连杆零件自动生产线回转式托盘交换器和机器人设计开题报告
2020-02-10 22:43:27
1. 研究目的与意义(文献综述)
连杆是发动机的主要部件之一,能将活塞的往复直线运动转化为曲轴的回转运动从而输出功率。故汽车零部件生产企业需要不断改进和研发自动生产线上智能制造装备以提高连杆的工作性能和生产效率,实现大规模生产。本文旨在设计连杆零件自动生产线回转式托盘交换机和智能装卸搬运机器人。现在汽车关键零部件生产多采用加工中心,而托盘交换机可实现加工中心对工件切削加工和辅助装卸工件同步进行,提高机床的有效利用率。而智能装卸搬运机器人可自动将连杆毛坯从毛坯架搬运至定位装置或者从定位装置搬运出来,可大大减轻操作工人的工作量。
托盘交换机多采用双工作台装置,其“交换形式一般有两种;平移式和旋转式。前者交换时间较长,后者交换时间相对较短。实现双工作台旋转交换的方式又有多种,可以通过电机带动蜗杆蜗轮副实现旋转动作,也可以通过液压油缸驱动齿条、齿条带动齿轮旋转,还有采用摆动油缸实现双工作台托架的往复 180°回转”(王新新,廖敏,吴军强.《高速数控机床两工位托板交换系统》)。孙岗存等在《精密卧式加工中心托盘交换机构的设计》中以 hmc63e 型卧式加工中心托盘交换机构的设计为 例,详细讲述托盘交换机构的设计过程。也有学者只针对托盘交换机构的某一部分进行详细分析的,如杜永锋等在《卧式加工中心托盘交换装置的驱动机构》中分析了利用回转工作台伺服电机驱动、液压驱动、另加伺服电机驱动三种驱动方式,李凯等在《卧式加工中心双交换工作台的托盘定位拉紧一体化技术》详细分析了托盘定位拉紧技术。除此传统的结构分析外,还有不少学者提出了对托盘交换装置的创新设计。杨锦斌在《卧式加工中心托盘交换机构的创新设计》中提出了一种单叶片摆动液压缸在卧式加工中心托盘交换机构的应用的创新设计。综上,目前对于托盘交换机结构的研究较为丰富,方便由此展开自己的毕业设计。
随着现代工业的快速发展以及机器换人工作的不断推进,机械手在国民经济各领域的应用越来越广泛,其在工业生产领域也越来越受青睐。机械手可以完成许多重复的、单调乏味的工作,也能在恶劣的环境中取代人类完成容易产生生命危险或者人身伤害的工作,因此机械手的出现与应用不仅大幅地提高了人类的生产水平,而且改善了工人的工作环境。世界上最早的机械手原型可以追溯到 20 世纪 50 年代,当时美国人 devol 设计并且制造了可编程的关节型搬运装置。美国是世界上最早研究应用机械手的国家,处于世界领先的水平。日本、德国是世界上应用工业机器人最多的两个国家。进入 21 世纪后,国际上主流的机器人生产商主要由日本产和欧洲组成,如日本产的松下、otc 以及欧美产的 abb、kuka 等。而我国对机器人的研究起步相对其他国家较晚,直到 20 世纪 70 年代才出现第一台工业机器人,从开始到现在经历了将近 50 年的发展历程。国内著名的机器人制造公司有新松机器人、首钢莫托曼机器人等。到目前对机械手的研究较为充分,知网上既有对机械手机构设计的论述,也有对机械手控制系统的分析,而本设计更侧重对于四自由度机械手的结构设计。有诸多文献既涉及了机械手的结构设计,也涵盖了控制系统设计,如檀杰的《四自由度物料搬运机械手的研制》、章熠超的《基于电气与气压混合驱动的搬运机械手设计》等。也有更偏重结构设计的,如沈小强等《系统中搬运机械手的本体结构设计》,简要介绍了机械手设计的系列过程。现有的文献给本论文的设计过程提供了有力支持。
2. 研究的基本内容与方案
本文拟结合连杆零件的生产过程,设计连杆零件自动生产线回转式托盘交换机和智能装卸搬运机器人,实现提高企业生产率、减小工人劳动量的目标。
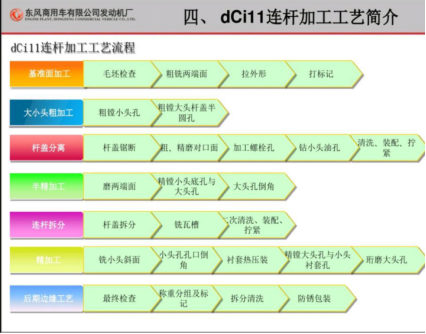 |
图一 连杆加工工艺简图
根据某公司连杆加工工艺流程,对精镗小头底孔和大头孔工序设计托盘交换机和装卸机械手。此工序采用连杆一端面(三个点)、大小头三个侧面定位,因为连杆零件对于大小头孔的尺寸和位置精度要求高,且会经过粗加工、半精加工、精加工三个工序,定位方式基本相同。对于此工序进行托盘交换机和机械手设计有利于保证加工精度,设备通用性增强。
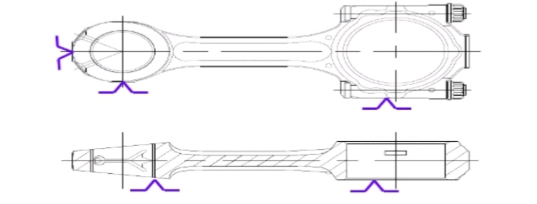 |
图二 定位方式示意图
托盘交换机拟设计双工位伺服电机驱动,每一工位放置一托盘,每一个托盘上放置四个代加工的连杆零件,一个工位用于镗床的半精加工,在加工期间另一工位采用机械手装卸连杆零件。当连杆加工结束,托盘回转机构自动旋转180o,已定位夹紧好的零件继续加工,已加工好的零件用机械手卸下并放入指定位置,清理碎屑后再继续安装未加工的零件,如此循环,保证了加工的连续性,提高生产效率。
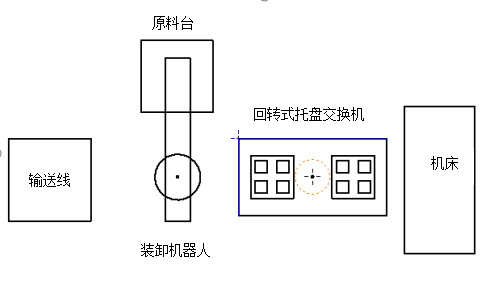 |
图三 连杆加工布局图
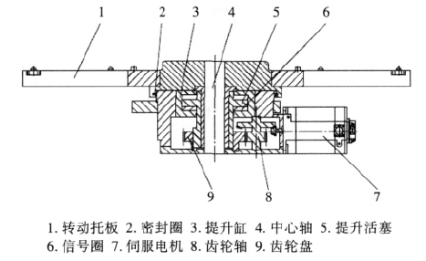 |
图四 伺服电机驱动回转式托盘交换机示意图
搬运装卸机械手拟设计圆柱坐标型四自由度机械手,机械手底座一旋转自由度,两机械臂上下及前后进给两自由度和末端执行器一旋转自由度。驱动装置采用液压与电气联合驱动,机械手底座与末端执行器的旋转运动采用伺服电机控制,直线滑杆的上下前后进给采用液压控制,四个自由度相互配合,保证连杆零件的准确安装与卸下。
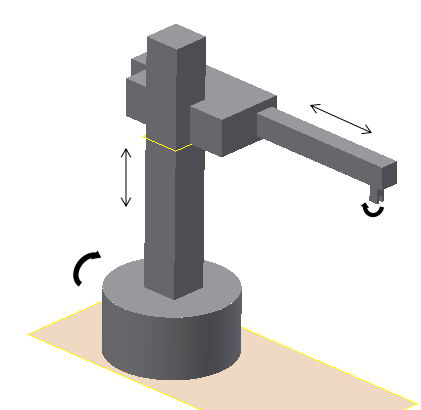 |
图四 圆柱坐标系机械臂示意图
机械臂末端执行器采用两个V形指夹紧连杆工件的中间部分,执行器上附带有视觉传感器,夹紧位置为中间部位,方便连杆的定位。
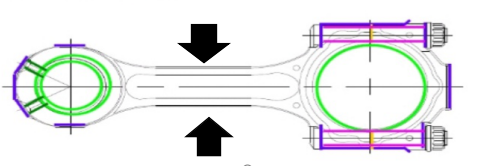 |
图五 末端执行器夹紧位置示意图
3. 研究计划与安排
第1-3周:查阅文献,了 解毕业设计意义和内容,拟定连杆零件自动生产线回转式托盘交换器和操作机器人技术方案,完成开题报告和相关英文翻译;
第4- 12周:完成方案细化、动态分析、理论计算、结构和控制设计,完成回转式托盘交换器装配图、机器人装配图及零件图绘制;
第13-14周:完成毕业设计论文及图纸修改;
第15-1 6周:毕业设计评阅和答辩。
4. 参考文献(12篇以上)
[1]龙创平,陈豪.气动搬运机械手机械结构设计及分析[j].中国设备工程,2018(01):133-134.
[2]王晓天. 智能仓储搬运机械手的设计与研究[d].华北理工大学,2017.
[3]许琳. 物料搬运机械手的建模与仿真[d].齐鲁工业大学,2016.



