搬运型自导引小车AGV设计毕业论文
2020-02-19 19:58:53
摘 要
AGV作为移动机器人的一种,在仓储物流、制造装配线上发挥着越来越重要的作用,满足了市场多元化的需求。综合其自动化程度、工作效率、交互能力优越,现阶段对于其研究也越发深入。AGV小车是机电一体化的综合性产品,囊括了机械制造及其自动化的基本专业知识,掌握其工作原理也是学生的时代要求。本次的工作内容大致如下:
1.首先描述了国内外的AGV发展状况,以及现阶段国内的AGV发展行情。对一些基本技术及原理进行阐述分析,对其进行充分地认识。
2.分析设计任务的要求,进行小车的整体方案设计,包括各个部分之间的布局以及相应的协调关系,经过几种方案的对比,选择了磁导引的导航方式以及差速轮进行驱动。
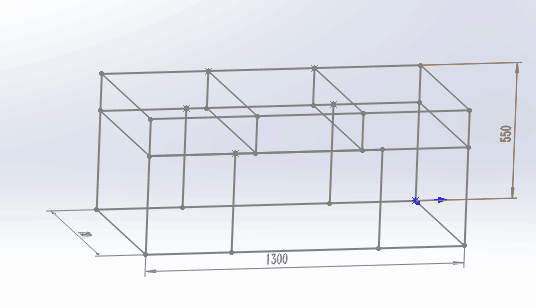
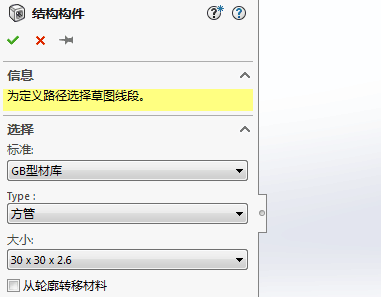
3.根据小车承受负载情况对车架进行设计并进行结构有限元分析,综合比较选择出合理的材料以及尺寸规格;然后根据所需要行驶阻力对电机进行选型,进行驱动单元的设计,并进行简单的装配。
4.选择了PLC为主控制器,规划出控制器与各个单元之间的控制网络,并对电机驱动方面进行了详细控制设计,最后是常用的一些传感器的和其他装置介绍与使用。
关键字:AGV ; 磁导引; 差速 ; PLC ; 传感器
Abstract
AGV, as a kind of mobile robots, plays a more and more significant role in warehouse logistics and manufacturing assembly line matching the need of market diversification. Due to the superiority of automation, efficiency and interaction of AGV, people research and develop it further. AGV is a comprehensive product which involves the specialized knowledge in Mechanical Engineering. It is a requirement for us to master its academic knowledge in school days. The contents of work are as follow.
1.This essay gives a introduction in the developing situation at home and abroad and the developing quotation in current domestic stage of AGV. With analyzing the fundamental technology and principles. I know about a lot for it
2. Combining the design task, begin to design the whole structure. By comparing several plans, I choose the magnetic guidance as its drive mode and differential gear to drive it.
3.According to the load condition, I design the frame, analyze the structure and choose the reasonable material and size of it. Then I design the driving unit on the basis of driving resistance of the motor selection. Then, I assemble them.
4.Next, I choose a PLC, which control and coordinate the relationship between the controller and each unit and design the control system of the motor drive. The essay also includes the introduction and the analysis of some common sensors.and other devices.
Key Words: AGV; Magnetic guidance; Differential; PLC; Sensor
1.绪论
1.1研究目的及意义
本次设计任务是设计一台自动导引型的搬运车,小车可以沿着铺设好的线路行驶,具有一定的负载能力与速度,在轨迹出现偏移时候,可以自动返回引导线路。自动导引小车近年来十分火热,应用也变得更加广泛,许多工厂已经配备了一整套的小车系统以及许多同类型的衍生产品,像背负式、潜入式、叉车型,逐渐步入产业化,系统的技术更加复杂,要对每一子车进行控制规划,还要注意分布安全。在这次的设计过程中,起初了解了导引小车的一些基本结构,在论文库和相应贴吧收获许多概念。从查阅的部分资料可知,导引小车架机械部分的设计涵盖了机械原理与设计以及理论力学的知识,驱动部分是电机选择以及控制系统的结合,各种传感器的应用也是前沿科技的牢牢把握等。通过整体的设计到各部分的分层设计 ,旨在提高学生对机电一体化及其它机械学科的知识的理解运用 ,根据生活生产的需求,进行合理化设计,提出自己的想法与质疑,并优化设计方案。另一方面;在智能制造2025美好愿景以及工业4.0蓬勃发展的大社会背景下,以AGV为代表的自动化生产将会占领主导地位,对其研究也是时代对学生提出的要求。在许多企业的加工车间,AGV作为重要的运载工具,特别是在汽车系列的行业中,大大地的减少了生产物料的搬运时间,节省了许多财力人力,也提高了生产效率。话说回来,不同用途的AGV小车,虽然工作原理大体相同,但因其负载的不同,驱动方式不同,以及工作的环境不同,对其机械结构提出了更加多样的需,也就需要进一步优化设计。而且我们也有理由相信未来的AGV,是更加智能的,自动化程度更高,更加完善的AGVS,这也是每个机械从业人员共同追求的目标。
1.2AGV的发展历程
美国福特汽车在1913年把自动搬运车应用到了汽车底盘装配上,彰显了无人搬运车的先进性,但当时是有轨道的小车,在19世纪50年代中期,英国人在带下安放导引线,成功制出了电磁导引的AGVS,1959年AGV正式应用到仓储物流和企业生产作业。但是最早的自动导引车是在1953年研制的,由一台拖拉机改造成,具有车兜,在一间仓库沿着悬挂空中的导线运输货。自从计算机技术兴,有许多公司将计算机技术应用到AGV 设计中,控制其运动更方便,也方便构建控制系统和其他模块;大约10年发展时间, AGV 的应用范围一天天变得广泛。1973年,位于瑞典的沃尔沃汽车装配厂就已经开始着手设计研发激光导引运输,将其应用于异步装配的环境,提高装配柔性,适应节拍。取代了以前的惯用的传统皮带输送线路,在那时为止,带有计算机并且用于生产装配的AGV大概已达300 辆;八十年代的AGV将新型无线式导引技术融入带自身系统中,包括惯性导引以及激光导引,准确性比之前更高,易于操控,便于管理。同时,需要修改路径的时候,也不用改动或者停止生产。继往开来各种不同导引方式的涌现,导致导引车类型更加多样丰富。AGV也伴随着微机技术的发展而发展,价钱可观,机器性能优良,大多可接受,迅猛发展这。在上个世纪的六七十年代,日本便将自动导引车引入到国内,并进行了开发。让人佩服的是,日本人学习与转化能力,他们觉得外国的AGV功能先进却不匹配国内生产现状,打不开自己的市场 。我们知道,早期的日本主要发展的是轻工业,数码电子等技术占据了工业的50%以上,为此他们AGV重新改装了小车,大致上就是小推车模样,加上蓄电池和控制部分,现在明电舍以及其他公司仍在生产。简化后的AGV叫做AGC。现在的日本自动导引车技术更加完善,也得益于国内的电机与驱动技术,自己购买成本不高,品质确实是数一数二的。渐渐地,他们将技术研究透彻,为了开拓更大的市场,他们将小车输送到了中国,主要卖成品以及模块化的部件,类似驱动单元、伺服电机和驱动器,收到了很好的效果。
1.3我国AGV的发展状况
我国对AGV的关注稍微有些晚,所以开始厂家比较少,相关的研究工作进展相对迟缓,国家在经济上给与了很大的支持,发展成果也处处可见。北京起重运输机械所研究院在1976年研发出了第一台ADB型AGV。北京邮政研究所也为济南军区仓库研究所研究了WAC-1型号的AGV,自主生产许多零件组装供使用。中科院沈阳自动化所在国家“863”计划以及企业大力扶持支持下,完成了许多AGV技术的研究,攻克了许多困难。1996年,云南玉溪烟卷厂在三星公司购买了许多电磁导引AGV,1998年,昆船机械设备集研制出了多模式的激光导引模式AG。到现在,我们国家许多汽车厂、烟草厂家、物流仓库都装备了自动导引小车,也出现了拥有关键技术为支撑的自营企业,像新松、昆船等。他们可以为客户定制车型和其他参数,也可以向其他国家输送自己的产品,与世界先进技术差异日益缩小。从需求领域来看,目前我国 AGV小车需求领分布比较集中,主要分布在汽车、家电等生产物流区域,其中汽车工业领域 AGV 小车销售额占总比重的 24%,家电制造占比 22%。 除了这些行业的应用,AGV 在商业中也十分活跃,尤其是在淘宝、京东等网络商城火爆引起的快递行业,需要大量的分拣运输,只靠人是不行的,京东也提出来了智能云物流的模型,主要应用的还是AGV小车.。
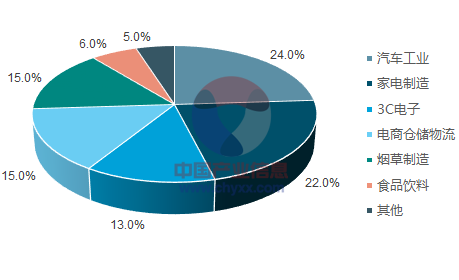
图1.1 AGV需求分布
现在 AGV小车企业发展至今已经有几十家,有近三成厂家是冉冉升起的新企业,这表明研发的深入与许多技术的打通,我们也拥有者巨大的需求市场。相比前几年的一台机器几十万到百万,到现在的二十万左右,导引小车变得比更加普及,国内自主品牌所占的比重越来越大。

图1.2 新松AGV 图1.3 昆船AGV
虽然成绩可观,但是我国AGV小车行业也存在一些棘手问题:市场对小车的需求比较多元化,许多小车的核心零部件源还是要从国外引进,如电机和配套驱动控制器、系统、其他传感器等,远不如外国先进;其他企业很难加大资金研发,关键技术人才不足。针对这个现状,我们还是要是要自主研发简单实用的AGV,不照抄照搬,因地制宜,按照需求的功能进行组装搭配,操作简单,易于操作被用户接受,成本支出不会太多,效果明。值得一提的是AGV的发展前景肯定很好,以后的智能元素会深入更多,企业 以AGV车队为中心的工厂运输现在可以满足日益多样的生产要,具有更多的柔性和可能性。
1.4本次研究的主要内容
根据小车的负载能力,设计车架的机械结构,建模组装,并对其进行有限元分析,确保其结构安全的可靠性,然后由小车的运动方式,选择出喝水驱动结构,从计算行驶阻力,到选型电机,再构建驱动单元结构,与其他部件进行装配,得到整体机械结构的装配体。最后对控制系统部分设计,采用了PLC作为主控制器对电机驱动,还包含了一些传感器的选用和功能介绍,完成整个系统的设计。
2. AGV整体方案设计
2.1AGV综述
2.1.1AGV定义及特点
自动导引小车(简称AGV),有的也被叫做导向搬运车。通常是指装有电磁或光学等自动导引装置,沿着已经设计好的路线行驶,可以对小车编程,车上具备安全保护、移载和其他附属功能的运输车。AGV属于移动轮式机器人的一种,集结了机械、传感器、通讯控制、电子、计算机等技,安全平稳性高,可代替人进行危险情况作业,效率也很出色。经过几十年的发展,小车不断更新换代,技术不断创新提升,也具有很多的优点:
1.小车可以自动识别路径,并进行运算选择,找出最优方案,运送快,准时,利用率高。
2.可以和立体仓库配合使用,也可以和机器人、自动仓库、运输线仪一起配合作业,达到多物流的一体化控制。
3.计算机进行控制,精确度高,动作响应快。
4.采用直流电源装置,充电自动化,噪声低,污染小,电池储存效率在多次充放电使用后仍能保持较高参数。
5.路线不固定,交叉能力优越,可重组生产线,比较灵活多变,便于调整和布置,也方便扩展。
6.有很高的安全性,自动躲避障碍区,也可停止在线待命,不耽误生产线的连续性,外观方正立体,布局大气美观。
7.类型丰富,可根据需求设计订做,并配有说明书。
总的看来,自动导引车的优点十分多的,满足大多数工作状况的使用需求,价格随着技术进步也会下降一些,成批的使用效率会更加明显,引导智能高效的无人生产运输未来。
2.1.2 AGV的组成及分类
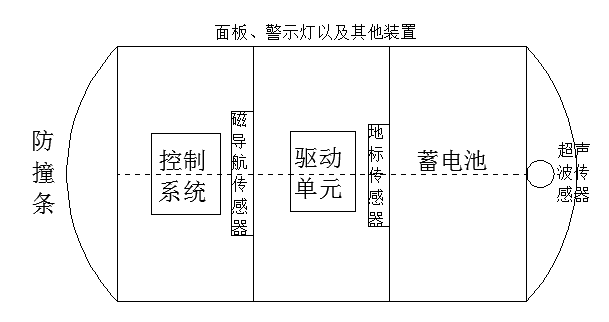
AGV主要由车体、电源、充电装置、驱动单元、控制系统、通信装置、安全装置等部分组成,总体上分为机械和控制部分。
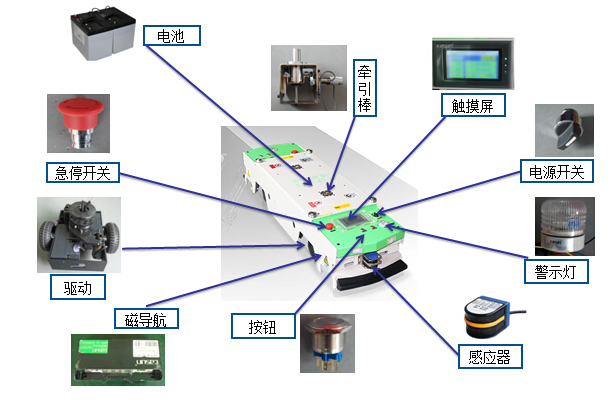
图2.1 常见AGV的模块组成
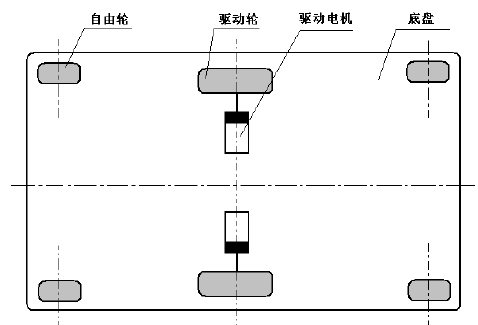
- 车体:由车架、减速装置、主、从动车轮等组成。车架由型材焊接组装而成,车体内主要有电源、驱动和转向装置,降低车体重心。
- 电源和充电装置:大多采用12V、24v、48v的工业蓄电池,并且配有充电装置。
- 驱动单元:包括电机、减速器、制动器、驱动器、车轮等部分组成。为小车提供动力,调整轨迹。
- 转向装置:AGV的转向装置大体上有两种结构
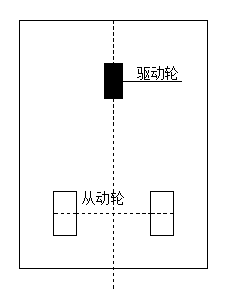
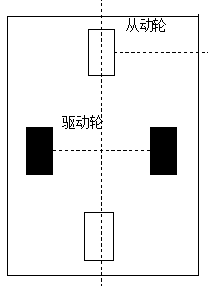
图2.2 铰轴式 图2.3 差动式
- )铰轴转向式 驱动轮子安装在铰轴上,电动机带动减速器和机械连杆机构来带动铰轴运转,从而控制驱动轮运动方向。
2))差动转向式 在AGV的左右侧轮分别安装两个独立电机,通过调控左右两轮的速度不同实现转向。
- 车上控制装置
为了对小车进行监控,由通信系统接受指令并且汇报运行情况,完成对小车的编程。
- 通信装置
大体也分成两类,连续和分散式。连续方式是通过射频或通信电缆接受信号;分散式是在预设地点通过感应或者光学原理实现通信。
- 安全装置
包括接触式和非接触式两类。接触式包括防撞条,并通过触动微动开关来感知外部的特殊信息。非接触包括防碰撞传感。
依据不同的工作场合,AGV可分为潜伏式、背负式、叉车、装配型,可进行单双向运动


图2.4 潜伏式AGV 图2.5 背负式AGV
按照负载不同,也可分为轻载、中载、重载型AGV。
2.1.3 AGV的导引方式
伴随着AGV的快速发展,其导引方式也越来越先进,愈来愈成为AGV的核心竞争技术。现阶段的导引方式大致如下:
1 直接坐标式
用定位块将AGV的运输区域划分成若干坐标小块,通过对小区域的计数实现导引,优点是行驶路径方便修改、简单,导引方式比较可靠,不需要特殊良好的外界。缺点是地面的测量装置比较复杂,导引精度和定位精度不高,工作量大在复杂路径的环境下,就有些弱势。
2 电磁导引式
电磁导引依据电磁感应原理进行引导,一般是在地下埋设电缆,通入低频电压与电流,产生周围磁场,小车上由两个金属型感应线圈,感受电流触发的磁场,这样,在小车中心线偏离路径是,两边的感应电流不同,经过比较器放大器处理后,控制电机运转,回到线路。优点是线路安置在底下铺设简单,不易被损坏,同时也就意味着调整线路不容易。
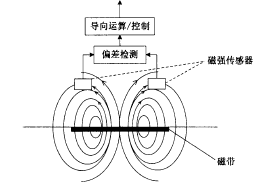
图 2.6电磁导引原理
3 磁带导引式
和电磁导引原理大致相同,用在路面上贴磁带取代在地面下铺设电缆,通过磁感应信号实现路径导引,相对上面方式,灵活性好,改变路径较容易,磁带铺设简单易行,但是磁带与磁传感器易受环路附近金属物质的干扰,磁带容易受到损伤,导引的可靠性与其他方式相比就差了一些。


图2.7磁导引 图2.8 导航磁带
4 光学导引式
在AGV的行驶路面上涂上油漆或黏贴色带组成路线,通过车上紫外线光源对油漆色带进行照射,色带与周围路面亮度会发生不同,车上的光敏元件检测到亮度不同,产生信号差来导引小车回复到路径上。该方式地面路线设置简单易行,但是色带对环境污染和摩擦损坏十分敏感,适合洁净度高的环境,导引可靠性一般。
5 激光导航式
激光导引式主要是包括激光扫描器和激光反射板两部分,在AGV设备中装载激光扫描器,用于发射和接受激光,导引区域四周安装足够接收到的反射板,准确测量每块板子的坐标位置,AGV的PLC中存储了各块反射板上的数据,处理计算后,得到行驶路径的参数和数,转换引导小车行驶的命令。这项技术的引导效果比较好,定位精度比其他几种精确,无须定位装置,路径容易调整,但成本比较高,不适合在外面作业。
6 惯性导航式
惯性导航是指在小车上安装陀螺仪,根据陀螺仪的偏差进行导引,该方式技术先进,灵活而准确。成本也比较高,维护困难,还需要其他辅助装置。
7 视觉导航
以上是毕业论文大纲或资料介绍,该课题完整毕业论文、开题报告、任务书、程序设计、图纸设计等资料请添加微信获取,微信号:bysjorg。
相关图片展示: