际生产布局起参考作用。
关键词:工作站、自动化、NX10、ROBODK、仿真。
Abstract
Mechanical manufacturing automation involves two aspects: manufacturing and automation. Manufacturing mainly studies the process planning in the production process, and automation mainly studies the ways and means to realize the automation of production and manufacturing. The planning of process planning should be based on the processing accuracy of the product to prepare standardized procedures, select reasonable processing equipment and process detection device. The realization of automation requires that the production process be programmed and controlled by means of computer-aided control system according to the processing technology and product logistics layout. The research content of this paper is based on UR robot automatic loading and unloading workstation system design, including automatic line conveying system, robot system, processing system, turnover system, etc. The research direction is product logistics layout. Through the modeling function of NX10.0 software and the virtual simulation function of ROBODK software, the feasibility analysis of products before they are put into production is carried out, and many problems in the production process are found in advance, so as to reduce unnecessary economic losses. Through the design of the workstation system, the virtual simulation can really play a reference role in the actual production layout.
Key words: workstation, automation, NX10, ROBODK, simulation.
目 录
摘要 I
Abstract II
绪论 I
第一章 工作站布局概论 1
1.1 制造自动化 1
1.2 机械制造自动化途径 2
1.3 机械制造自动化系统 3
1.4 工作站布局设计 3
1.4.1 布局依据 3
1.4.2 布局设计 3
1.5 使用工具介绍 4
1.6 经济及成本估算 4
1.7 本章小结 6
第二章 自动线输送系统 7
2.1 输送系统的选用 7
2.1.1 带式输送系统 7
2.1.2 输送带 8
2.1.3 传动滚筒 11
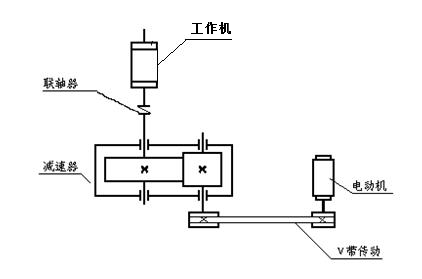
2.2 驱动装置整体布局 11
2.3 电动机的选择 12
2.3.1 电机功率的确定 13
2.3.2 总传动比的计算与分配 13
2.4 传动零件设计计算 15
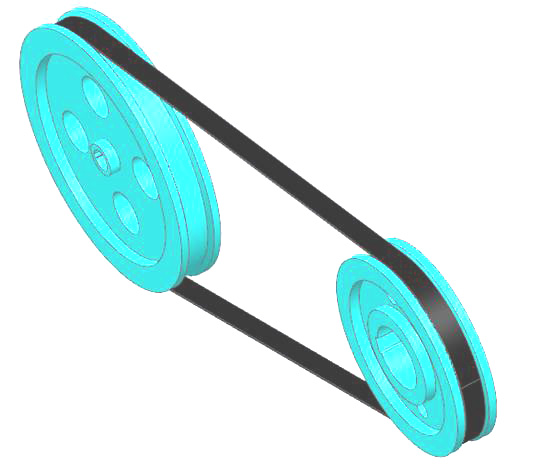
2.4.1 V带传动设计 15
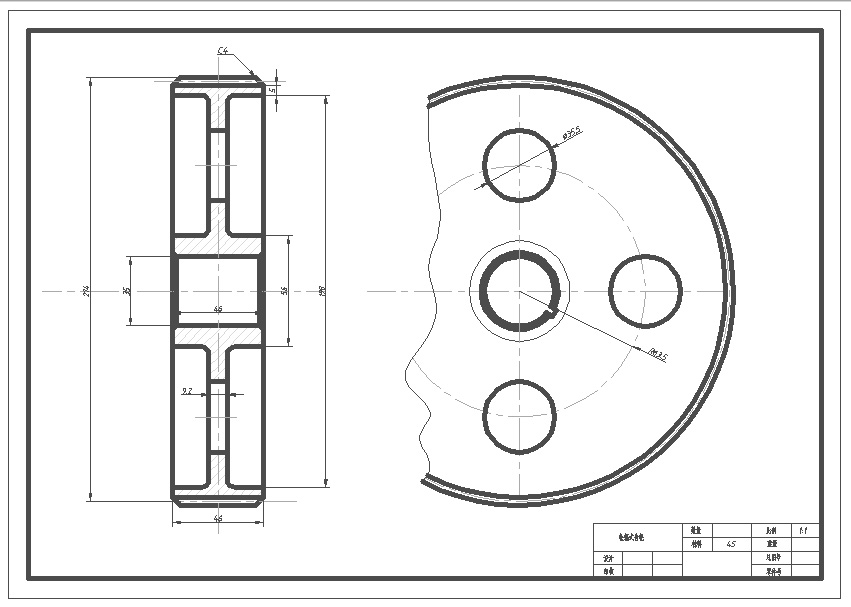
2.4.2 V带外观造型设计 18
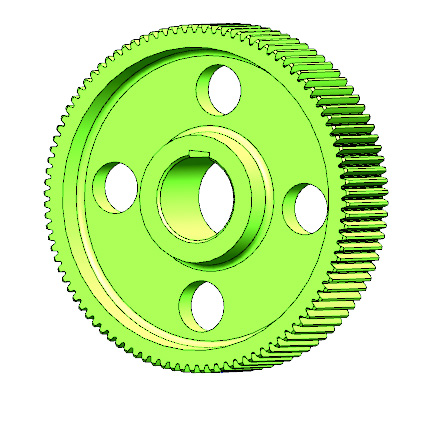
2.4.3 齿轮传动的设计 18
2.4.4 轮辐式齿轮的外观造型设计 21
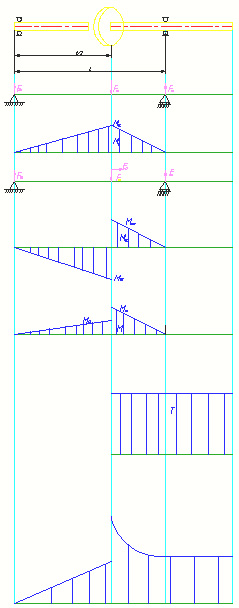
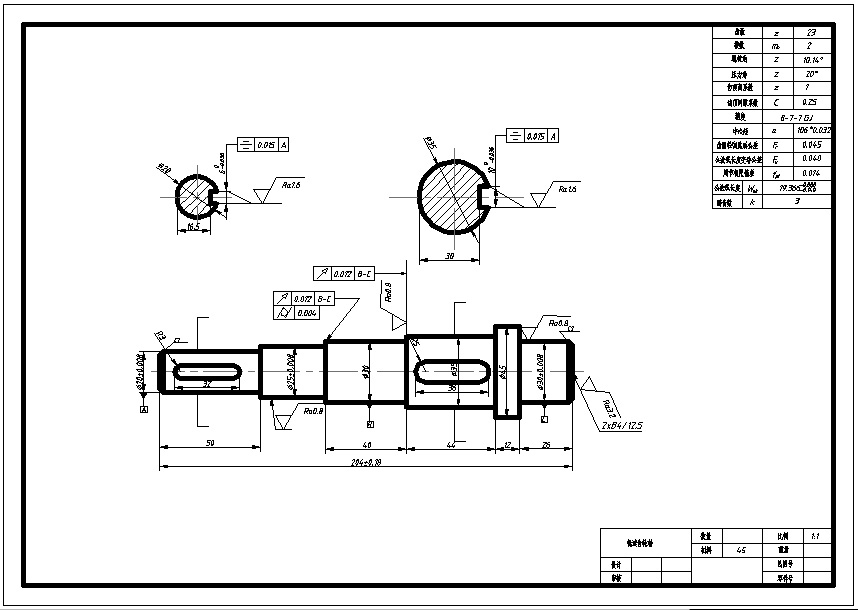
2.4.5 低速轴的设计 23
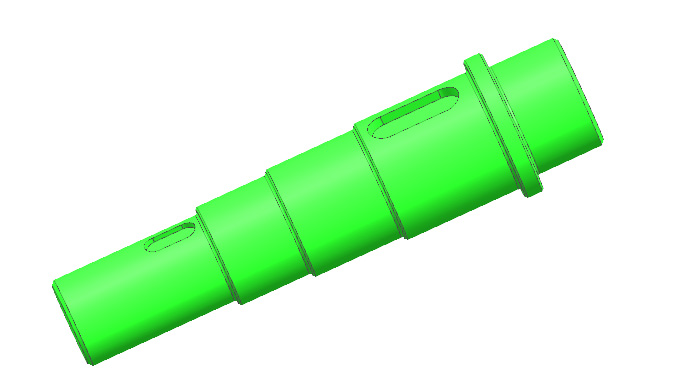
2.4.6 低速轴外观造型设计 28
2.4.7 高速轴的设计 30
2.4.8 高速轴的外观造型设计 34
2.4.9 键的选择及强度校核 36
2.4.10 低速轴处联轴器的选择 37
2.4.11 一级齿轮箱爆炸图 38
2.5 本章小结 38
第三章 机器人系统 39
3.1 机器人选型 39
3.1.1 工业机器人类别 39
3.1.2 UR机器人优势 40
3.2 UR机器人在工作站中的布局 44
3.3 本章小结 44
第四章 加工系统 45
4.1 机床的分类 45
4.2 机床型号的编制方法 46
4.3 机床的选型 47
4.3.1 加工对象的拟定 47
4.3.2 机床型号的拟定 48
4.4 进给系统 48
4.4.1 导轨的结构设计 49
4.4.2 导轨的选型及其长度的估算 51
4.4.3 滚珠丝杠选型设计 54
4.4.4 进给系统模型的建立 62
4.5 床身系统 63
4.5.1 床身材料的选取 63
4.5.2 床身模型的建立 63
4.6 卡盘旋转系统 65
4.6.1 卡盘的定义 65
4.6.2 卡盘模型的建立 66
4.7 本章小结 68
第五章 翻转系统 69
5.1 翻转系统的组成与基本要求 69
5.2 结构分析 69
5.2.1 夹具机身 69
5.2.2 上下移动装置 70
5.2.3 翻转装置 72
5.2.4 水平移动装置 73
5.3 优化 74
5.4 本章小结 75
第六章 总结 77
6.1 研究内容 77
6.2 展望 77
附录 79
附录1总程序 79
附录2子程序 81
参考文献 87
致谢 87
绪 论
0.1 课题研究的背景
最近十年来,世界各国应对科学技术的迅猛发展,特别是在工业界,先后提出工业互联网(美国,2012年)、工业4.0(德国,2013年)和《中国制造2025》(中国,2015年)。它们的侧重点虽然不同,但具有共同的目标—建立智能工厂,实现智能制造,提高自动化水平,以应对制造业出现的劳动力短缺、用工成本高、技术工人队伍不稳定等问题。因此,为应对劳动力危机,越来越多的企业开始通过提高生产过程的机械制造自动化技术来巩固企业的生存和加快企业的发展。
目前,很多制造型企业实现产品生产自动化,绝大多数都选择工业机器人。工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术与一体的现代制造业重要的自动化装备。自从1962年美国研制出世界上第一台工业机器人以来,机器人技术及其产品发展很快,已成为柔性制造系统( FMS) 、自动化工厂( FA) 、计算机集成制造系统(CIMS)的自动化工具。事实证明,采用工业机器人,不仅可提高产品的质量与数量,而且对保障人身安全、改善劳动环境、减轻劳动强度、提高劳动生产率、节约材料消耗以及降低生产成本有着十分重要的意义。
0.2 课题研究的目的
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: